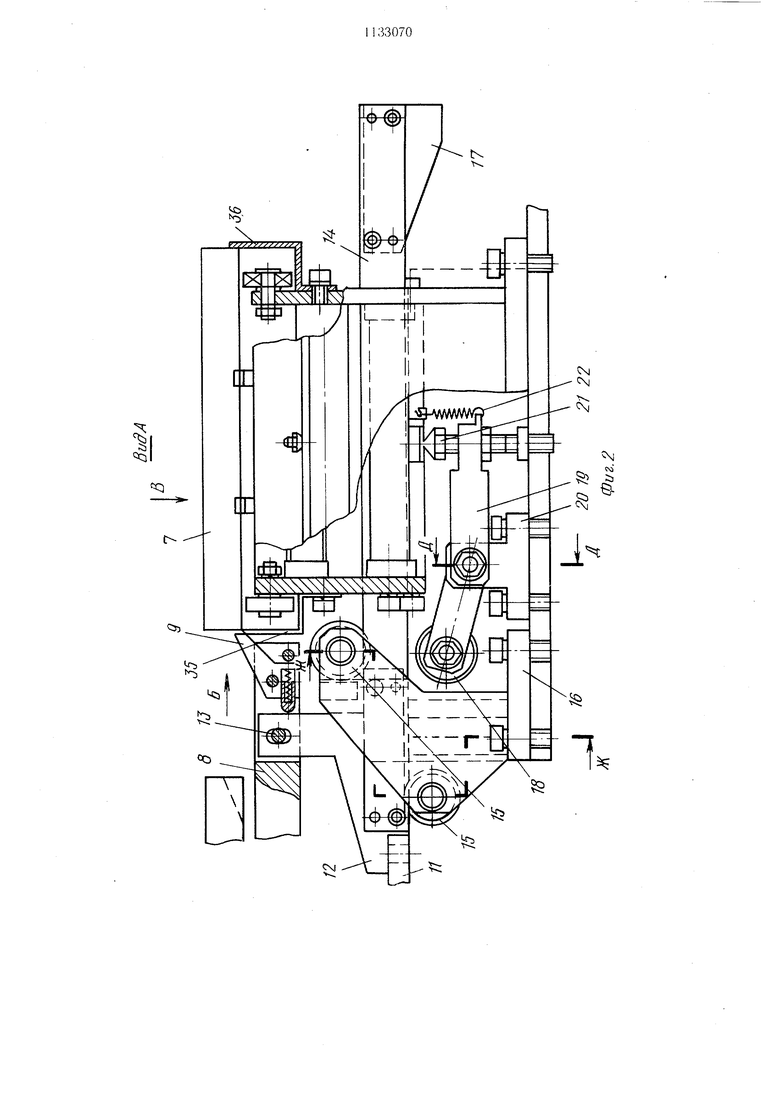
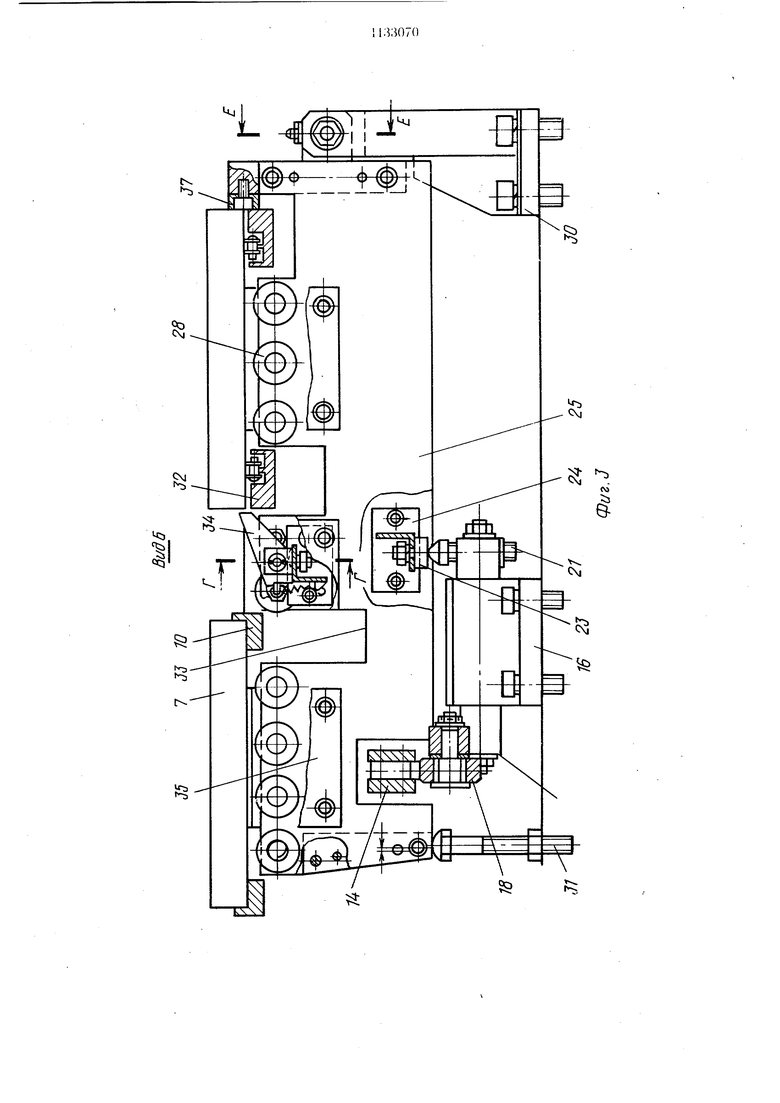
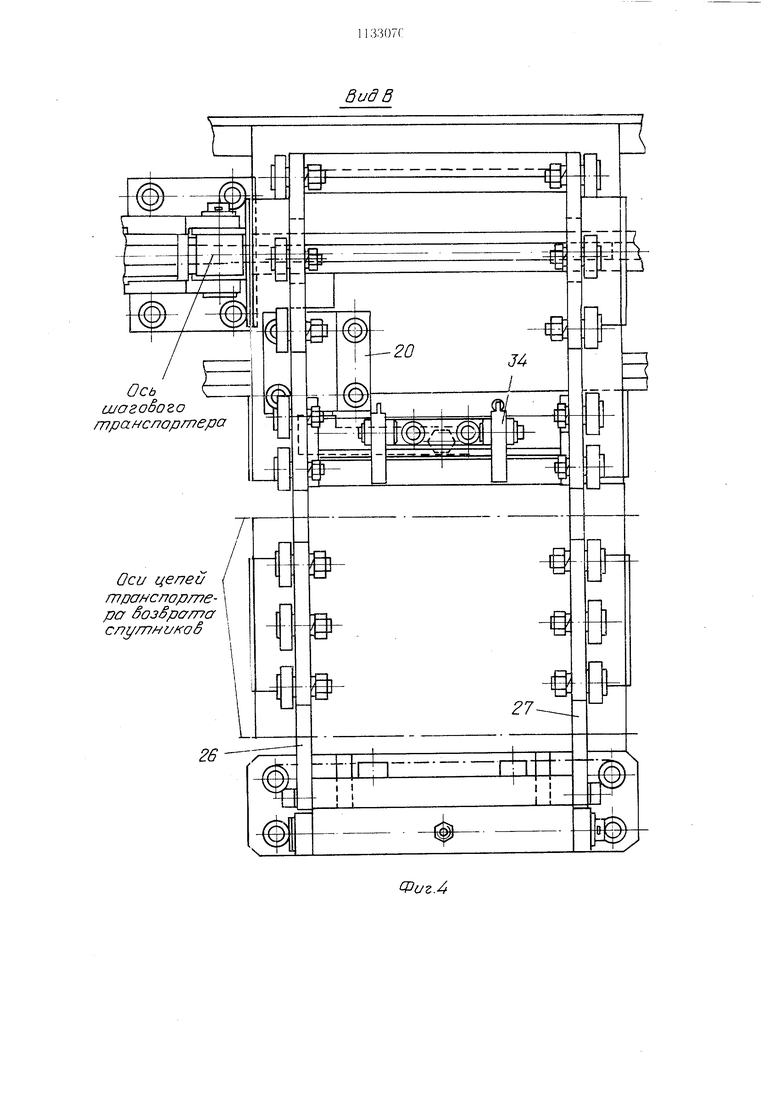
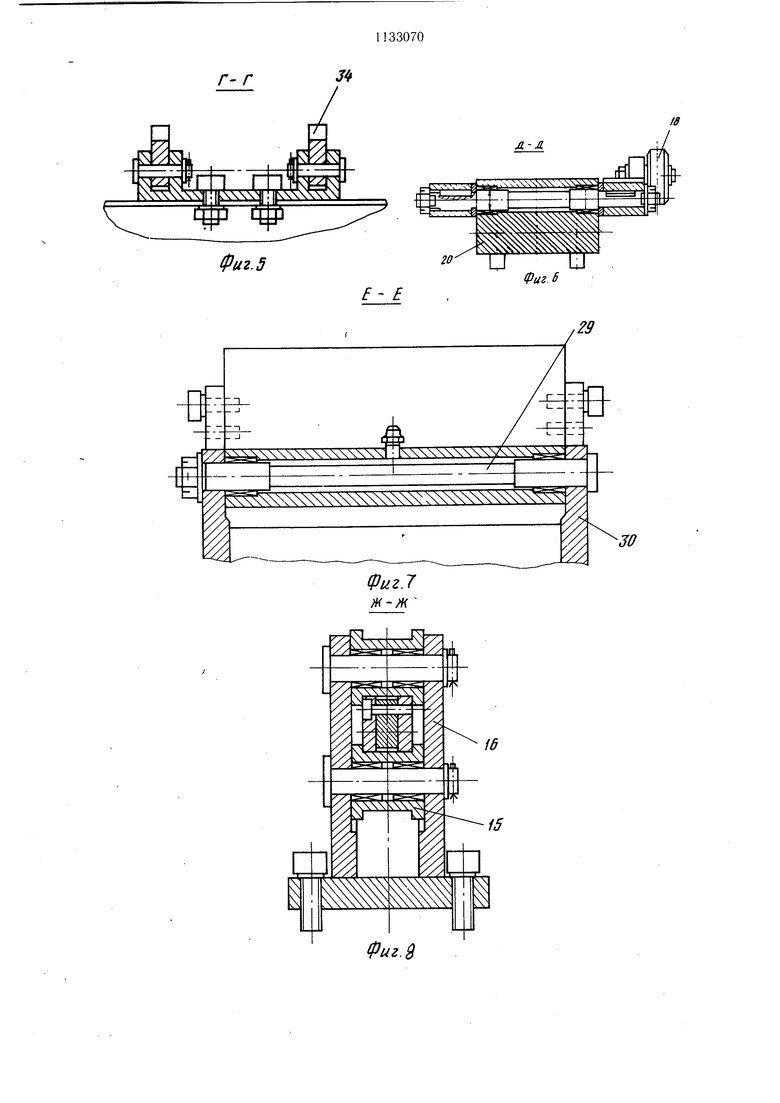
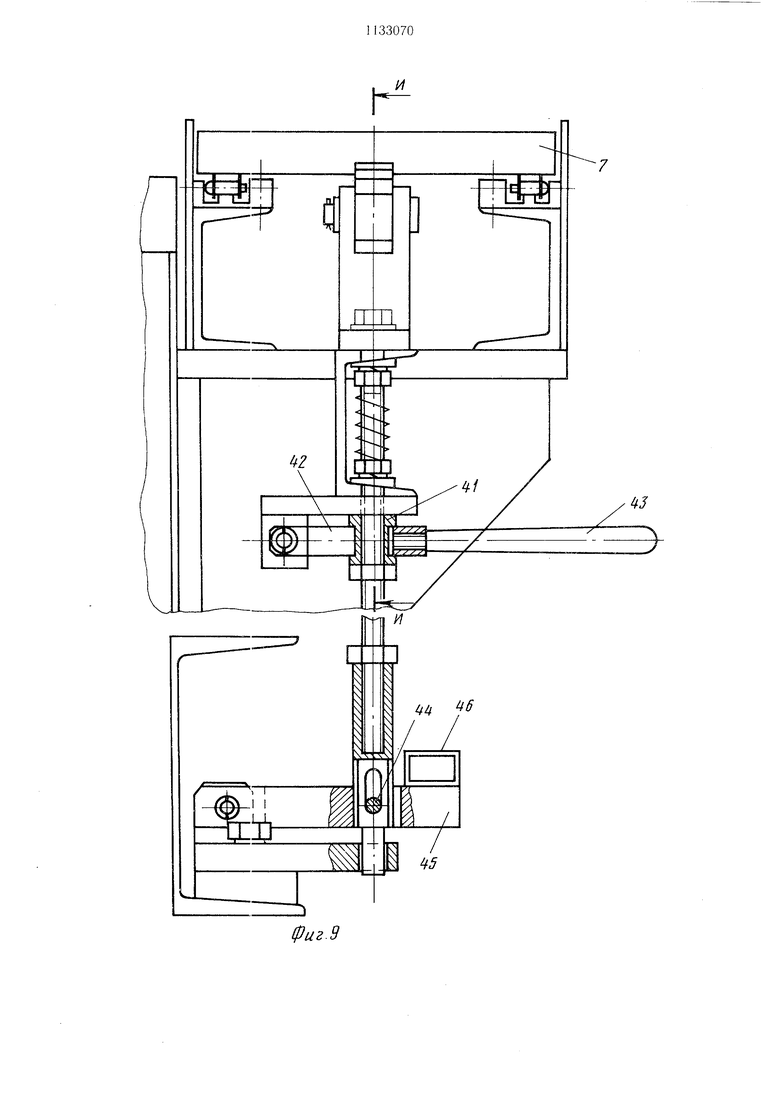
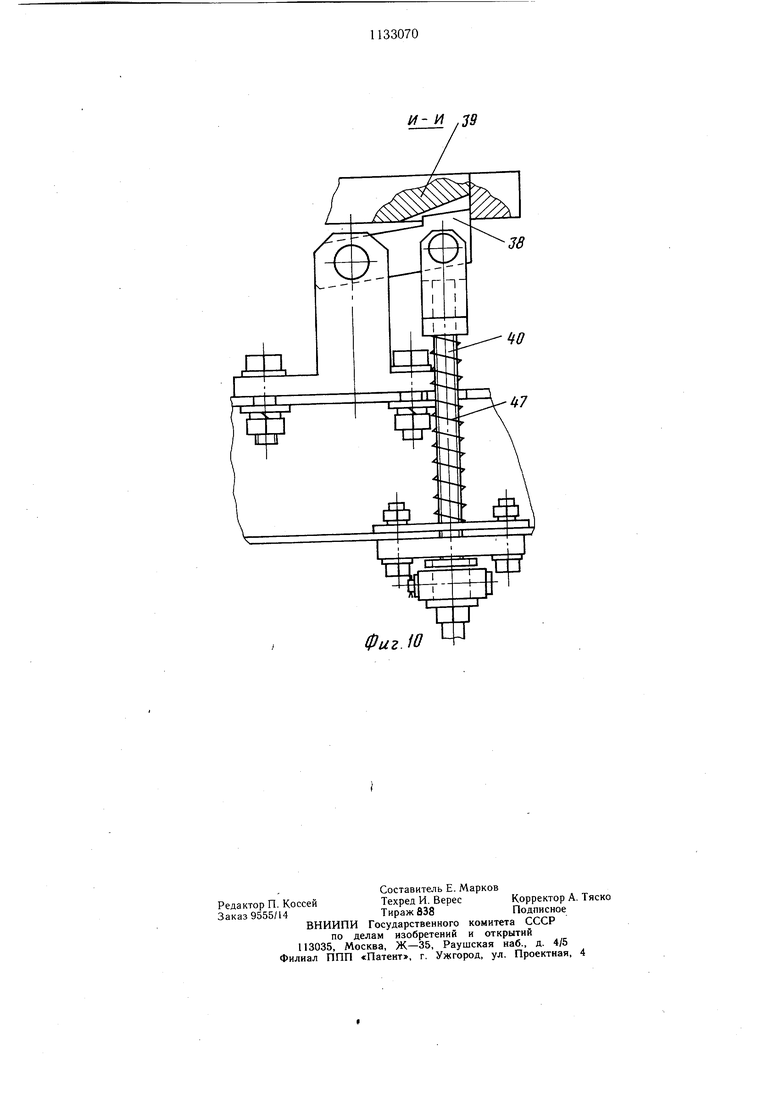
Изобретение относится к механо-сборочному производству, а именно к автоматическим сборочным линиям и автоматическим линиям для обработки деталей с приспособлениями-спутниками. Известна автоматическая линия спутникового типа, содержащая агрегатные станки, установленные по ходу технологического процесса, объединенные штанговым шаговым транспортером, транспортер возврата, состояш,ий из цепного транспортера и двух поперечных транспортеров, расположенных в зонах перегрузки спутников, и механизм отсекания спутников 1. Недостатком известной является наличие специальных приводов для перемещения деталей по поперечным участкам, что приводит к увеличению силовь х, управляющих и блокировочных устройств, снижающих надежность работы. Целью изобретения является повышение надежности работы линии. Указанная цель достигается тем, что автоматическая линия спутникового типа, содержащая агрегатные станки, установленные по ходу технологического процесса, связанные между собой штанговым шаговым транспортером, транспортер возврата спутников, состоящий из цепного транспортера и двух поперечных транспортеров, расположенных в зонах перегрузки спутников, и механизм отсекания спутников, снабжена установленными по концам щтанги шагового транспортера дополнительными штангами с плоскими кулачками и подпружиненным двуплечим рычагом, а поперечные транспортеры выполнены в виде поворотных роликовых рольгангов с ограничителями перемещения спутников и подпружиненными собачками, причем подпружиненный двуплечий рычаг установлен с возможностью взаимодействия одним плечом с поперечными транспортерами, а другим - с плоскими кулачка.1и дополнительных штанг. В линии одно плечо подпружиненного двуплечего рычага снабжено роликом, а другое -- установленным с возможностью регулирования его положения упором, а поворотный роликовый рольганг - подпятником, установленнь м с возможностью взаимодействия с упором. Кроме того, на основании каждого спутника выполнены углубления клиновидной формы с плоским торцом для взаимодействия с механизмом отсекания спутников, который выполнен в виде подпружиненного штока и связанной с ним педали. На фиг. 1 изображена автоматическая линия спутникового типа, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6 - разрез Д-Д на фиг. 2; на фиг. 7 - разрез Е-Е на фиг. 2; на фиг. 8- разрез Ж-Ж на фиг. 3; на фиг. 9 - механизм отсекания приспособлений-спутников; на фиг. 10 - разрез И-И на фиг. 9. Автоматическая линия состоит из агрегатных сборочных станков 1, установленных согласно технологическому процессу и связанных между собой с участками загрузки 2 и перегрузки 3 двумя транспортерами - щаговым 4 и цепным транспортером возврата 5, механизма 6 отсекания спутников 7. Штанга 8 щагового транспортера снабжена собачками 9, которые служат для перемещения спутников по направляющим 10. Штанги могут соверщать возвратно-поступательные перемещения от гидроцилиндров (не показаны). Цилиндр рабочего перемещения штанги связан с кареткой 11, которая имеет возможность перемещаться в призматических направляющих. Кронштейн 12 каретки связан пальцем 13 со щтангой 8 и жестко скреплен с дополнительной штангой 14. Цоследняя направляется роликами 15, закрепленными в кронщтейне 16, на конце штанги крепится кулачок 17, который при отводе штанг в исходное положение и.меет возможность взаимодействия с роликом 18 рычага 19, установленного в подшипниках кронштейна 20. На втором конце рычага 19 закреплен регулируемый упор 21, который пружиной 22 поджимается к подпятнику 23, закрепленному па поперечине 24 поворотного роликового рольганга 25. Поворотный роликовый рольганг 25 (их два, один установлен на позиции загрузки, а второй на позиции съема спутников) состоит из двух щек 26 и 27, на которых установлены с зазором относительно нижней поверхности спутника 7 ролики 28. имеют воз.можность поворачиваться относительно оси 29 кронштейна 30 и в исходном положении под действием собственного веса прижимаются к упору 31. В щеках, в зонах расположения направляющих 10 шагового транспортера и направляющих 32 цепного транспортера, и.меются пазы 33. Рольганг снабжен подпружиненными собачками 34. На щеках закреплены ограничители 35 и 36, рольганг снабжен упором 37. Спутник 7 транспортера и.меет плоское основание, благодаря чему может обеспечиваться его беспрепятственное перемещение по всем участкам транспортерной системы. На позиции останова спутников цепного транспортера для заполнения их собираемыми деталями установлены осекатели 38. Для обеспечения контакта отсекателя с очередным спутником, на нижнем основании его выполнено углубление с клиновым скосом 39. Отсекатели снабжены штоками 40, которые через регулируемые по высоте втхлки 41
связаны с рычагом 42 рукоятки 43 pymioio отвода отсекателя с помощью пальца 44,
размещенного в продольном пазу П1тока
с рычагом 45, обпшм для двух отсекателей педали 46, В исходное положенпе отсекатели 38 могут приводиться с HOMonibio пружин 47,
Автоматическая линпя работает следующим образом.
Собираемые пзде.1пя (например, коромысла клапанов) на спутниках 7 1ереме1цаются шаговым транспортером 4 последовательно вдоль сборочных агрегатных станков 1, входящих в линию. За носледней сборочной позицией расположен участок перегрузки спутников с uiaroBoio 4 na-nenaoii трапспортер 5, выполненпый в внде ролпковою рольганга 25, Сп тн11к 7 Kpaiuieii собачкой 9 по направляющим 10 заталкивается в зону роликового рол1 ганга 25 до упора в ограпичитель 36, Штапга 14, связапная со И1тангой 8 через кронплейн 12 п палец 13, при,ходит под действием o6niero привода (пе показан) в крайнее правое положение (фиг, 2), При наличии команды об отсутствии спутника 7 на исходной нозиции iieinioiij транспортера 4 следует команда па отвод щтанг 8 и 14 в левое положенпе. Кулачок 17 при этом нажимает на ролик 18 рычага 19, второй конец которого через регулпруемьп упор 21 и подпятник 23 поперечины 24 поднимает щеки 26-27 рольганга 25, поворачивая их относительно оси 29 неподвижного кронщтейна 30, При этом ролики 28, расположенные ниже основания спутника, поднимаясь, достигают спутника 7, поднимают его над направляющими 10 и 33, после чего спутник 7 по роликам 28 скатывается до контакта с обрезиненным упором 37, Фиксированное положение спутника в нижнем положении обеспечивается на.тичием подпружиненных ограничительных собачек 34, В зоне расположения направляющих 10 и 33 имеются вырезы 32, которые позволяют производить поворот щек на необходимый угол. Ограничитель 35 имеет высоту несколько больщую высоты роликовой дорожки, благодаря чему при подъеме щек 26 и 27 в верхпее положспие 1П с,1ужпт паправ,1епием д,тя ско,П)Зяще1() спхтппка 7, Легкость перемещонпя 1птапгп 14 и жесткость си,1ового уз,та в зоне взаимоде 1ствия ку,-|ачка 17 с роликом 18 обесиечивается ро,тиками 15, установ.менпымив подппшппках кропп1тейпа Hi, Nnop 2 р1 1чага 19 постояппо поджимается к подпятнпку 23, чем обеспечпвается свосвремеиность срабатываипя (подт.ем) роликового р),1ь га1Па 25,
ОПри очередном рабочем ходе 1Ита1П 8
иииового трапспортера 4 ку,1ачок 17 сходпт с ролпка 18 и ролыапг 25, поворачиваясь вокруг оси 29, возврапи1ется под де|1ствпем собственно массы в исходное по,1ожепие,
j noc,ie чего в зопу его действия по паправ,1яюци1М 10 зата,1кпвается очередпой спутник 7, При этом расстояние между спутпикаNni должно быт бо,1ьп1е рабочее д,1ппы ку,1ачка 17, Прп оп скап1П1 рольганга 25 в исходное по.тожснио сиутпик 7, скативпппкя
0 по роликов1,1М направ,1як)И1Им, подхватывается непрерывно движущимися цепями, размеп1енными в наирав,тяюни1х .33, и иерепосится в зону загрузки деталями.
Останов спутника производится с помощью отсекателеп 38, которые за пи маю г исходное (верхнее) положение с помощью иружии 47, устапов,1еипых па П1тока 40, Па позиции останова имеется два отсекате,1я 38, один из которых служит д,1я останова потока спутппков, а BTOpoii (по ходу
0 цепного транспортера) - для отсекания одного спутника, с целью исключения передачи на него толчков движущихся сиутников и освобождения зоны обслуживания, Отсекатели отводятся одновременно с помони ю педали 46, связывающей два ипока 40, и,1и
с помощью рукояток 43, воздействующих на каждый отсекатель, Отсекатели вводятся в клиновой скос 39, который выпо, на каждом спутнике 7, Далее цикл повторяется.
Пспользование иредложенной лииии иозволяет уиростить конструкцию поперечного транспортера за счет исключения его индивидуального привода.
шогоВого тра.сг ортеро
Оси цепей троислоршеро бозёрап7а
Cni/f77HL/f oe
Фаг.4 фиг. 5 Е
фиг.9
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ СБОРКИ РЕЛЬСОШПАЛЬНЫХ РЕШЕТОК ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2285080C1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ СПУТНИКОВОГО ТИПА | 1972 |
|
SU435923A1 |
| Транспортное устройство автоматических линий | 1982 |
|
SU1033405A1 |
| Поточная линия для сварки изделий в виде тел вращения | 1975 |
|
SU649531A1 |
| Автоматическая линия спутникового типа | 1983 |
|
SU1093487A1 |
| Сборочная линия | 1983 |
|
SU1121127A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
1. АВТОМАТИЧЕСКАЯ ЛИНИЯ СПУТНИКОВОГО ТИИА, содержан1ая агрегатные станки, установ.ченные ио ходу технологического процесса, связанные между собой штанговым шаговым транспортером, транспортер возврата снутников, состоящий из цепного транснортера и двух поперечных транспортеров, рас|}(),1оженных в зонах перегрузки снхтииков, и .ме.ханиз.м отсекания спутников, отличающаяся тем, что, с целью повышения надежности работы линии, она. снабжена ycтaн() но концам штанги шагового транспортера дополнительными штангами с плоскими кулачками и подпружиненным двуплечим рычагом, а ноиеречиые TpaHciiopTejibi вьию.пены в виде новоротиых роликовых рольгангов с 01 раничите.1ями по|)емси1е1Н1я спутников и подпружинениыми собачками, причем п()Д11ружиненп1 1Й двуп.1ечиГ1 рьшаг устаHOB.ien с возможностью вза11М()де11Ствия одпнм п.Цчом с поперечными транспортерами, а другим с П.10СКИМИ ку,1ачками доно, пиrt 1ЬП1)1Х ипанг. 2. ,111ния 110 п. I, 1.Ч1чан и(а,чс.ч тем, IHO одно плечо подиружинепного двуи,нечего рыча1а спабжено ро.шком, а другое устапов,1енным с возможпостью регу.чнроваиия eio 11о,1ожеиия уиором, а noBopoTHiiui ро,1нKoiibni подпятником, устаповленпым с возможностью взаимодействия с по§ 1 и 2, отличающаяся сл тем, что на основании каждого спутника вьп1о.1иены у|-луб,чеиия к.1ицовидп)|| формы с и,1оским торцом д.1я взаимодействия с механизмом отсекания сиутников, которьи вьнюлиен в виде ноднружинеиного штока с связанной с ним педали. СдЭ со
| I | |||
| АВТОМАТИЧЕСКАЯ ЛИНИЯ СПУТНИКОВОГО ТИПА | 1972 |
|
SU435923A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
