(54) ЭЛЕКТРИЧЕСКИЕ КОНВЕЙЕРНЫЕ ВЕСЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Конвейерные весы | 1981 |
|
SU974136A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для дифференцированного учета материала,перемещаемого конвейерной линией | 1971 |
|
SU450208A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ | 1971 |
|
SU310127A1 |
| Конвейерные весы | 1979 |
|
SU922526A1 |
| Конвейерные весы | 1980 |
|
SU885817A1 |
| Конвейерные весы | 1987 |
|
SU1553844A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Электронные конвейерные весы с непрерывным контролем точности | 1980 |
|
SU943534A1 |
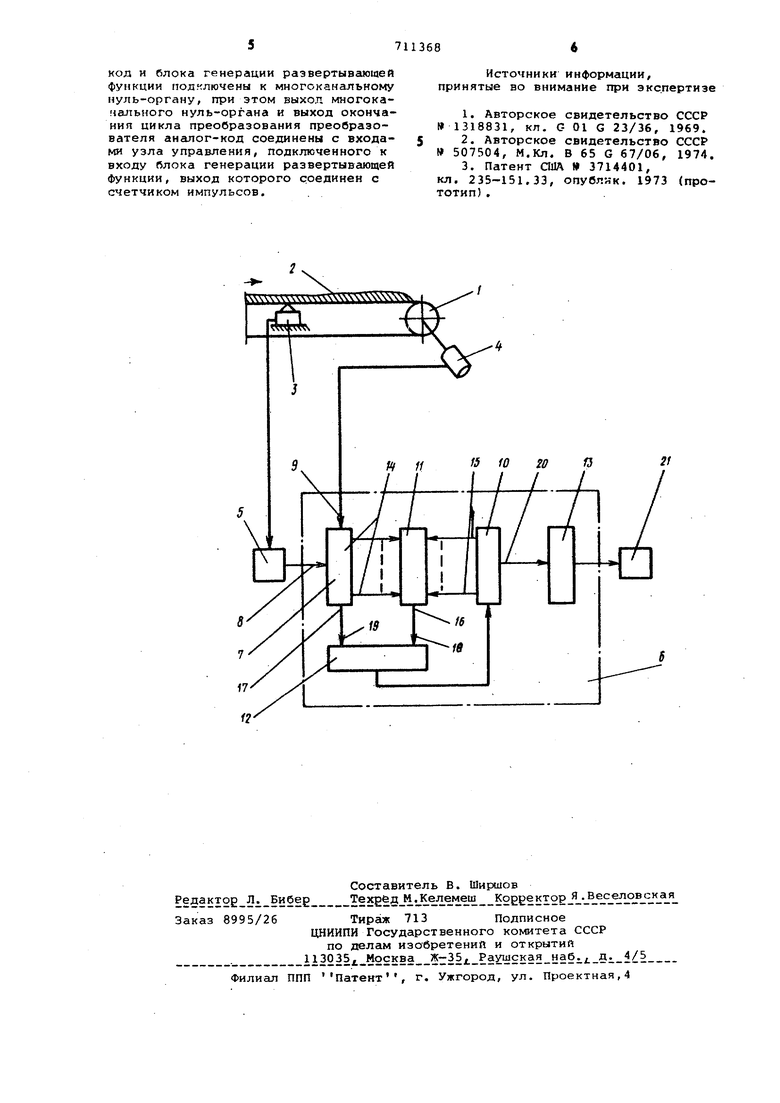
Изобретение относится к области весоизмерительной техники. Известны электрические конвейерные весы, содержа11ие датчики погонной нагрузки и скорости ленты, подключенные к мно жительно-интегрируюшему блоку и регистрирующий прибор 1 и 12. Ближайшим по технической сущности к изобретению являются электро ные конвейерные весы, содержащие аналоговый измеритель погонной нагру ки, частотный измеритель скорости движения ленты конвейера, блок компенсации веса тары, индицирующий при бор и множительно-интегрирующий прибор с преобразователем аналог-код и счетчиком импульсов {3. Известное устройство не обеспечивает требуемую точность в условиях неблагоприятного соотношения номинальной производительности конвейера и предела интегрирования, при повышенных частоте и амп.литуде колебаний интенсивности потока. Цель изобретения - повьшение статической и динамической точности. В предлагаемых электрических конвейерных весах поставленная цель дос тигнута тем, что в множительно-интег рирующий прибор введены блок генерации развертывающей функции, многоканальный нуль-орган и узел управления, причем основной вход преобразователя аналог-код соединен с выходом блока компенсации веса тары, вход запуска связан с частотным измерителем скорости, а кодовые выходы преобразователя аналог-код и блока генерации развертывающей функции подключены к многоканальному нуль-органу, выход которого и выход окончания цикла преобразователя аналог-код соедит нены с входами узла управления, подключенного к входу блока генерации развертывающей функции, основной выход которой соединен с счетчиком импульсов. На чертеже показана схема описываекых весов. Под лентой конвейера 1, переме.щающего сыпучий материал 2, установлены аналоговый измеритель 3 погонной нагрузки и частотный измеритель 4 скорости движения ленты конвейера 1. Выход аналогового измерителя 3 погонной нагрузки через блок 5 компенсации тары и выход частотного измерителя 4 скорости движения ленты конвейера связаны с множительно-интегрирующим блоком б, который содержит преобразователь 7 аналог-код, основной вход 8 и вход 9 запуска которого соединены соответственно с блоком 5 компенсации тары и частотным измерителем 4 скорости движения ленты, конвейера, блок 10 генерации развертывающей функции, многоканальный нульорган 11, узел 12 управления и счетчик 13 импульсов. Блок 10 генерации развертывающей функции состоит например, из управляемого по входу генератора импульсов с ключевым элементом на входе и преобразо.вателя послеловательности импульсов в числовой код (на чертеже не показано) и предназначен для выдачи количества импульсов, пропорционального текущему значению погонной нагрузки конвейера 1, и преобразования этого количества импульсов в числовой код. Кодовые выходы 14 преобразователя 7 аналог-код и кодовые выходы 15 блока 10 генерации развертывающей функции подключены к многоканашьному нуль-органу 11, выход 16 которого и выход 17 окончания цикла преобразования преобразователя 7 аналог-код соединены соответственно с входом 18 окончания и входом 19 запуска цикла развертывающего преобразования узла 12 управления. Основной выход 20 блока 10 генерации развертывающей функции соединен с счетчиком 13 импульсов. Для представления информации о текущем значении результата интегрирования используется прибор 21 индикации, соединенный со счетчиком 13 импульсов.
Весы работают следую1аим образом.
При порожней движущейся ленте конвейера 1 с помоиью блока 5 компенсации тары устанавливают величину сигнала с его выхода, равную нулю. При прохождении материала 2 по ленте конвейера 1 сигнал с анашогового измерителя 3 погонной нагрузки через блок 5 компенсации тары поступает на основной вход 8 преобразователя 7 аналог-код, а скорость движения ленты конвейера 1 при помощи частотного измерителя 4 преобразуется в последовательность импульсов, которые поступают на вход 9 запуска преобразователя 7 аналог-код. В результате на кодовых выходах 14 преобразователя 7 аналог-код периодически с частотой, пропорциональной скорости движения ленты конвейера 1, появляется код .числа, соответствующий текущему значению погонной нагрузки. В момент окончания цикла преобразования преобразователя 7 на его выходе 17 выдается импульс, который поступает на вход 19 запуска цикла развертывающего преобразования узла 12 управления, запускающий блок 10 генерации развертывающей функции. На кодовых выходах 15 блока генерации развертывающей функции появляется непрерывно изменяющийся числовой код. Одновременно с основного выхода 20 этого блока последовательность импульсов, отображающая в уние тарном коде непрерывно изменяющийся числовой код, поступает на счетчик (l3 импульсов. Сравнение числовых кодов, поступающих с преобразователя 7 аналог-код и блока 10 генерации разQ вертывающей функции, происходит в многоканальном нуль-органе 11. В момент достижения равенства кода числа на кодовых выходах 15 блока 10 генерации развертывающей функции с кодом числа на кодовых выходах 14
5 преобразователя 7 аналог-код с выхода 16 многоканального нуль-органа И на вход 18 окончания цикла развертывающего преобразования узла 12 управления поступает сигнал, который
0 посредством узла 12 управления выдает команду на окончание цикла развертывающего преобразования в блоке 10 генерации развертывающей функции. Таким образом, при работе предложенных конвейерных весов в счетчик 13 импульсов поступает последовательность серий импульсов, причем количество импульсов в каждой серии соответствует текущему значению погонjj ной нагрузки, частот.а повторения серий импульсов - текущему значению скорости движения ленты конвейера, а общее количество импульсов, поступивщее в счетчик 13 импульсов и представляемое в приборе 21 индика- ции, пропорционально интегралу по времени произведения текущих значений нагрузки на скорость движения ленты конвейера, т.е. интегральному количеству материала, прошедшему
0 через аналоговый измеритель 3 погонной нагрузки за время работы конвейера.
Формула изобретения
Электрические конвейерные весы, содержащие аналоговый измеритель погонной нагрузки, частотный измеритель скорости движения ленты конвейера, блок компенсации веса тары, индицирующий прибор и множительноинтегрируюЩий прибор с преобразователем аналог-код и счетчиком импульсов, от.ли чающие с я тем,
5 что, с целью повышения статической и динa ичecкoй точности, в множительно-интегрирую чий прибор введены блок генерации развертывающей функции, многоканальный нуль-орган и
Q узел управления, причем основной вход преобразователя аналог-код соединен с выходом блока компенсации веса тары, вход запуска связан с частотным измерителем скорости, а кодовые выходы преобразователя аналогкол и блока генерации развертывающей функции подключены к многоканальному нуль-органу, при этом выход многоканального нуль-органа и выход окончания цикла преобразования преобразователя аналог-код соединены с входами узла управления, подключенного к входу блока генерации развертывающей функции, выход которого соединен с счетчиком импульсов.
Источники информации, принятые во внимание при экспертизе
кл. 235-151.33, опублкк. 1973 (прототип) .
