Изобретение относится к об.пс1сти подъемно-транспортных машин и быть использоз.ано преимушественно в лифтостроении,- а также в ДРУ.Г.ИХ областях- где 1-:собходим контроль за грузки грузоЕ есуыей платформы и в частности пола кабины лифта.
Наиболее близким техническим реыекнем из известных является устройство для контроля загрузки кабины лифта, содержащее неподвижн гто раму, над которой смонтирована подвилсная платформа, шарнирно связаннан посредством рычажной системы с ;-1еподвижной рамой,, и механизм управновешивания с приборами выдачи сигналов, о величине загрузки каби.ны 11,
Недостатком указанного устройства является сравнительно невысокая точность контроля, обусловленная механическим гистерезисом механизма уравновешивания в процессе загрузки-разгрузки кабины.
Указанные явления являющегося следствием трения в шарнирах механизма, число которых возрастает с увеличением требуемого количества сигналов о величине загрузки кабины, а также следствием разности усилий при срабатывании приборов выдачи сигналов при
загрузке и разгрузке кабины, которая приводит к возникновению соответственно переменного по величине крутяшего момента.
Целью изобретения является повы11.;ение точности контроля путем исключения влияния механического гистерезагрузка-разгрузса в процессе
Указанная цель достигается тем, что механизм уравновешивания содер -ит рычаг, на котором закреплены груэъ и кулачок, взаимодействующий поочередно с приборами выдачи сигналов, которые смонтированы так, что направления усилий, необходимых для срабатывания каждого из них,расположены н одной плоскости с ОСЬЮповорота и перпендикулярно этой оси.
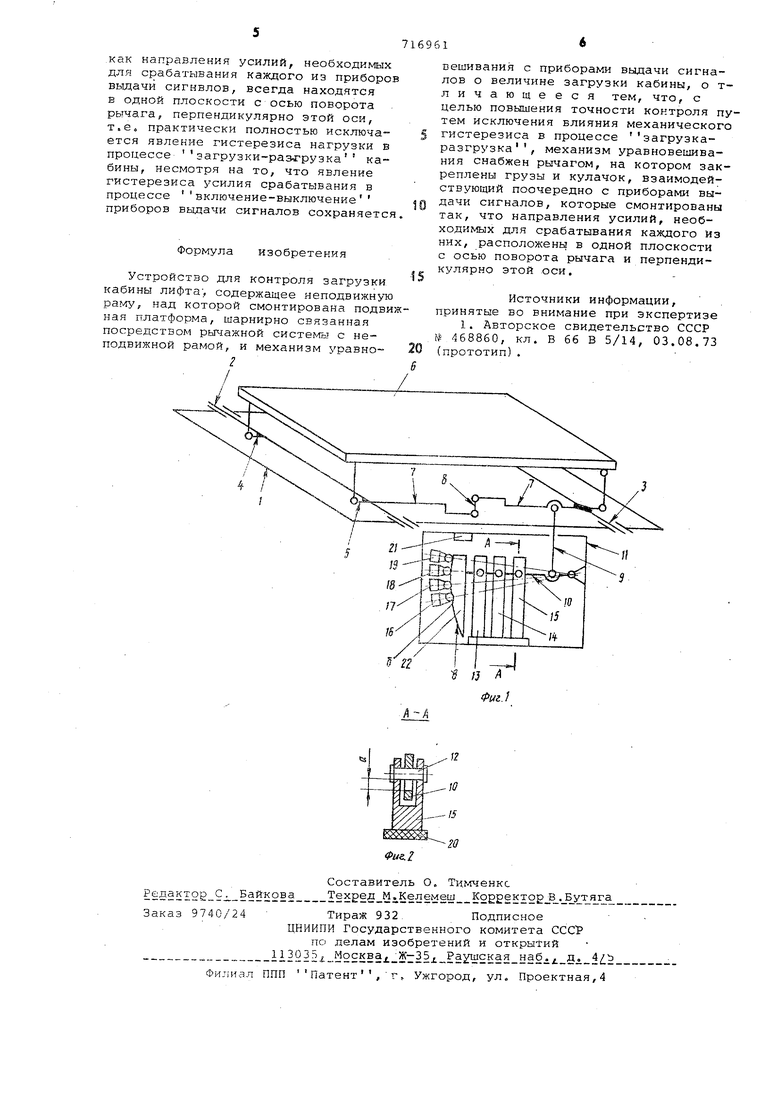
На фиг. 1 схематично изображен обший вид устройства; на фиг. 2 - разрез по А-А соединения рычага с одним из уравновешивающих грузов.
Устройство содержит неподвижную раму I, на которой шарнирно установлены валы 2 и 3, каждый из которых снабжен двумя короткими рычагами 4 и 5, на которые шарнирно опирается вертикально подвижная платформа 6, и одним длинным рычагом 7. Концы
рычагов 7 зарнирно соединены собой посредством серьги 8, Один из рычагов 7 с помощью тяги 9 шарнирно связан с рычагом 10 механизма уравновешивания и выдачи сигналов, выполненного в виде отдельного блока заключенного в корпус 11. Рьгчаг 10, шёрнирно закрепленный в корпусе 11,, подвижно соединен посредством осей 12 с уравновешивающими грузами 13, 14 и 15, расположенными под этим рычагом, вдоль его оси. В корпусе; 11 неподвижно закреплены приборы выдачи сигналов 16, 17, 18 и 19 число которых выбирается в зависимости от требуемого числа сигналов о величине загрузки кабины. В соединениях рьтчагф 10 с уравновешивающими грузами 13, 14 и 15 имеются зазоры а (фиг.2 которые предназначены для обеспечения поочередного подъема уразновешлвающих грузов и срабатывания приборов выдачи сигналов в заданной последовательности. Уравновешивающие грузы 13, 14 и 15 опираются на упоры 20 Для ограничения поворота рьгаага 10 при максимальной загрузке кабин;а над его концом закреплен упор 21, На свободном конце рычага 10 закреплен кулачок 22, имеющий скос б для неп©средственного воздействия на при-бфры выдачи сигналов и поверхносгь в которая описана радиусом из центр совпадающего с осью поворота, рэ.чага 10, и предназначена для удёржани; приборов выдачи сигналов во зклюЧ:;е:-1 ном положении после их сраба.тынамия в процессе загрузки кабиньь При этом приборы выдачи сигналов 16,, 17, 18 и 19 установлены так, что направления усилий Keo6xoAHivi;ax для срабатывания каждого из них, расположены в одной плоскости с осью поворота рычага 10 и перпендикулярно эт.ой оси. Кулачок 22 одновременнсз является управновешивающим грузом для первой точки контроля загруз1и кабины. Массы уравновешивающих грузов 13, 14 и 15 и кулачка 22 подобраны так, что для срабатывания каждого из приборов выдачи сигналов 16, 17, 18 и 19 необходимо приращение загрузки кабины лифта, постаточное для подъема соответствующего уравновешивающего груза.
Устройство работает следующим образом.
В;исходном положении, при незагруженной кабине, уравновешиваюш.з:е грузы 13, 14, 15 опираются на 20, рычаг 10 лежит на осях 12, сое.циняющих его с уравновешивающими грузами, а штоки приборов выдачи сигналов 16, 17, 1.8 и ХЭ не нажаты. При загрузке кабины, Kak только величина ее достигнет значения, соответству:ющего первой точке фиксации загрузки подвижная платформа 6 начинает опускаться, валы , и J вместе с рычагаг-.Ш 4, 5 и 7 поворачиваются так, что концы рычагов 7 и серьгс 8 поднимаются., увлекая за собой через тягу 9 рычаг 10 механизма уразнсвешивания и выдачи сигналов вместе с кулачком 22- являющимся уравнсвешкЕаг-ошим грузом первой точки контроля загрузки. Поворот рычага iO прекратится, как только полностью Еыберстсл зазор в соединении рычага 10 с уравновешиваюшим грузом 13 зторой ТОЧКИ биксации загрузки ,, К этому моменту скос б кулачка 22 включит прибор выдачи сигналов 16, который выдаст в систему управления ли(Ьтом э.пектрический сигнал о том, то ва.пичина загрузки кабины дости1ла знэ/ -тения, соответствующего первой точке контроля загрузки, а шток :pi- 6o;;a ока51(етсл на поверхности в кулачка 22, которая удерживает прибор выдло-чи сигналов во включенном )7оложенки при всех величинах загрузки тсабины,
превшпающих ту, при ;:оторсй зтот
прибор выдачи скгна;1ов срзбот л. При увеличении загрузки кабинь- к достиясении величины, соотзетствугющей второй точке контроля загрузки,- свободнь -( овеи рычага 10 вместе с j-сулачкем 22 и уравновешивз-птим гоузок i3 снова начнет подниматься. Поворот рычага 10 прекратится, как только 1 олкост:ью внберется зазор Е сосдиненик 10 с уразновегливЕГоюим грузом J - третьей точки кочтгогк ки кабиньо К этому мо - ент/ 5 кулачка 22 включит прибор :5Ь; ачи сигналов 17, которай выдаст в систем упразления лифток электоичесхий с/ггнал о том, что вели;- и-;а 33:гоуз: к кабины дост;-п:м а второй /tji--кг.;- ког тролв загрузки,, а шток прибора 17, как и :рибор.а 16,, окажется на. по.Зерхности в ку;::ачка 22, Таким же образом при дальнейшей загрузке кабкнк сработают - н приборы выдачи сигналов 38 и 19 и вндадут в систему у|трав7гекия JIHCOTOM сигналы о ТОМ;, что величина загрузхи кабины достигла значений, ооответствующих т ре т ье-.и и четвертой j очек контроля загрузки При зто по-воротрьгчагс . О прекратит :я г как только по.лчостью выберется зазор между KVjLa4KOM 22 и упором 21, При разгрузке кабины процесс работы пола будет iiDoксходить Б обратной последдователы оси при полной разгрузке see.его элеметы возвратяток в иохолвое положение.
Уменьшение влияния гистерезиса нагрузки я процессе загрузка-разгрузка кабины обеспечивается -ем, что,, благодаря указанному ньше paarieщению приборов выдачи сигналов, на рычаге механизма уравновегпиэания л выдачи сигналов не возникает Г1егэе-менный крутящий момент относительно оси поворота рычага,, о.трицательно влияющим на точностч, работы пола,так как направления усилий, необходимых для срабатывания каждого из приборо выдачи сигнвлов, всегда находятся в одной плоскости с осью поворота рычага, перпендикулярно этой оси, т.е. практически полностью исключается явление гистерезиса нагрузки в процессе эагрузки-раэогрузка кабины, несмотря на то, что явление гистерезиса усилия срабатывания в процессе включение-выключение приборов выдачи сигналов сохраняетс Формула изобретения Устройство для контроля загрузки кабины лифта, содержащее неподвижную patAy, над которой смонтирована подви ная платформа, шарнирно связанная посредством рычажной системы с неподвижной рамой, и механизм уравно/вешивания с приборами выдачи сигналов о величине загрузки кабины, о тличающееся тем, что, с целью повышения точности контроля путем исключения влияния механического гистерезиса в процессе загрузкаразгрузка, механизм уравновешивания снабжен рычагом, на котором закреплены грузы и кулачок, взаимодействующий поочередно с приборами выдачи сигналов, которые смонтированы так, что направления усилий, необходимых для срабатывания каждого из них, расположены в одной плоскости с осью поворота рычага и перпендикулярно этой .оси. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № leSSeO, кл. В 66 В 5/14, 03.08.73 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения загрузки кабины лифта | 1978 |
|
SU779231A1 |
| Устройство для автомтического контроля загрузки кабины лифта | 1977 |
|
SU659502A1 |
| Устройство для контроля загрузки кабины лифта | 1980 |
|
SU943164A1 |
| Устройство для автоматического контроля загрузки кабины лифта | 1977 |
|
SU650935A1 |
| Устройство для автоматического контроля загрузки кабины лифта | 1973 |
|
SU468860A1 |
| Устройство для автоматического контроля загрузки кабины лифта | 1977 |
|
SU638530A1 |
| Устройство для контроля загрузки кабины лифта | 1979 |
|
SU872423A1 |
| Устройство для контроля загрузки кабины лифта | 1990 |
|
SU1717514A1 |
| Устройство для контроля загрузкиКАбиНы лифТА | 1979 |
|
SU852753A1 |
| Устройство для контроля загрузки кабины лифта | 1979 |
|
SU856960A1 |
