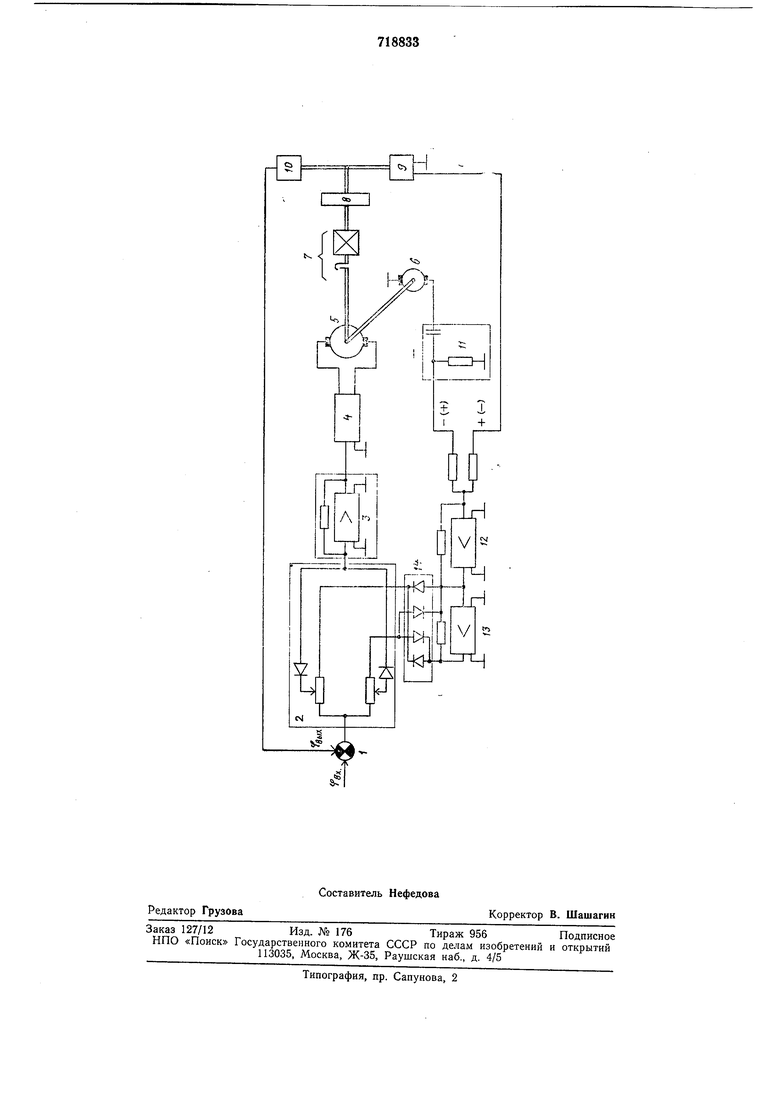
исполнительный двигатель 5, тахогенератор 6, механическую нередачу 7 с люфтом, объект 8, датчик 9 ускорения, датчик 10 угла, дифференцирующее звено 11, масштабирующий усилитель 12, инвертор 13, выпрямитель 14.
Работает следящая система следующим образом.
Сигнал ощибки, выделяемый блоком 1 формирования сигнала ошибки, как разность входного (фвх) и выходного (фвых)
углов поступает на вход звена 2 типа «зона нечувствительности. Далее сигнал ошибки через предварительный усилитель 3 и усилитель 4 мощности подается на исполнительный двигатель 5, который через механическую передачу 7, имеющую люфт, поворачивает объект 8 на требуемый угол, измеряемый датчиком 10.
Если люфт выбран и вал двигателя через механическую передачу сцеплен с валом объекта, ускорение объекта и приведенное к нему ускорение вала двигателя равны При этом следящая система эквивалентна системе с механической передачей без люфта. Сигналы с датчика 9 углового ускорения и дифференцирующего звена И, подаваемые на масштабирующий усилитель 12, противоположны по знаку и одинаковы по величине. Сигналы с выходов масштабирующего усилителя 12 и инвертора 13 равны нулю, при этом щирина зоны нечувствительности также равна нулю. Величина ошибки определяется статическими и динамическими свойствами следяшей системы. Приведенные процессы аналогичны и для системы, находящейся в состоянии покоя.
В случае, если люфт не выбран и вал двигателя вращается в зазоре, ускорение вала объекта и двигателя различны и, следовательно, на выходах масштабирующего усилителя 12 и инвертора 13 появляются равные по величине и противоположные по знаку сигналы, которые используются в качестве опорных, устанавливая зону нечувствительности, по ширине пропорциональную разности ускорений двигателя и объекта. До тех пор, пока вал двигателя вращается в люфте, будет существовать зона нечувствительности. Максимальная ширина ее выбирается из условий подавления автоколебаний, обусловленных наличием люфта в механической передаче./-. Описываемая следящая система выгодно отличается от известных, так как уменьшение ошибки не связано со значительными усложнениями следящей системы. Кроме того, выработка сигнала коррекции ширины зоны нечувствительности производится ав-: томатическй, что улучшает эксплуатационные характеристики.
Формула изобретения
Следящая система, содержащая последовательно соединенные блок формирования
сигнала ошибки, звено типа «зона нечувствительности, предварительный усилитель, усилитель мощности, исполнительный двигатель, вал которого связан с тахогенератором и через механическую передачу с
люфтом - с объектом, на выходном валу которого установлен датчик ускорения, и датчик угла, выход которого подключен к входу блока формирования сигнала ошибки, отличающийся тем, что, с целью
повышения точности системы, в нее введены дифференцирующее звено и последовательно соединенные масштабирующий усилитель, инвертор и выпрямитель, выходы которого подключенык второму и третьему
входам звена типа «зона нечувствительности, а входы масштабирующего усилителя соединены с выходом датчика ускорения и дифференцирующего звена, вход которого подключён к выходу тахогенератора.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 392452, кл. G 05В 11/00, 1974.
2.Рабинович Л. В. и др. Проектирование следящих систем. М., «Машиностроение,
1969, с. 286-295 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1981 |
|
SU993202A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1970 |
|
SU1839997A1 |
| Следящая система | 1982 |
|
SU1109711A1 |