1
Изобретение относится к области автоматизации л исто-штамповочного производства и может быть использо вано для захватадетали типа стакана, отделения плоской заготовки от стопы и подачи ее в рабочую зону штампа, удаления деталей и кольцевых отходов из рабочей зоны штампа.
Известен захватный механизм манипулятора, содержащий закрепленные на кисти руки манипулятора подвижные одна относительно другой захватные губки для захвата деталей типа стакана l .
Целью изобретения является обе спечение возможности надежного захвата и одновременного захвата деталей типа стакана и плоских заготовок или отходов.
Поставленная цель достигается тем что предлагаемый захватный механизм снабжен электромагнитами, попарно закрепленными на каждой из захватных губок, сердечник каждого электромагнита выполнен С-образным, ось обмотки каждого из электромагнитов расположена параллельно плоскости перемещения одной захватной губки относительно другой, а на сердечнике каждого из электромагнитов закреплен датчик контроля наличия плоских заготовок или отходов, расположенный между концами сердечника. Захватный механизм может быть снабжен датчиком контроля наличия деталей типа стакана, закрепленным на одной из захватных губок с возможностью взаимодействия с другой захватной губкой.
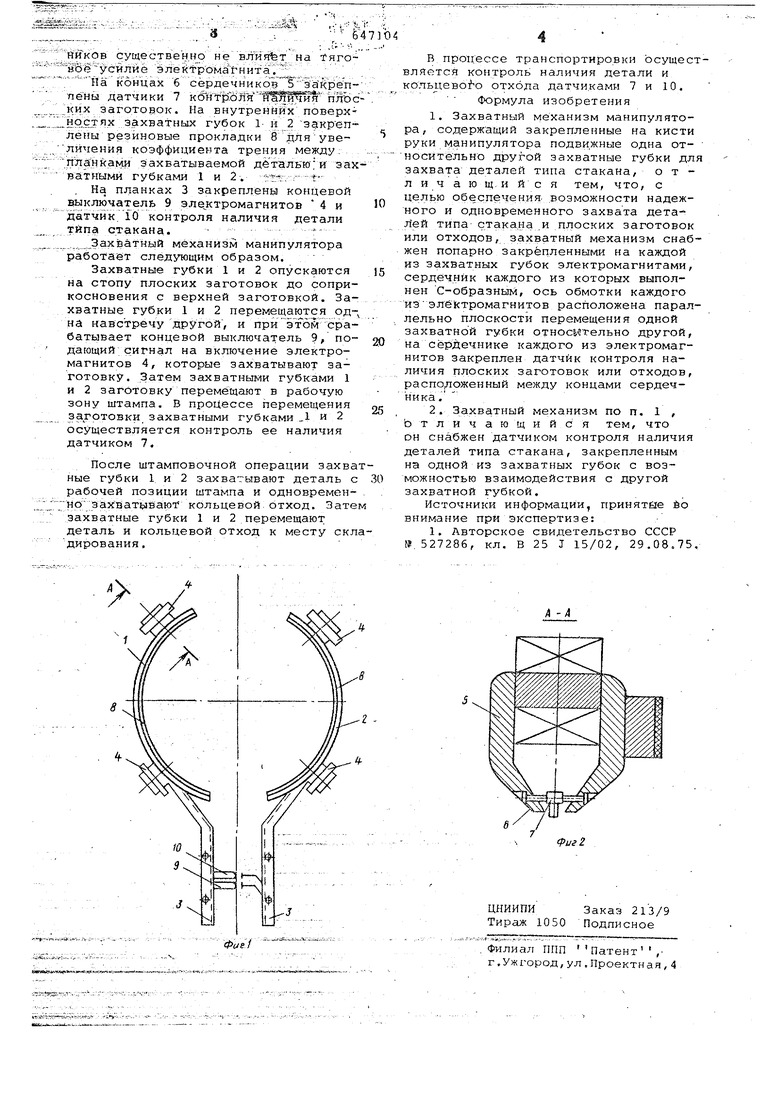
На фиг. 1 изображен предлагае(«ий захватный механизм, общий вид; на фиг. 2 - разрез по А-А на фиг. 1.
Захватный механизм манипулятора содержит захватные губки 1 и 2, закрепленные на кисти руки манипулятора (не показаны) при помощи планок 3, На захватных губках 1 и 2 попарно установлены электромагниты 4-. Сердечник 5 каждого из электромагнитов 4 выполнен С-образным. Такая форма сердечников 5 электромагнитов 4 позволяет получить градиент магнитного поля, который обеспечивает высокую напряженность магнитного поля в малом объеме, что позволяет надежно удержив.ать заготовки, а при отделе- НИИ плоской заГотовкР1 от стопы предотвращает захват нижележащей заго-. товки. Качество поверхности плоских заготовок при выбранной форме серлсч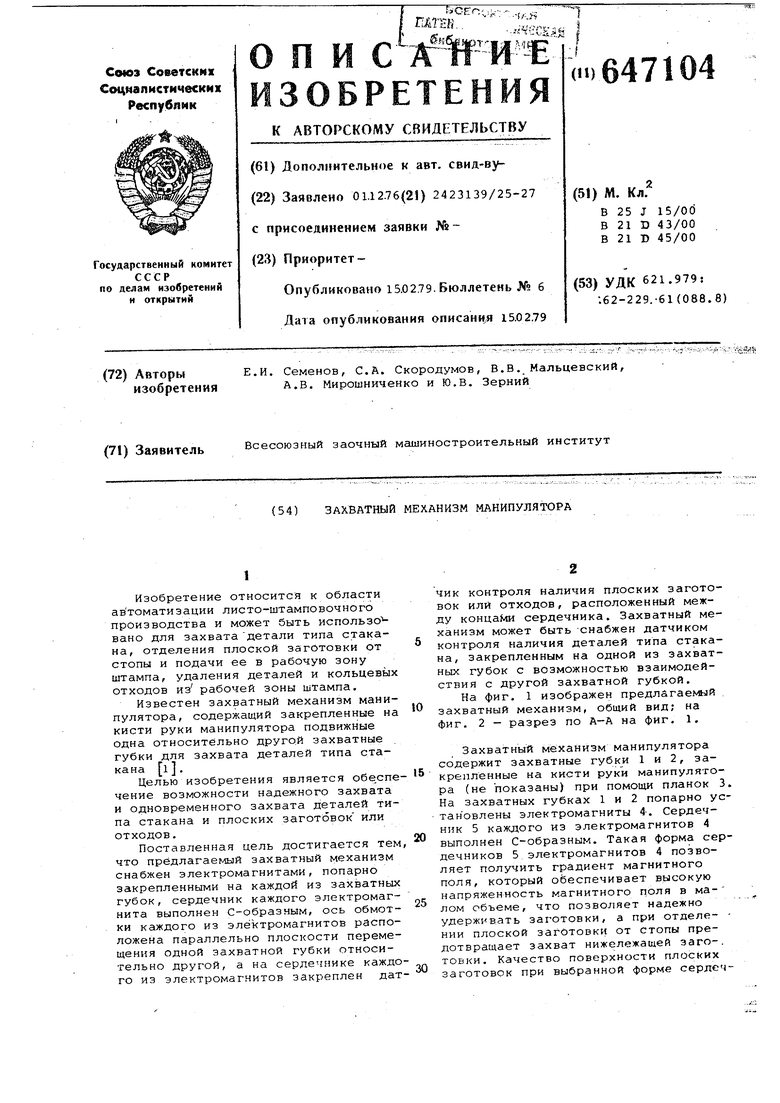
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный орган манипулятора | 1977 |
|
SU721324A1 |
| Устройство для управления схватом промышленного робота | 1980 |
|
SU894666A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
