(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным роботом | 1976 |
|
SU704774A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |

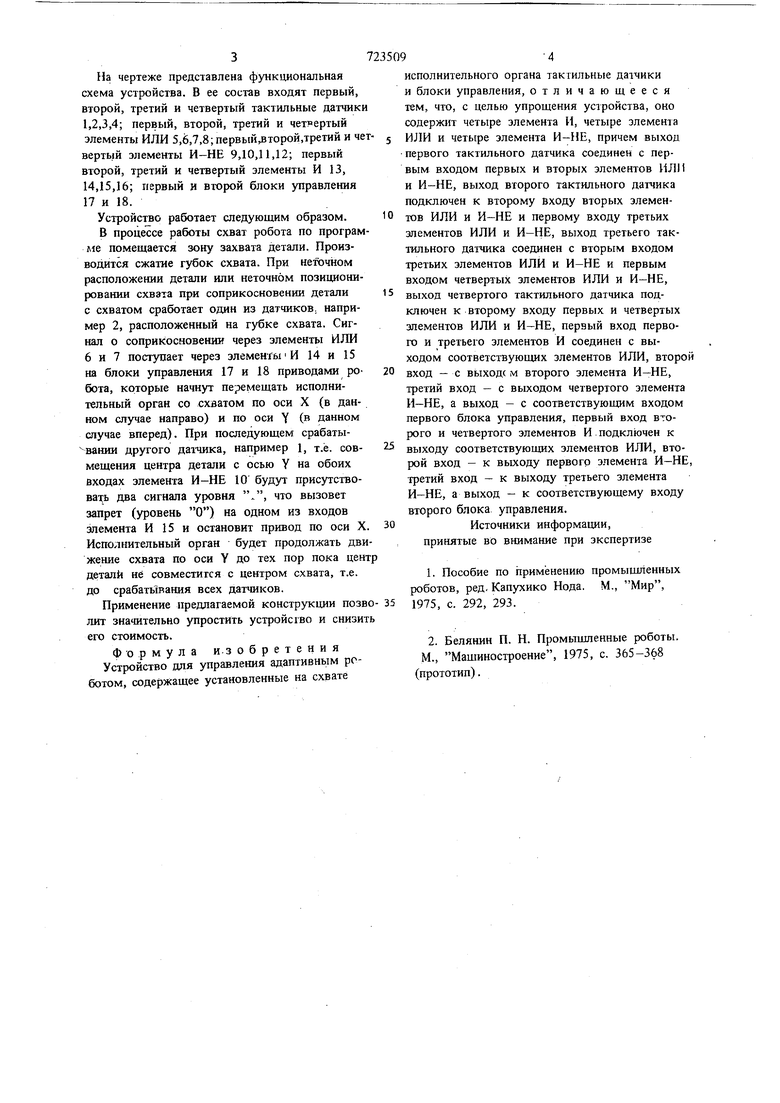
Изобретение относится к робототехнике и может быть использоварю при создании систем управления адаптивным роботом. Известно устройство для управления адаптив роботом, содержащее исполнительный орган робота с установленными на его схвате тактильными датчиками и управляющую вычислительную мапшну 1. Устройство имеет сложную конструкцию.. Наиболее близким техническим решением к изобретению является устройство, содержащее установленные на схвате исполнительного органа так1ильныс датчики, блоки управления и управляющую вычислительную машину 21. Это устройство управляется вычислительной машиной и поэтому является сложным и имеет длительный процесс совмещения центра схв та с центром детали. Целью изобретения является упрощение устройства. Это достигается тем, чю устройство содержит четыре элемента И, четыре элемента ИЛИ и чепугре элемента И-НЕ, причем первого такти-чьного датчика соединен с первым входом первых и вторых элементов ИЛИ и И-НЬ, выход второго тактильного датчика подключен к второму входу вторых элементов ИЛИ и М- НЕ и первому входу третьих элементов ИЛИ и И-НЕ, выход третьего, тактильного датчика соединен с вторым входом ipeтьих элементов И.ПИ и И-НЕ и первым входом четвертых элементов ИЛИ и И-НЕ, выход четвертого тактильного датчика подключен к второму входу первых и четверт1)1х элементов ИЛИ и И-НЕ, первый вход первого и третьего элементов И соединен с выходом соответствующих элементов ИЛИ, второй вход - с выходом второго элемента , третий вход с выходом четвертого элемента И-НЕ, а выход - с соответствующим входом первого блока управления, первый вход второго и четвертого элементов И подключен к выходу соответствующих элемента ИЛИ, второй вход - к выходу первого элемента И-НЕ, третий вход - к выходу третьего элемента И-НЕ, а выход - к соответствующему входу второго блока управления. 3 На чертеже представлена функциональная схема устройства. В ее состав входят первый, второй, третий и четвертый тактильные датчик 1,2,3,4; первый, второй, третий и четвертый элементы ИЛИ 5,6,7,8 ;первыйзторой,третий и че вертый элементы И-НЕ 9,10,11,12; первый второй, третий и четвертый элементы И 13, 14,15,16; первый и второй блоки управления 17 и 18. Устройство работает следующим образом. В процессе работы схват робота по програм ме помещается зону захвата детали. Производится сжатие губок схвата. При неточном расположении детали или неточном позиционировании схвата при соприкосновении детали с схватом сработает один из датчиков, например 2, расположенный на губке схвата. Сигнал о соприкосновении через элементь ИЛИ 6 и 7 поступает через элементыИ 14 и 15 на блоки управления 17 и 18 приводами робота, которые начнут перемещать исполнительный орган со схватом по оси X (в данном случае направо) и по оси Y (в данном случае вперед). При последующем срабаты вании другого дат-чика, например 1, т.е. совмещения центра детали с осью Y на обоих входах элемента И-НЕ 10 будут присутствовать два сигнала уровня ., что вызовет запрет (уровень О) на одном из входов элемента И 15 и остановит привод по оси X Исполнительный орган будет продолжать дви жение схвата по оси Y до тех пор пока цен детали не совместится с центром схвата, т.е. до срабать вания всех датчиков. Применение предлагаемой конструкции позв лит значительно упростить устройсгво и снизит его стоимость. Формула изобретения Устройство для управления адаптивным роботом, содержащее установленные на охвате исполнительного органа тактильные даиики и блоки управления, отличающееся тем, что, с целью упрощения устройства, оно содержит четыре элемента И, четыре элемента ИЛИ и четыре элемента И-НЕ, причем выход первого тактильного датчика соединен с первым входом первых и вторых элементов ИЛИ и И-НЕ, выход второго тактильного датчика подключен к второму входу вторых элементов ИЛИ и И-НЕ и первому входу третьих элементов ИЛИ и И-НЕ, выход третьего тактильного датчика соединен с вторым входом третьих элементов ИЛИ и И-НЕ и первым входом четвертых элементов ИЛИ и И-НЕ, выход четвертого тактильного датчика подключен к второму входу первых и четвертых элементов ИЛИ и И-НЕ, первый вход первого и третьего элементов И соединен с выходом соответствующих элементов ИЛИ, второй вход - с вь1ход( м второго элемента И-НЕ, третий вход - с выходом четвертого элемента И-НЕ, а выход - с соответствующим входом первого блока управления, первый вход второго и четвертого элементов И подключен к выходу соответствующих элементов ИЛИ, второй вход - к выходу первого элемента И-НЕ, третий вход - к выходу третьего элемента И-НЕ, а выход - к соответствующему входу второго блока управления. Источники информации, принятые во внимание при экспертизе 1.Пособие по применению промышленных роботов, ред, Капухико Нода. М., Мир, 1975, с. 292, 293. 2.Белянин П. Н. Промыщленные роботы. М., Машиностроение, 1975, с. 365-368 (прототип).
