1
Изобретение относится к захватным устройствам роботов и манипуляторов.
Известно захватное устройство, в котором контролируется прворот губок относительно оси шарнира, т. е. осуществляется пассивный контроль захвата изделия 1.
Недостатком известного захватного устройства является ненадежность в работе, так как может произойти излом одной из губок и при этом поступит ложный сигнал в систему управления о захвате изделия. .
Предлагаемое захватное устройство с целью повышения надежности захвата снабжено лепестками и конечным выключателем, контактные элементы установлены в зоне соприкосновения губок с захватываемой деталью, причем каждый контактный элемент и конечный выключатель электрически связаны с системой управления, срабатываюш,ей после получения суммарного сигнала от контактных элементов и конечного выключателя.
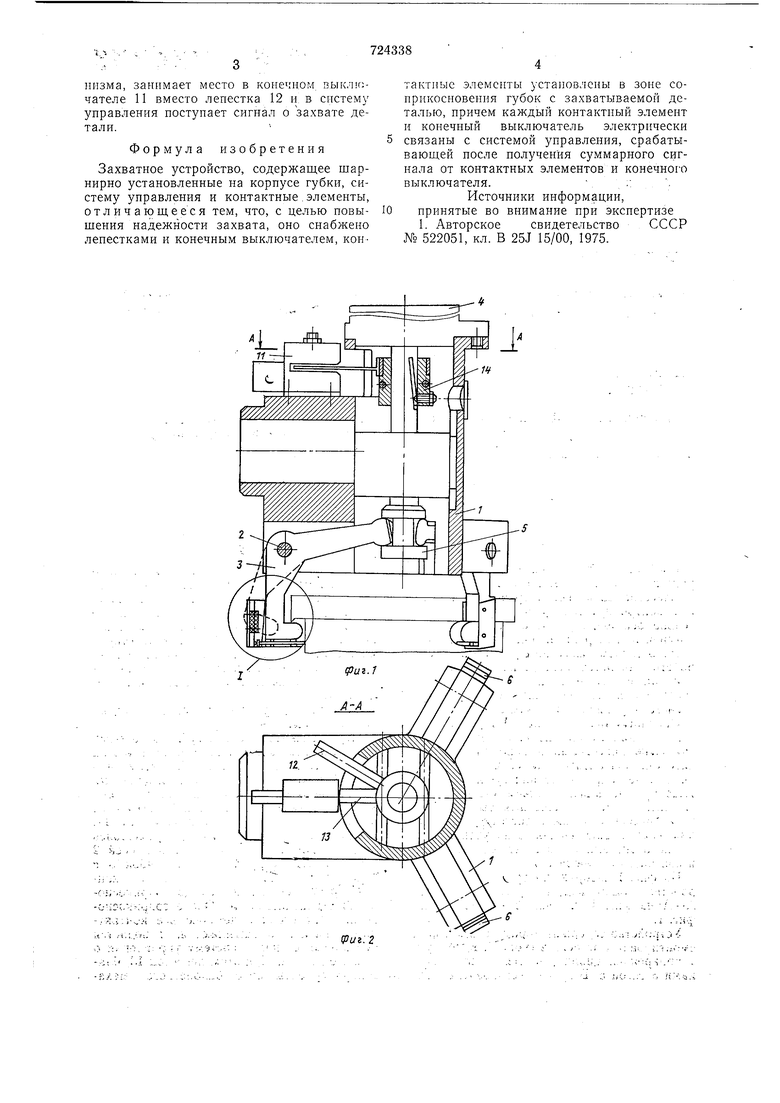
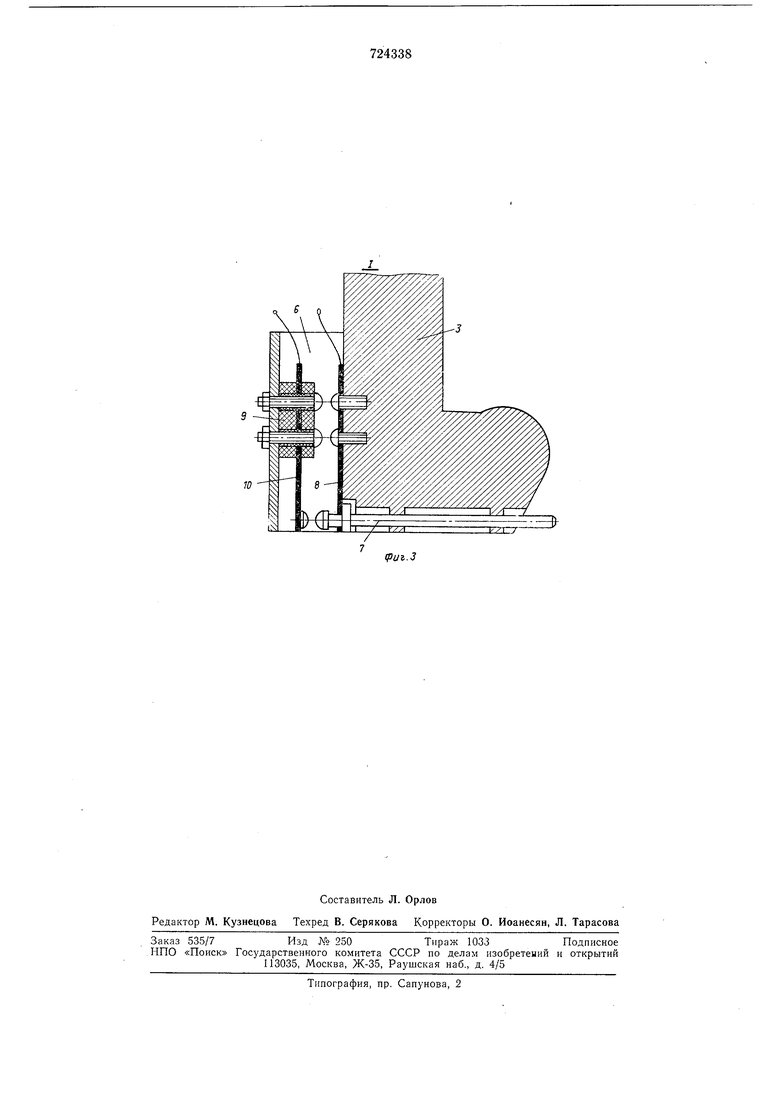
На фиг. 1 изображено предлагаемое устройство, обш;ий вид; на фиг. 2 ;- разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 1. Устройство содержит корпус 1, в котором смонтированы на осях 2 губки 3. К корпусу 1 прикреплен цилиндр 4, связанный с губками 3 тягой 5. В губках установлены контактные элементы 6, состоящие из установленных в отверстиях губок подвижных контактов 7, связаннцх пружиной 8, и изоляторов 9, и которых закреплены пружинные контакты 10. На корпусе 1 закреплен конечный выключатель 11, взаимодействующий с лепестками 12 и 13, получающими вращение от байонетного механизма 14, установленного на тяге 5 и связанного с корnycoiM 1.
Захватное устройство работает следующим образом.
Перед захватом детали губки 3 находятся в исходном положении. Это показано на
фиг. 1 штриховой линией. При этом контакт 7 находится в крайнем выдвинутом пружиной 8 положении, контактный элемент 6 разомкнут, а лепесток 12 находится в контакте с конечцым выключателем И.
При захвате детали тяга 5, перемещаясь вверх, поворачивает относительно осей 2 губки 3. При соприкосновении губок 3 с деталью последняя, взаимодействуя с контактами 7, перемещает их до соприкосновения с контактами 10. После соприкосновения всех губок с деталью все контактные элементы 6 замыкаются, и подается суммарный сигнал в систему управления о захвате детали. При этом лепесток 13, благодаря срабатыванию байонетного мехаиизма, занимает место в г оиечном выклк;чателе И вместо лепестка 12 и в систему управления поступает сигнал о захвате детали.
Формула изобретения
Захватное устройство, содержащее niapнирно установленные на корпусе губки, систему управления и контактные.элементы, отличающееся тем, что, с целью повышения надежности захвата, оно снабжено лепестками и конечным выключателем, контактные элементы установлены в зоне соприкосновения губок с захватываемой деталью, причем каждый контактный элемент и конечный выключатель электрически
связаны с системой управления, срабатывающей после получения суммарного сигнала от контактных элементов и конечного выключателя..:
Источники ннформацнн,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 522051, кл. В 25J 15/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| Захватное устройство | 1979 |
|
SU810478A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Схват | 1983 |
|
SU1119842A1 |
риг:2
z сриг.З
