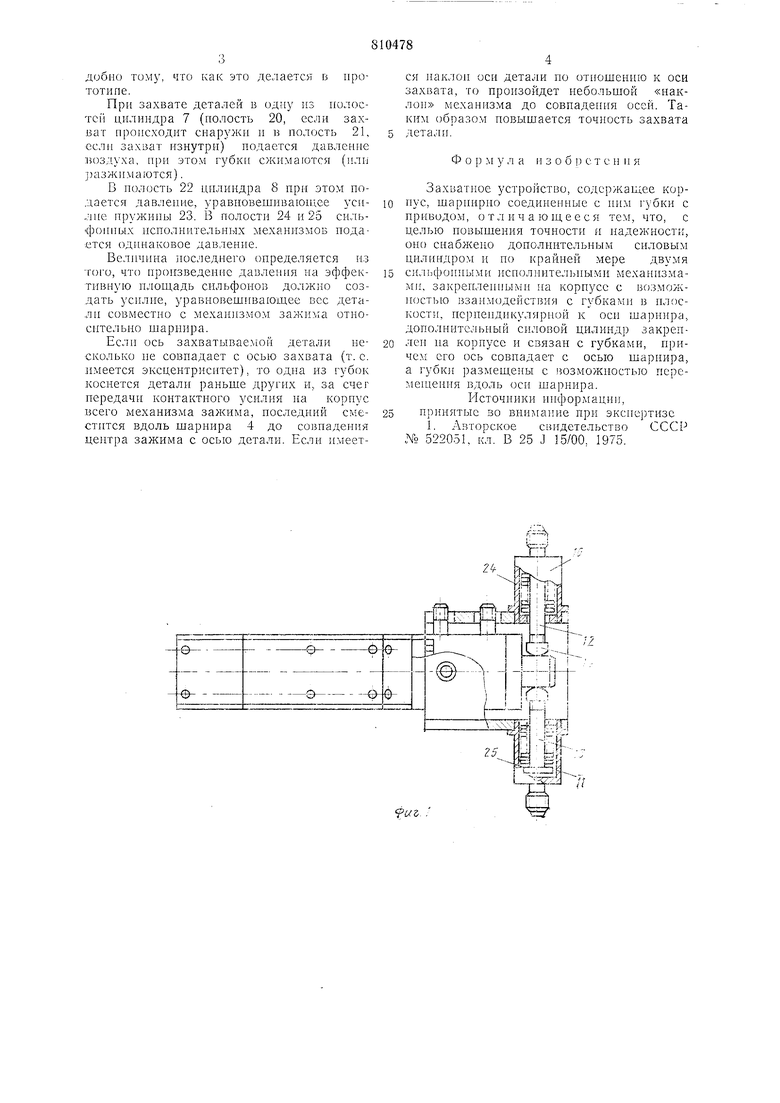
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов и промышленных роботов, применяемых для обслуживания металлообрабатываюш,их станков с программным управлением. Известно захватное устройство, содержащее корпус, шарнирно соединенные с ним губки с приводом 1. Однако известное устройство не обеснечивает необходимой точности и обладает низкой надежностью. Цель изобретения - повышение точности и надежности. Цель достигается тем, что захватное устройство снабжено дополнительным силовым цилиндром и по крайней мере двумя сильфонными исполнительными механизмами, закрепленными на корпусе с возможностью взаимодействия с губками в нлоскости, перпендикулярной оси шарнира, дополнительный силовой цилиндр закреплен на корпусе и связан с губками н его ось совпадает с осью шарнира, а губки размешены с возможностью перемещения вдоль оси шарнира. На фиг. 1 изображено предлагаемое устройство, вид сбоку; на фиг. 2-то же, вид в плане. Захватное устройство содержит корпус 1, прикрепляемый фланцем 2 к предыдущим звеньям манипулятора. При помощи шарниров (серьги 3, За, полуоси 4, 4а) платформа 5 соединена с корпусом 1. На платформе смонтирован шарнирный механизм 6 зажима губок с приводом от силового цилиндра 7. На корпусе 1 закреплен цилиндр 8. Одна полуось 4 шармира соединена с подпружиненным поршнем 9 цилиндра 8. Ход штока цилиндра 8 соответствует зазору в (см. фиг. 2)-максимальному расчетному эксцентриситету оси детали но отношению к базовой поверхности. На противоположных сторонах корпуса установлены снльфонные исполннтельные механизмы 10 и И, штоки 12 н 13 которых упираются с противоположных сторон платформы, в описываемом варианте - в корпус силового цилиндра, жестко прикрепленного к платформе 5. Длина штоков может быть отрегулирована с помощью гаек 14. На ось 15 рычага губки надет контактный элемент 16 со штырем 17, который воздействует на выключатели 18 н 19, связанные с системой управления, сигнализируя о биении детали в патроне, подобно тому, что как это делается в прототипе. При захвате деталей в одну из полостей цилиндра 7 (полость 20, если захват происходит снаружи и в полость 21, если захват изнутри) подается давление воздуха, при этом губки сжимаются (или ;разжимаются). В полость 22 цилиндра 8 при этом подается давление, уравповешивающее усилие пружины 23. В полости 24 и 25 сильфонпых исполнительных механизмов подается одинаковое давление. Величина последнего определяется из того, что произведение давления на эффективную плош,адь сильфопов должно создать усилие, уравновешивающее вес детали совместно с механизмом зажима относительно шарнира. Если ось захватываемой детали несколько не совпадает с осью захвата (т. е. имеется эксцентриситет), то одна из губок коснется детали раньше других и, за счет передачи контактного усилия иа корпус всего механизма зажима, последний сместится вдоль шарнира 4 до совпадения центра зажима с осью детали. Если имеет81045 10 15 20 25 8 ся наклон оси детали по отношению к оси захвата, то произойдет небольшой «наклон механизма до совпадения осей. Таким образом повышается точность захвата детали. Формула изобретения Захватное устройство, содержащее корпус, шарнирно соединенные с ним губки с приводом, отличающееся тем, что, с целью повышения точности и иадежности, оно снабжено дополнительным силовым цилиидром н по крайней мере двумя сильфонными исполнительными механизмами, закреплеппыми на корпусе с возможностью взаимодействия с губками в плоскости, перпендикулярной к оси шарнира, дополнительный силовой цилиндр закреплен на корпусе и связан с губками, причем его ось совпадает с осью шарнира, а губки размещены с возможностью перемещения вдоль оси шарнира. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 522051, кл. В 25 J 15/00, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1430261A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Захват | 1980 |
|
SU885001A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Захватное устройство | 1977 |
|
SU662342A1 |

//
f(/5.
W 15
/5 /Г
