(54) МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаватора | 1980 |
|
SU899802A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаватора | 1981 |
|
SU1004549A1 |
| УСТРОЙСТВО К МЕХАНИЗМУ ШАГАНИЯ | 1970 |
|
SU258931A1 |
| Подвеска рабочего органа одноковшового экскаватора | 1985 |
|
SU1377337A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Механизм шагания экскаваторов | 1974 |
|
SU631610A1 |
| Ходовой механизм | 1974 |
|
SU609892A2 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Шарнирный узел для крепления гидроцилиндра | 1989 |
|
SU1701579A1 |
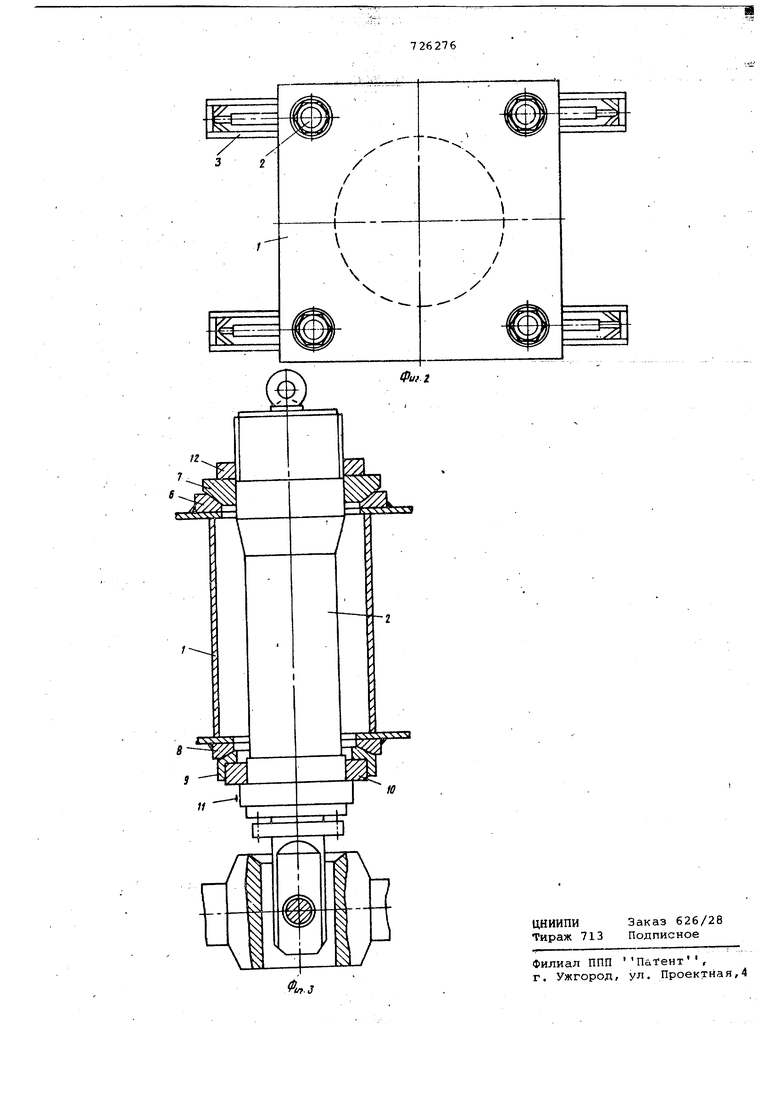
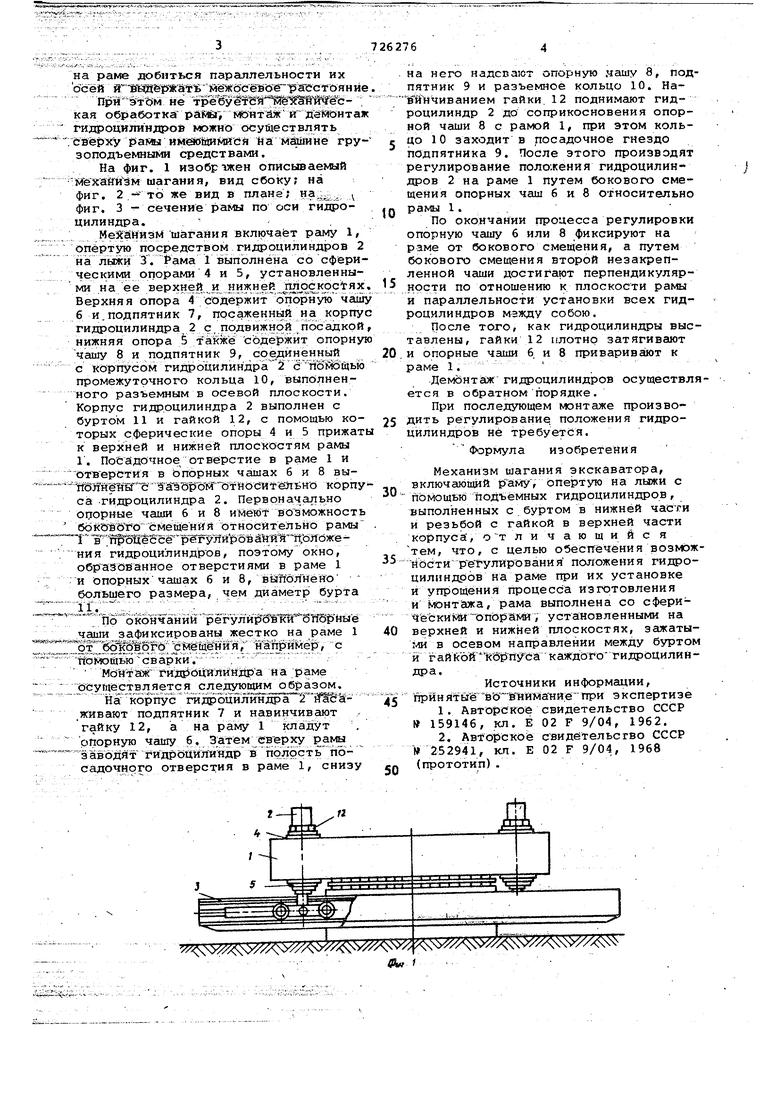
Изобретение относится к горному и строительному мгиииностроёнию и может быть использовано, в частности в механизмах шагания экскаваторов. Известен механизм шагания экскава тора, содержащий раму с жестко закрепленными на ней четырьмя подъемными гидроцилиндрами 1. Недостаток известного механизма заключается в том, что он исключает возможность регулирования положения гидроцилиндров относительно рамы в процессе монтажа. Известен механизм шагания экскаватора, включающий раму, опертую на лыжи с помощью подъемных гидроцилиндров, выполненных с буртом в нижней части и резьбой с гайкой в верхней части корпуса 2. Недостаток этого механизма заключается в том, что он не позволяет осуществлять регулирование положения гидроцилиндров при их установке на. раме, вследствие чего оси их могут быть непараллельными. Кроме того, для расточки посадочных отверстий в раме требуются уникальные расточные станки, средства транспортирования к станку, грузоподъемные ьюханизь«, а для установки гидроцилиндров на монтажной площадке необходимо устраивать специальные приямки для них. Цель изобретения - обеспечение возможности регулирования положения гидроцилиндров на раме при их установке и упрощение процесса изготовления и монтажа. Поставленная цель достигается тем, что рама выполнена со сферическими опорами, установленными на ее верхней и нижней плоскостях, зажатыми в осевом направлении между буртом и гайкой корпуса каждого гидроцилинДРаПосле завершения процесса регулирования положения гидроцилин 1ров относительно рамы опорные чаши сферических опор жестко фиксируются на раме, чем исключается возможность смещения сферических опор в боковом направлении. Подпятник верхней сферической опоры посажен на корпус гидроцилиндра без бокового зазора, а подпятник нижней опоры посредством промежуточного кольца, выполненного разъемным в осевой плоскости. Такое конструктивное выполнение позволяет при установке гидроцилиндров на раме добиться параллельности их с(сёй й Тв|Вдё|$«а « й1ёжесШ«ё--ра с гоян не тре&у-ттгштштёкая обработка-раКй i Htai-й-д Шнт можнй осуществлять Ьйёрху рамы им оййМйЬя Ма йаайне гр зоподъемными средствами. На фиг. 1 изображен описываемый мехаййзм шагаиия, вид сбоку; на фиг. 2 -То же вид в плане; на,,, , фиг. 3 сечение ра1чы по оси гЙдроцилиндра., . шагания включает раму I ,...- .опертую посредством гидроцилиндров на льЕки 3. Рама 1 выполнена со сфери . вескими опорами 4 и 5, установленны , ми на ее верхней .и нижней И Ъскостя Верхняя опора 4 содержит огюрную ча б и подпятник 7, посаженный на корп гидроцилиндра 2 с,подвижной посадко нижняя опора 5 такжё сЬдёржйт опорн чашу 8 и подпятник 9, соедйн енный с корпусом гидроцилиндра 2 cW6 промежуточного кольца 10, выполненного разъемным в осевой плоскости. Корпус гидррцилиндра 2 выполнен с буртом 11 и гайкой 12, с помощью ко торых сферические опоры 4 и 5 прижат к верхней и нижней плоскостям рамы 1. Пойадочное отверстие в раме 1 и L . Опорных чашах б и 8 вы овЗ йеныс§азШ 6 бтйос«тёЛЬно корпу са -гидроцилиндра 2. Первоначально Опорные чаши 6 и 8 ийёют возможность бокЬШгЬ смещения относительно рамы Т -вГ :1fфШtggrWгy5 йf:)Шafrlrй JToжё . ния гидроцилиндр-ОБ, поэтому окно, образованное отверстиями в раме 1 ;; и Опорныхчашах 6 и 8, вйШлнёйо большего размера, чем диаметр бурТа По окончании pёгyлиpdв й aгfopныё „ чаши а фиксированы жестко на раме 1 „ от.боковЬгб смещения, например, с помощьюевар1 и. Монтаж гидроцилиндра на раме осуществляется следующим образом. На корпус гидроцйлйндаТ 2 й1&М.живают подпятник 7 и навинчивают гайку 12, а на раму 1 кладут опорную чашу б. Затем isBepJcy рамы эаводят гидроЦйЛййдр в полость по- садочного отверстия в раме 1, снизу на него надевают опорную .чашу 8, подпятник 9 и разъемное кольцо 10. На ёй Нчиванием гайки, 12 поднимают гидроцилиндр 2 до соприкосновения опорной чаши 8 с рамой 1, при этом кольцо 1 О заходит в посадочное гнездо подпятника 9. После этого производят регулирование положения гидроцилиндров 2 на раме 1 путем бокового смещения опорных чаш 6 и 8 относительно рамы 1. По окончании процесса регулировки опорную чашу 6 или 8 фиксируют на раме от бокового смещения, а путем бокового смещения второй незакрепленной чаши достигают перпендикулярности по отношению к плоскости рамы и параллельности установки всех гидроцилиндров между собою. После того, как гидроцилиндры выставлены, гайки 12 плотно затягивают и опорные чаши б, и 8 приваривают к раме 1. Демонтаж гидроцилиндров осуществляется в обратном порядке. При последующем монтаже производить регулирование положения гидроцйлиндров не требуется. Фэрмула изобретения Механизм шагания экскаватора, включающий раму, опертую на лыжи с пЬмощьк) подъёмных гидроцилиндров, выполненных с буртом в нижней части и резьбой с гайкой в верхней части корпуса , о т л и чающийся тем, что, с целью обеспечения возмож йбсти ретулирования пс)ложения гидроцилиндров Иа раме при их установке и упрощения процесса изготовления И монтажа, рама выполнена со сфериiёскиШ опорами; установленными на верхней и нижней плоскостях, зажатытии в осевом направлении между буртом и гаЙ1 :ЬЙ КбрТ1УсакаЖдоГогидроцилиндра. Источники информации, прйнятгыё в 5 в нИМани;е при экспертизе 1.Авторское свидетельство СССР 159146, кл. Е 02 F 9/04, 1962. 2.Авторское свидётельсгво СССР 252941, кп. Е 02 F 9/04, 1968 (прототип)..
Л
