1
Изобретение ОТНОСИТСЯ к трубогибочным станкам и может найти применение в энергомашиностроении для изготовления змеевиков, теплообменных поверхностей парогенераторов. 5
Известен станок для гибки змеевиков, содержащий смонтированные на ста нине параллельно один относительно другого два приводных вала с расположенными на них гибочными роликами, tO соединенными с механизмом их попеременного обкатывания, выполненного в виде установленного на одном из приводных валов водила с закрепленной на нем осью, несущей кривошип 1. 15
Однако из-за постоянного межцентрового расстояния между гибочными роликами на этом станке невозможно изготавливать змеевики с различными радиусами изогнутых колен.20
Целью изобретения является расширение технологических возможностей путем обеспечения гибки змеевиков с различным радиусом гибки колен.
Указанная цель достигается тем, 25 что механизм попеременного обкатывания снабжен соединенными между собой промежуточной передачей двумя ползунами один из которых соединен с кривошипом и установлен с возмож- 30
ностью перемещения относительно него, а другой установлен с возможностью перемещения по направляющим, смонтированным на водиле, и на нем жестко закреплена ось, при этом промежуточная передача выполнена в виде установленной на оси, несущей кривса1шп, звездочки, причем кривошип жестко закреплен на ней, и кинематически соединенных с ней цепью двух других звездочек, одна из которых жестко закреплена на приводном валу, а другая ;на оси ползуна, установленного в на- управляющих водила.
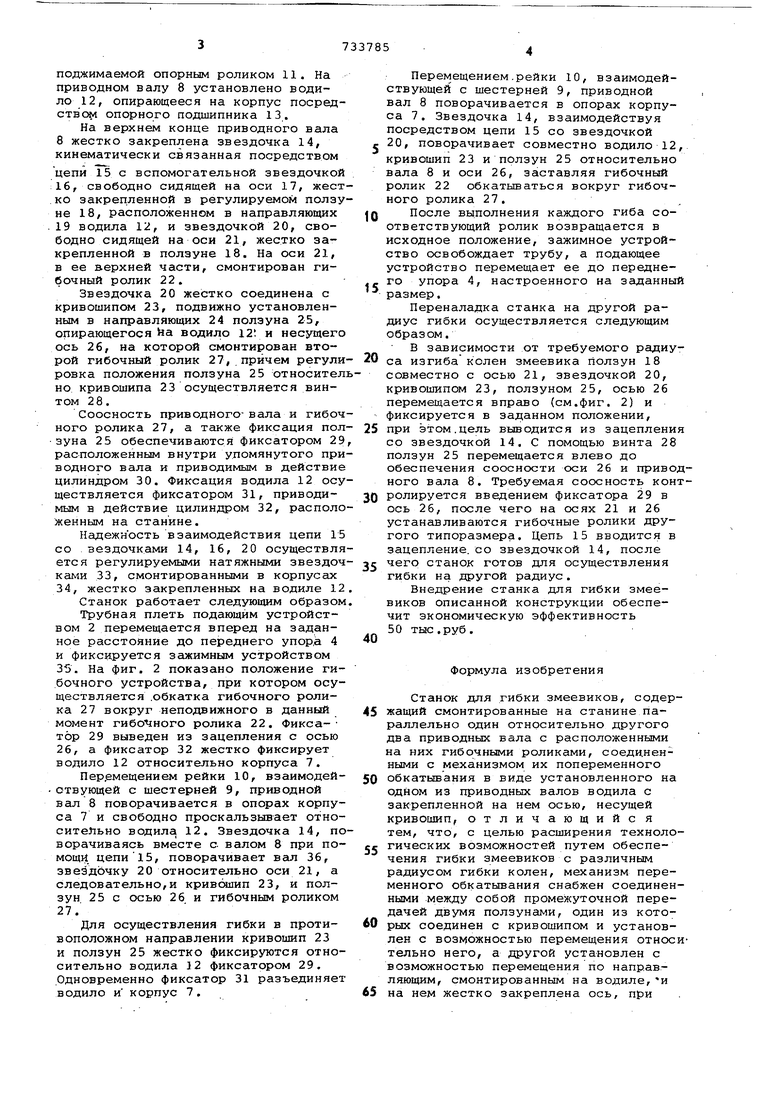
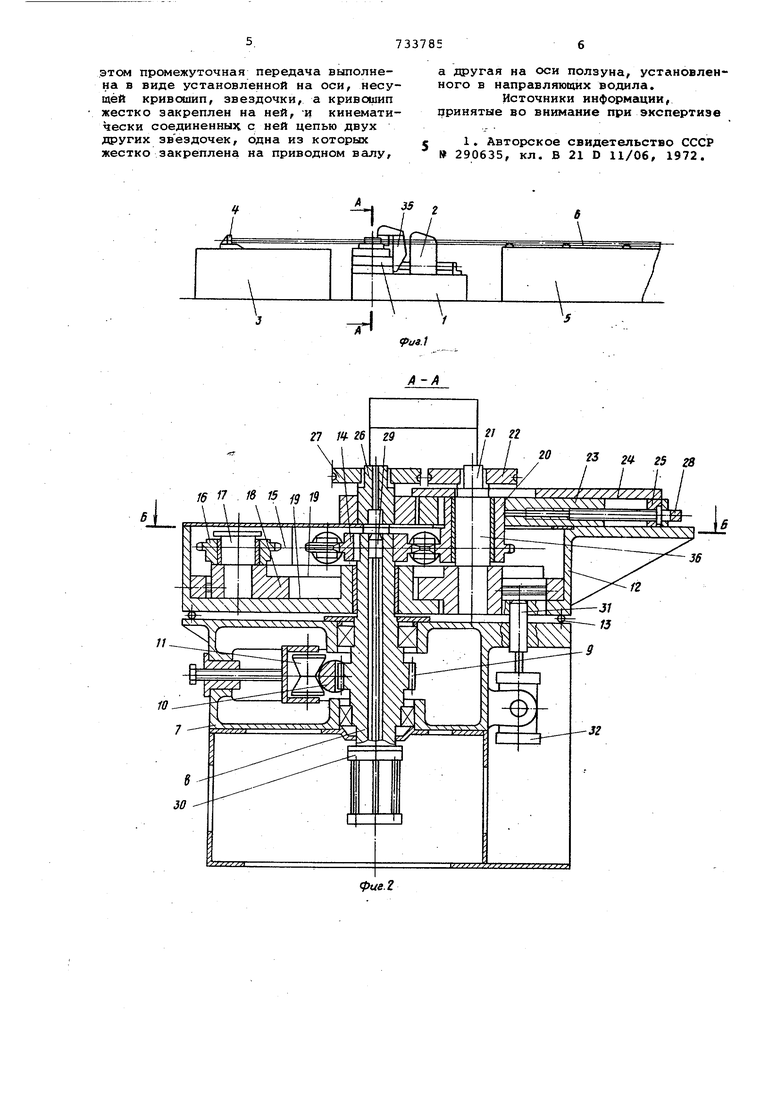
; На фиг. 1 показан станок, главный вид; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - разрез Б-В на фиг. 2.
Станок для гибки змеевиков содержит станину 1 с расположенными на ней гибочным устройством, зажимным устройством, подающим устройством 2, раму 3, в направляющих которой перемещается передний упор 4, и рольганг 5, предназначенный для поддержания конца трубной плети 6.
Гибочное устройство -состоит из корпуса 7, в опорах которого подвижно смонтирован приводной вал 8, выполненный за одно целое с шестерней 9, взаимодействующей с рейкой 10,
поджимаемой опорньлм роликом 11. На приводном валу 8 установлено водило 12, опирающееся на корпус посредством опорного подшипника 13.
На верхнем конце приводного вала 8 жестко закреплена звездочка 14, кинематически связанная посредством
цепи 15 с вспомогательной звездочкой 16, свободно сидящей на оси 17, жестко закрепленной в регулируемом ползуне 18, расположенном в направляющих 19 водила 12f и звездочкой 20, свободно сидящей на оси 21, жестко закрепленной в ползуне 18. На оси 21, в ее верхней части, смонтирован гибочный ролик 22.
Звездочка 20 жестко соединена с кривошипом 23, подвижно установленным в направляющих 24 ползуна 25, опирающегося ia водило 121 и несущего ось 26, на которой смонтирован второй гибочный ролик 27, причем регулировка положения ползуна 25 относительно кривошипа 23 осуществляется винтом 28.
Соосность приводного-вала и гибочного ролика 27, а также фиксация ползуна 25 обеспечиваются фиксатором 29 расположенным внутри упомянутого приводного вала и приводимым в действие цилиндром 30. Фиксация водила 12 осуществляется фиксатором 31, приводимым в действие цилиндром 32, расположенным на станине.
Надежность взаимодействия цепи 15 со зездочками 14, 16, 20 осуществляется регулируемыми натяжными звездочками 33, смонтированными в корпусах
34,жестко закрепленных на водиле 12
Станок работает следующим образом
Трубная плеть подающим устройством 2 перемещается вперед на заданное расстояние до переднего упорд 4
и фиксируется зажимным устройством
35.На фиг. 2 показано положение гибочного устройства, при котором осуществляется .обкатка гибочного ролика 27 вокруг неподвижного в данный момент гибо1ного ролика 22. Фикса-тор 29 выведен из зацепления с осью 26, а фиксатор 32 жестко фиксирует водило 12 относительно корпуса 7.
Пер.емещением рейки 10, взаимодействующей с шестерней 9, приводной вал 8 поворачивается в опорах корпуса 7 и свободно проскальзывает относительно водила 12. Звездочка 14, поворачиваясь вместе с валом 8 при помощ цепи 15, поворачивает вгш 36, звездочку 20 относительно оси 21, а следовательно,и кривошип 23, и ползун 25 с осью 26 и гибочным роликом 27.
Для осуществления гибки в противоположном направлении кривошип 23 и ползун 25 жестко фиксируются относительно водила 12 фиксатором 29. Одновременно фиксатор 31 разъединяет водило и корпус 7 .
Перемещением.рейки 10, взаимодействующей с шестерней 9, приводной вал 8 поворачивается в опорах корпуса 7. Звездочка 14, взаимодействуя посредством цепи 15 со звездочкой е 20, поворачивает совместно водило 12, кривошип 23 и ползун 25 относительно вала 8 и оси 26, заставляя гибочный ролик 22 обкатываться вокруг гибочного ролика 27.
Q После выполнения каждого гиба соответствующий ролик возвращается в исходное положение, зажимное устройство освобождает трубу, а подающее устройство перемещает ее до передне- го упора 4, настроенного на заданный размер.
Переналадка станка на другой радиус гибки осуществляется следующим образом.
В зависимости от требуемого радиуса изгиба колен змеевика ползун 18 совместно с осью 21, звездочкой 20, кривошипом 23, ползуном 25, осью 26 перемещается вправо (см.фиг. 2) и фиксируется в заданном положении,
5 при этом.цель выводится из зацепления со звездочкой 14. С помощью винта 28 ползун 25 перемещается влево до обеспечения соосности оси 26 и приводного вала 8. Требуемая соосность контролируется введением фиксатора 29 в ось 26, после чего на осях 21 и 26 устанавливаются гибочные ролики другого типоразмера. Цепь 15 вводится в зацепление, со звездочкой 14, после
ij чего станок готов для осуществления гибки на другой радиус.
Внедрение станка для гибки змеевиков описанной конструкции обеспечит экономическую эффективность
50 тыс.руб. 0
Формула изобретения
Станок для гибки змеевиков, содер5 жащий смонтированные на станине параллельно один относительно другого два приводных вала с расположенными на них гибочными роликами, соединенными с механизмом их попеременного 0 обкатывания в виде установленного на одном из приводных валов водила с закрепленной на нем осью, несущей кривошип, отличающийс я тем, что, с целью расширения технолое гических возможностей путем обеспечения гибки змеевиков с различным радиусом гибки колен, механизм переменного обкатывания снабжен соединенными между собой промежуточной передачей двумя ползунами, один из котоО рых соединен с кривошипом и установлен с возможностью перемещения относительно него, а другой установлен с возможностью перемещения по направляющим, смонтированным на водиле, 5 на нем жестко закреплена ось, при
этом промежуточная передача вьтолнена в виде установленной на оси, несущей кривсвпип, звездочки, а кривошип жестко закреплен на ней, -и кинематически соединенных с ней цепью двух других эвездочек, одна из которых жестко закреплена на приводном валу.
а другая на оси ползуна, установленного в направляющих водила.
Источники информации, принятые во внимание при экспертизе
е 1. Авторское свидетельство СССР 290635, кл, В 21 D 11/06, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК ДЛЯ ГИБКИ ЗМЕЕВИКОВ | 1971 |
|
SU290635A1 |
| Станок для гибки змеевиков | 1970 |
|
SU457261A2 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1433550A1 |
| Трубогибочный станок | 1975 |
|
SU659235A1 |
| Станок для загибки и отрезки концов трубных спиралей | 1981 |
|
SU986541A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Машина для гибки трубных панелей | 1983 |
|
SU1172630A1 |
jLi 24- 25 JS га
