Cj х-х
сл
-Г8
4 со оо сл сд
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Станок для изготовления змеевиков | 1980 |
|
SU946724A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| СТАНОК ДЛЯ ГИБКИ ЗМЕЕВИКОВ | 1971 |
|
SU290635A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| Станок для изготовления змеевиков | 1977 |
|
SU725766A1 |
Изобретение относится к станкам для изготовления змеевиков. Цель - сокращение времени на переналадку и расширение диапазона радиусов гиба. Станок содержит планшайбу 14, на которой установлена каретка 15 с закрепленной на ней сменной державкой 16, в которой смонтирован набор гибочных роликов (ГР) 17. Поочередное вращение одного из ГР вокр.уг другого осуществляется от приводного полого вала 9, в полости которого размещен фиксатор 21 с возможностью осевого перемещения. Фиксатор 21 периодически осуществляет фиксацию одного из ГР 17 в каретке. Второй ГР при этом обкатывает первый. После первого гиба проис.ходит последовательно разблокировка первого ГР, пере.мещение каретки 15 в йротивопоЗюжную позипию, фиксап.ия второго ГР и второй гиб. Затем происходит повторение операций в обратной последовательности. 9 ил.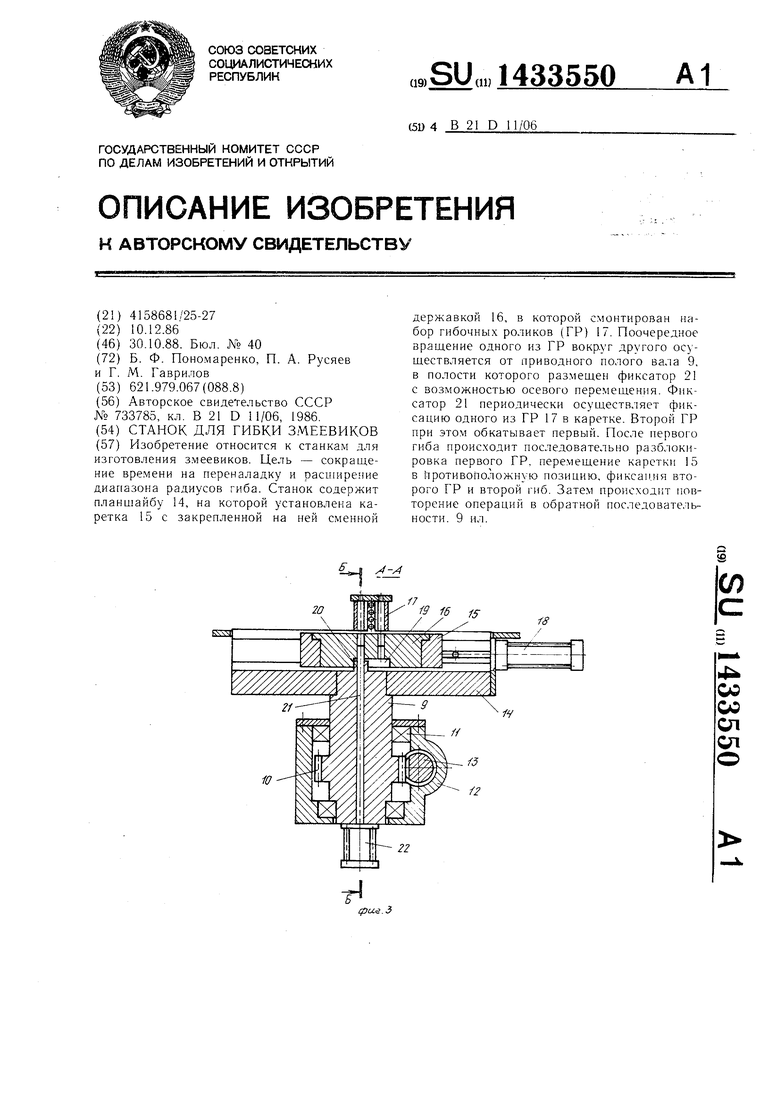
фи..3
Изобретение относится к трубогибочным станкам, а точнее к станкам для изготовления змеевиков.
Цель изобретения - сокращение времени на переналадку и расширение диапазона ра- диусов гиба.
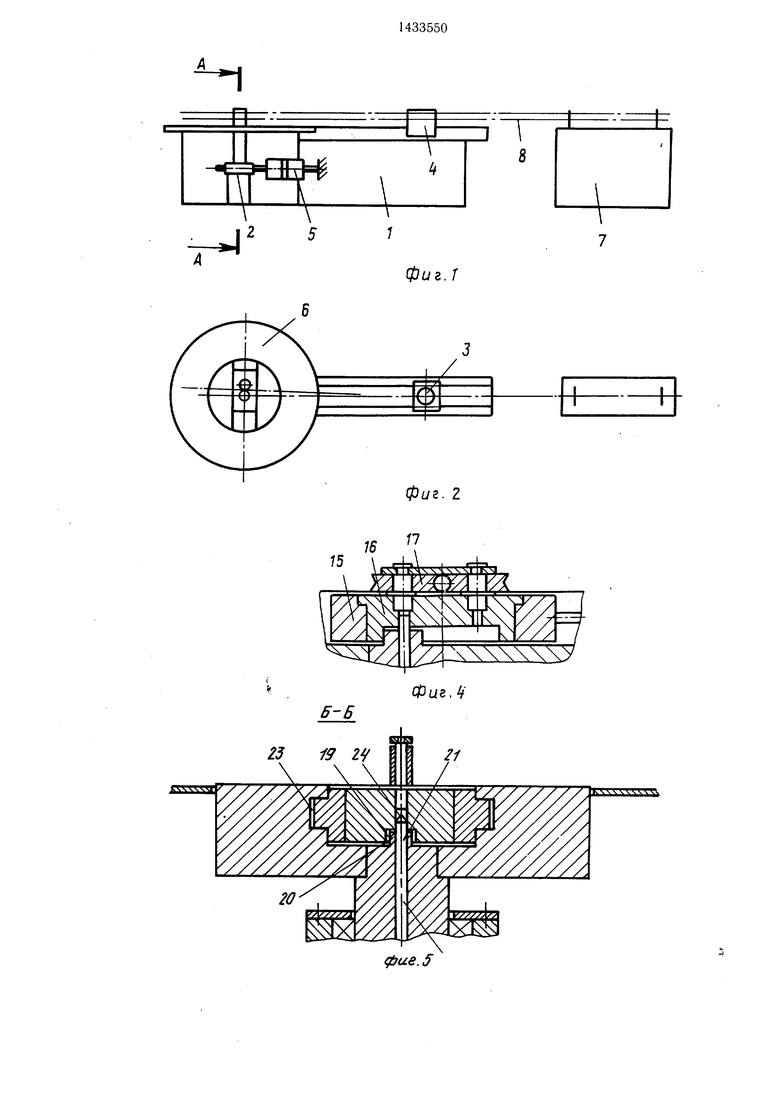
На фиг. 1 изображен станок, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. ; на фиг. 4 - сменный блок гибочных роликов, вариант испол- нения; на фиг. 5 - Б-Б на фиг. 3; на фиг. 6-9 - этапы гибки змеевика.
Станок для гибки змеевиков содержит станину 1 с расположенным на ней гибочным узлом 2, зажимное устройство 3, подающее устройство 4, привод 5 гибочного узла 2, стол 6, опору 7 для удержания свободного конца трубы 8.
Гибочный узел 2 состоит из приводного кала 9, выполненного заодно с шестерней 10 и установленного на подшипниках 11 в корпусе 12. Приводной вал 9 взаимодействует с рейкой 13, связанной с приводом 5 ее перемещения. На верхнем конце вала 9 закреплена планшайба 14, в направляющих которой установлена каретка 15 с закреплен- ной на ней быстросменной державкой 16 с гибочными роликами 17. Каретка 15 перемещается в крайние позиции сил.овым, цилиндром 18, ход которого рассчитан на максимальный радиус гиба. В державке 16 вы- полнен паз 19, взаимодействующий с выступом 20 приводного вал а 9. Длина паза 19 строго соответствует межосевому расстоянию роликов 17, а значит, и радиусу гиба. Соосность приводного вала 9 и гибочных роликов 17, а также фиксация каретки 15 обес- печивается фиксатором 21, расположенны.м внутри приводного вала 9, приводимого в действие цилиндром 22. Каретка 15 установлена в планшайбе 14 в прямоугольных направляющих 23, а державка 16 имеет сквозные отверстия 24 для установки роликов 17, образуя единый блок.
Станок работает следующим образом.
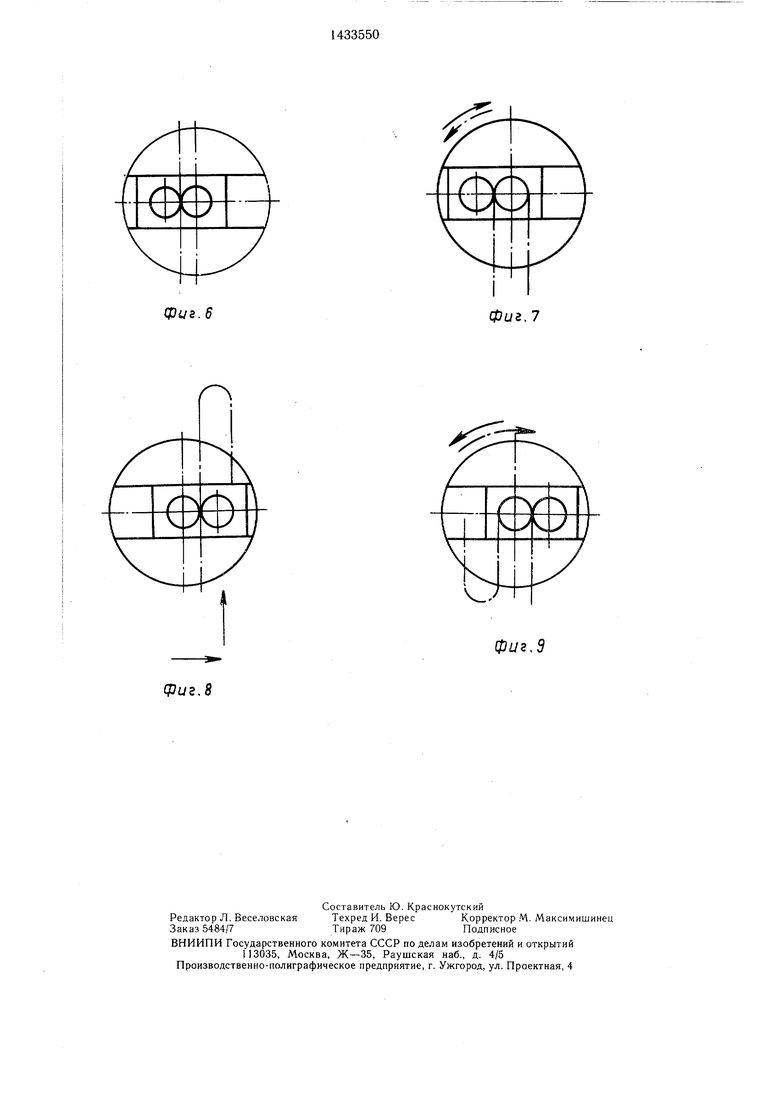
В каретку 15 устанавливается сменная державка 16 с роликами 17 с необходимым радиусом гиба. Трубы 8, опирающиеся на упору 7, закрепляются зажимным устройством 3 на подающем устройстве 4 и устанавливаются Б рабочее пространство между гибочными роликами 17. В подающем устройстве 4 устанавливаются на определенный размер, обусловленный расстоянием между смежными гибами змеевика, конечные выключатели. При включении привода 5 через рейку 13 и щестерню 10 передается вращение приводному валу 9. При первом гибе (фиг. 6 и 7) правый ролик 17 зафиксирован
фиксатором 21, а левый ролик при вращении вала 9 обкатывается вокруг правого и изгибает трубы 8. После выполнения зига левый ролик возвращается в исходное положение, а правый расфиксируется фиксатором 21. Затем (см. фиг. 8) каретка 15 смещается цилиндром 18 вправо и фиксируется левый ролик 17. Трубы 8 подаются на необходимое расстояние подающим устройством 4. При вращении в противоположную сторону валу 9 (см. фиг. 9) обкатывается правый ролик вокруг зафиксированного левого ролика 17. После выполнения зига правый ролик приводится в иходное положение, а левый ролик расфиксируется. Затем все операции повторяются до полного изготовления змеевиков.
Переналадка станка на другой типоразмер змеевика осуществляется следующим об разом.
Из каретки 15 расфиксируется и вынимается державка 16 с гибочными роликами 17, а на ее место устанавливается другая державка 16 с иными геометрическими параметрами и фиксируется в ложементе каретки 15, после чего станок готов к изготовлению змеевиков другого типоразмера.
Смена блока гибочных роликов занимает минимальное время и не требует дополнительной настройки. При этом использование сменных блоков позволяет изготавливать змеевики при частой смене их типоразмеров практически с постоянными пара.мет- рами.
Формула изобретения
Станок для гибки змеевиков, содержащий набор гибочных роликов, устанавливаемых попарно на параллельных осях в отверстиях де ржавки и связанных с приводом поочередного обкатывания одного ролика вокруг другого, выполненного в виде приводного полого вала, связанного с планшайбой, и фиксатора, установленного в полом валу с возможностью осевого перемещения, отличающийся тем, что, с целью сокращения времени на переналадку и расщирения диапазона радиусов гиба, ,он снабжен подвижной кареткой, смонтированной с возможностью возвратно-поступательного перемещения в шланшайбе поперек направления подачи трубы, державка осей выпо.лнена съемной с пазом на основании и размещена в каретке, приводной вал снабжен тор цовым выступом, размещенным в пазу державки, а ролики закреплены на осях стационарно, при этом фик сатор установлен с возможностью периодического размещения его конца в одном из отверстий державки.
фиг. Г
фиг. г
Фиг,
фае. 5
фуг. 5
фиг.8
Фиг.7
V.
фиг.Э
| Станок для гибки змеевиков | 1977 |
|
SU733785A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
