Изобретение относится к вспомогательному оборудованию кузнечно-прессового производства машиностроительных предприятий, а именно к устройствам, манипулирующим заготовкой или инструментом при обслуживании молотов.
Цель изобретения - улучшение условий обслуживания молота и уменьшение занимаемых манипулируюш,им устройством производственных плош,адей.
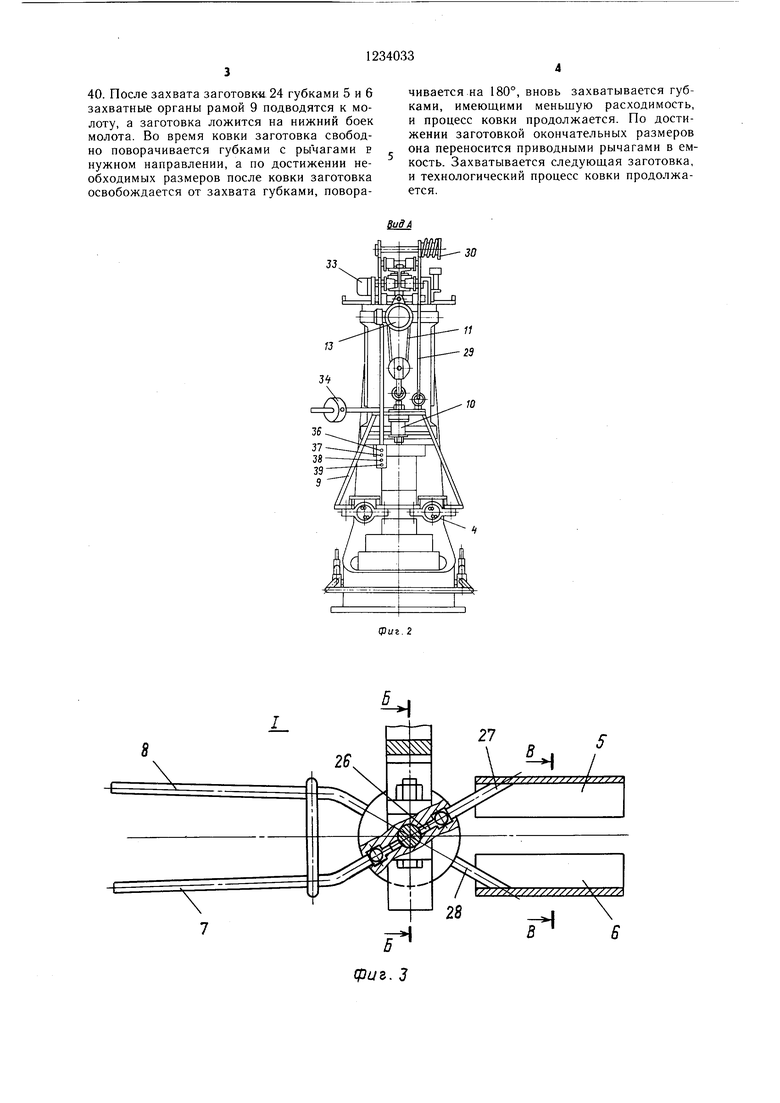
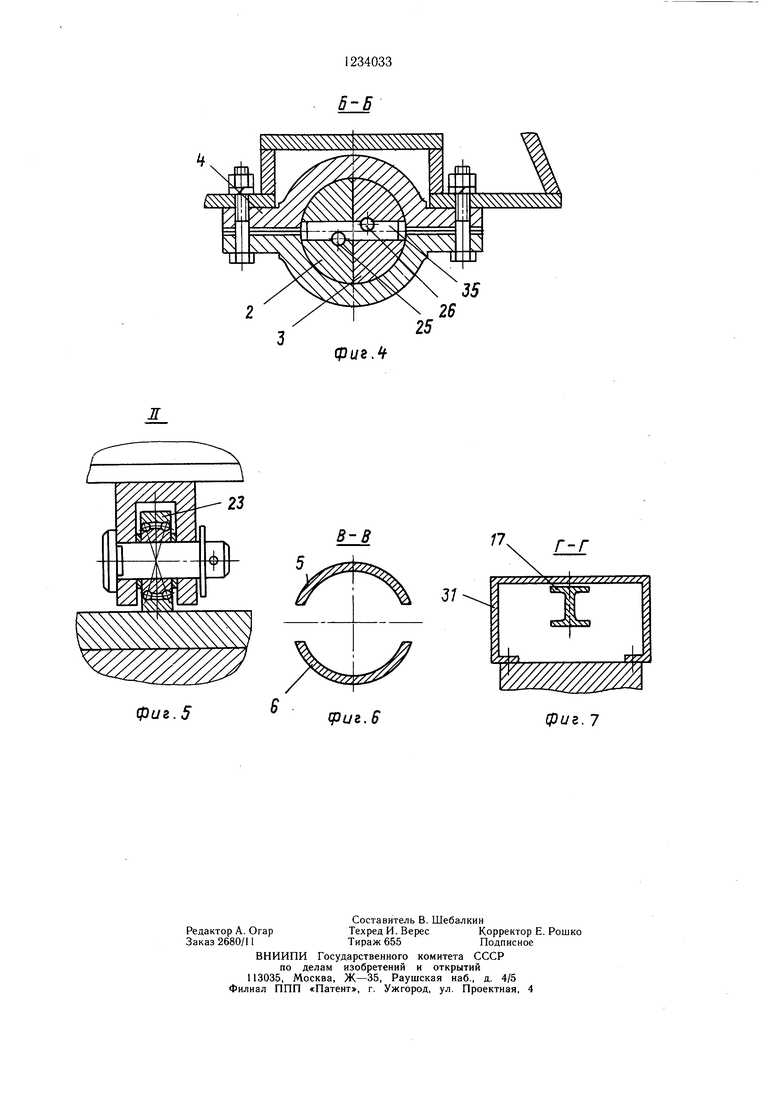
На фиг. 1 изображен ковочный молот с манипулируюш.им устройством; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фи г. 1; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - узел И на фиг. 1 в разрезе; на фиг. 6 - сечение В-Б на фиг. 3; на фиг. 7 - сечение Г-Г на фиг. 1.
Манипулирующее устройство содержит захватный орган 1 в виде полусфер 2 и 3, смонтированных в разъемном корпусе 4. В полусферах 2 и 3 закреплены соответственно захватные губки 5 и 6 и их приводные рычаги 7 и 8.
Корпус 4 установлен в раме 9, смонтированной на амортизаторе 10 гибкой связи 11 последнего с барабаном 12 подъема и опускания захватного органа. Гибкая связь 11 представляет собой стальной трос, наматываемый электродвигателем 13 на барабан 12, который установлен на тележке 14, смонтированной с помощью жестко связанной с ней дополнительной тележки 15 и их катков 16 на двутавровой балке 17.
Двутавровая балка 17 своим концом шар- нирно при помощи подшипников 18 и 19 качения смонтирована на оси 20, закрепленной в крышке 21 компрессорного цилиндра 22 молота. Средней своей частью двутавровая балка с помощью закрепленного снизу на ней катка 23 опирается на верхнюю плоскость крышки рабочего цилиндра (не показан) молота.
Захватные губки 5 и б изготовляются с профилем, адекватным внешней поверхности заготовок 24. В полусферах под наклоном к горизонтальной плоскости выполнены отверстия 25 и 26, в которых с одной стороны закреплены державки 27 и 28 захватных губок 5 и 6, а с другой - концы приводных рычагов 7 и 8. Расходимость губок, смонтированных в раме 9 захватного органа, неодинакова. На одном из захватов эта расходимость больше, чем на другом. Это связано с тем, что в начальный момент заготовка 24 имеет по всему периметру большой размер, и она захватывается захватом с большой расходимостью, а после ковки, т. е. уменьшения поперечного сечения свободного, не занятого губками, конца, заготовка поворачивается на 180° и захватывается губками, имеющими меньщую расходимость. Рама 9 имеет дополнительную гибкую связь 29 с дополнительной тележкой 15, наматываемую на самокрутящийся с помощью пружины (не показана) барабан 30, установленный на дополнительной тележке 15.
Гибкая связь 29 имеет ограниченую длину, и при размотке не дает возможности раме с захватными органами опуститься ниже определенного положения, удерживая тем самым захватные органы от падения их на землю (пол) в случаях выхода из строя системы управления и торможения барабаном 12.
Двутавровая балка 17 над крышкой рабочего цилиндра молота с возможностью свободного перемещения в горизонтальной плоскости охватывается скобой 31, жестко закрепленной в этой крышке. Для управления перемещением тележки 14 по двутавровой балке 17 и подъемом и опусканием рамы 9 с захватными органами имеется подвесной пульт 32 управления, электрически связанный с электродвигателем 33 перемещения тележек 14 и 15 по двутавровой балке 17
0 и с электродвигателем 13 подъема и опускания гибкой связи 11 путем вращения этим электродвигателем барабана 12. Для уравновешивания рамы в вертикальной плоскости на ней установлен уравновешиватель 34. Полусферы 2 и 3 связаны между собой осью
5 35. На подвесном пульте управления имеются кнопка 36 подъема, кнопка 37 опускания захватного органа и кнопки 38 и 39 перемещения его соответственно вперед и назад. Позицией 40 обозначена скоба для фиксирования захватных рычагов в рабочем по ложении, а позицией 41 - защитный прозрачный экран.
Устройство работает следующим образом. При нажатии на кнопки 38 и 39 на пульте управления включается электродвигатель
5 33, при этом перемещаются тележки 14 и 15 по двутавровой балке 17 соответственно вперед и назад, а при нажатии на кнопки 36 и 37 .включается электродвигатель 13, при этом поднимается и опускается с помощью наматывания на барабан 12 или сматыва0 ния с него гибкой связи 11 рама 9 с губками 5 и 6 и приводными рычагами 7 и 8. Управление раскрытием и закрытием губок 5 и 6 с помощью рычагов 7 и 8, а также поворот всей системы в горизонтальной и вертикальной плоскостях осуществляется вручную оператором вращением полусфер 2 и 3 рычагами 7 и 8 на оси 35 одна относительно другой и совместно друг с другом относительно корпуса 4, а также подъемом и опусканием рамы 9 с помощью гибкой
Q связи 11 барабаном 12. Для захвата заготовки 24 нажимают на одну из кнопок 38 и 39, и рама 9 с захватными органами устанавливается на уровне нагретой заготовки, расположенной на стеллаже около молота (не показан). Раскрываются губки 5
5 и 6 с больщой расходимостью и подводятся к заготовке. Заготовка 24 захватывается губками и зажимается приводными рычагами 7 и 8 перемещением к их концам скобы
40. После захвата заготовк-й 24 губками 5 и 6 захватные органы рамой 9 подводятся к молоту, а заготовка ложится на нижний боек молота. Во время ковки заготовка свободно поворачивается губками с рычагами в нужном направлении, а по достижении необходимых размеров после ковки заготовка освобождается от захвата губками, поворачивается на 180°, вновь захватывается губками, имеющими меньшую расходимость, и процесс ковки продолжается. По достижении заготовкой окончательных размеров она переносится приводными рычагами в емкость. Захватывается следующая заготовка, и технологический процесс ковки продолжается.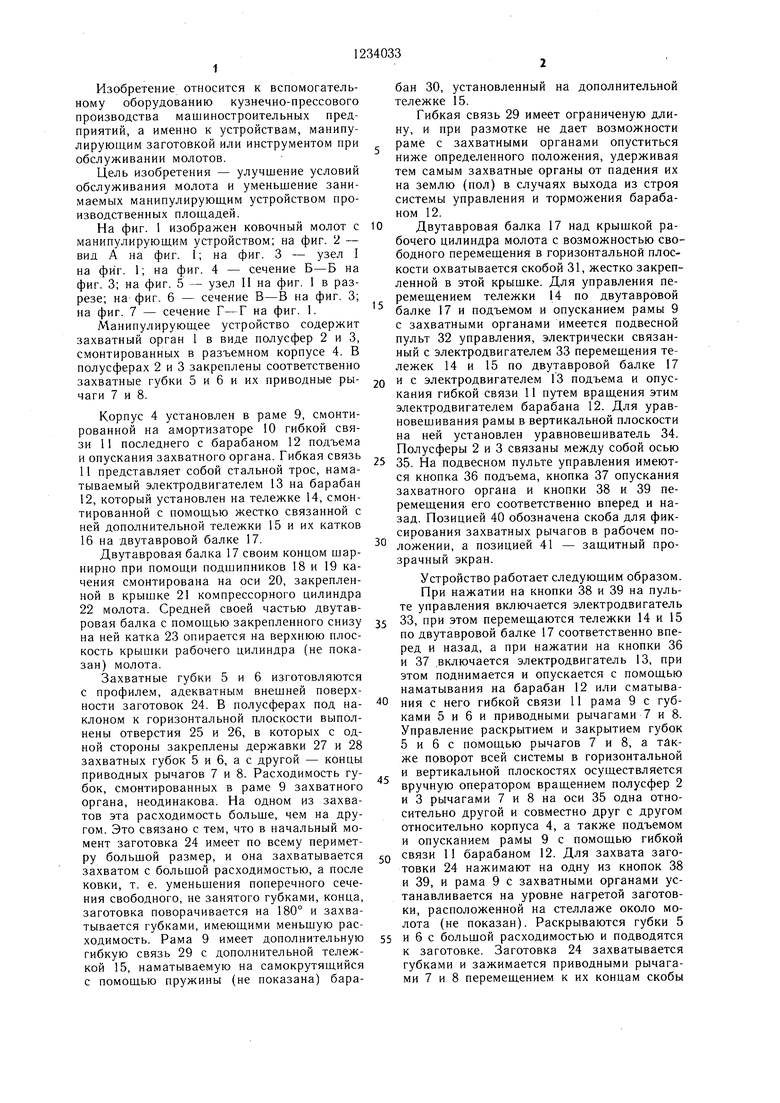
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1639846A1 |
| Установка для укладки арматуры в форму | 1986 |
|
SU1384696A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| Агрегат для резки листового проката | 1982 |
|
SU1046043A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЗАГОТОВОК | 2006 |
|
RU2308336C1 |
| Устройство для продольной подачи бревен в пильный станок | 1978 |
|
SU1056884A3 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ | 1990 |
|
RU2022776C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |

33
фиг. 3
фиёЛ
фиг. 5
(Риг.6
Г-Г
фиг. 7
| Подвесной ковочный манипулятор | 1975 |
|
SU591264A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
