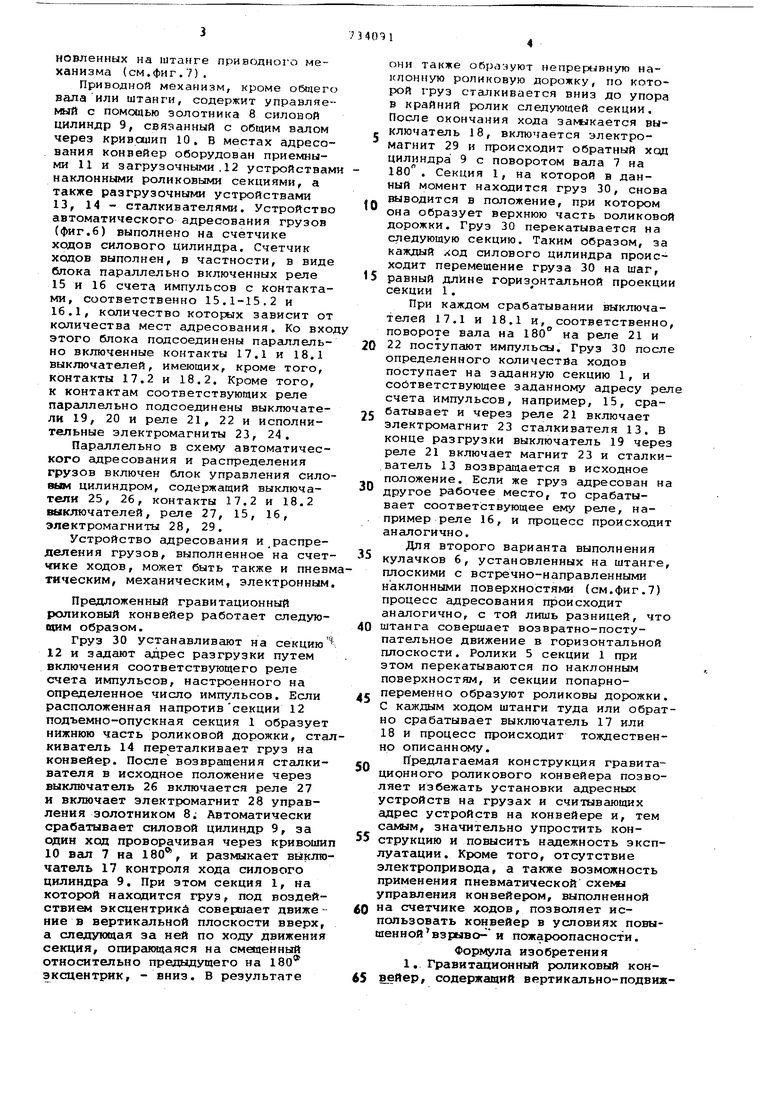
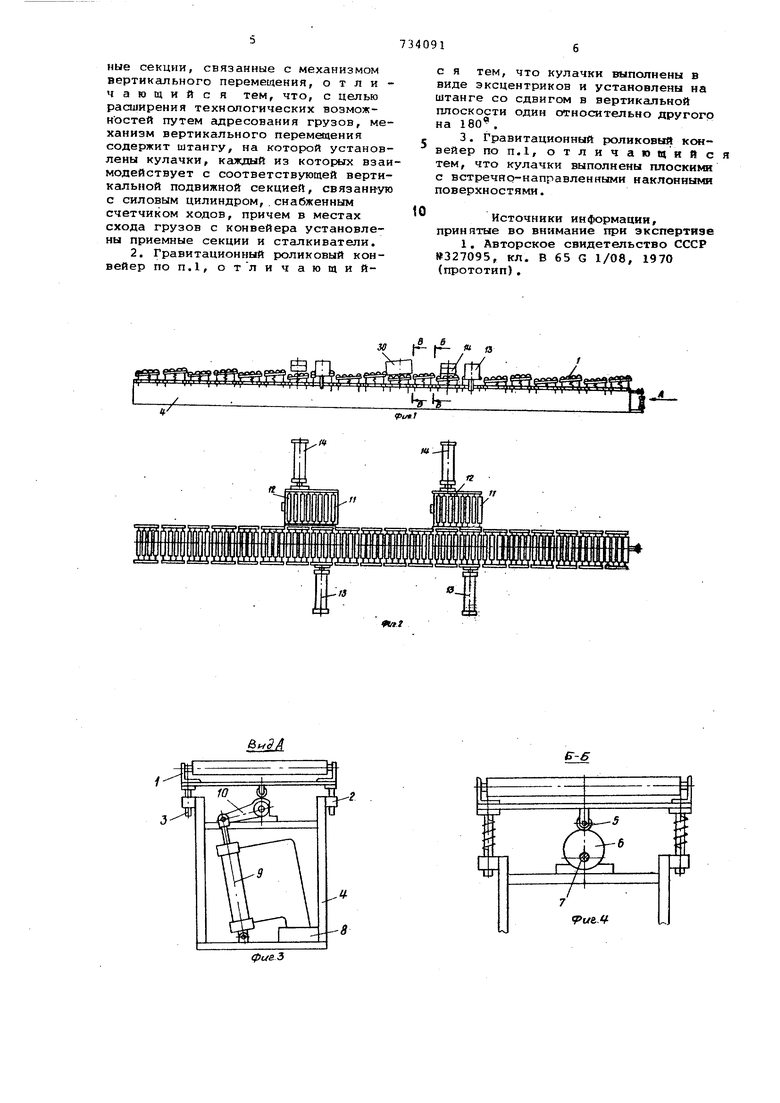
Изобретение относится к конструк ции транспортирующего устройства непрерывного действия, а именно .гра витационных распределительных роликовых конвейеров, используемых для транспортного обслуживания технологических линий. Известен гравитационый роликовый конвейер, содержащий вертикальноподвижные секции, связанные с мехая мом вертикального перемещения 1. Недостатком этого устройства явл ется отсутствие избирательности адресования груза на определенное рабочее место из-за отсутствия средств информации о месте нахождения груза. Целью предлагаемого изобретения является расширение технологических возможностей путем адресования грузов, для чего механизм вертикального перемещения содержит штангу, на которой установлены кулачки, каждаай из которых взаимодействует с соответствующей вертикальной подвижной секцией, связанную с силовым цилинд ром, снабженным счетчиком ходов, причем в местах схода грузов с конвейера установлены приемные секции и стапкиватели. При этом кулачки выполнены в виде эксцентриков и установлены на штанге со сдвигом в вертикальной плоскости один относительно другого на 180 или кулачки выполнены плоскими с встречно-направленными наклонными поверхностями. На фиг.1 изображен гравитационный роликовый конвейер, общий вид; на фиг.2 - то же, план; на фиг.З то же, вид А; на фиг.4 - то же, разрез по В-Б; на фиг.5 - то же, разрез по В-В; на фиг.6 - схема автоматического адресования и распределения грузов; на фиг.7 - вариант выполнения гравитационного распределительного роликового конвейера с плоскими кулачками, установленными на штанге. Предлагаемый гравитационный роликовый конвейер содержит подпружиненные подъемно-опускные роликовые секции I, установленные с помощью втулок 2 и колонок 3 на раме 4 (см.фиг.4). Каждая из секций 1 роликами 5 опирается на кулачки б, выполненные либо в виде эксцентриков, установленных на общем валу 7 приводного механизма, либо в виде плоских кулачков с встречно-наг1равленными наклонными поверхностями, установленных на штанге приводного механизма (см,фиг.7),
Приводной механизм, кроме общего валаили штанги, содержит управляемый с помощью золотника 8 силовой цилиндр 9, связанный с общим валом через кривошип 10, В местах адресования конвейер оборудован приемными 11 и загрузочными.12 устройствамнаклонными роликовыми секциями, а также разгрузочными устройствами 13, 14 - сталкивателями, Устройство автоматического адресования грузов (фиг.6) выполнено на счетчике ходов силового цилиндра. Счетчик хсдов выполнен, в частности, в виде блока параллельно включенных реле 15 и 16 счета импульсов с контактами, соответственно 15.1-15.2 и 16.1, количество которых зависит от количества мест адресования. Ко вхо этого блока подсоединены параллельно включенные контакты 17.1 и 18.1 выключателей, имеющих, кроме того, контакты 17.2 и 18.2. Кроме того, к контактам соответствующих реле параллельно подсоединены выключатели 19, 20 и реле 21, 22 и исполнительные электромагниты 23, 24.
Параллельно в схему автоматического адресования и распределения грузов включен блок управления силовым цилиндром, содержащий выключатели 25, 26, контакты 17.2 и 18.2 выключателей, реле 27, 15, 16, электромагниты 28, 29.
Устройство адресования и распределения грузов, выполненное на счетчяке ходов, может быть также и пневтическим, механическим, электронным
Предложенный гравитационный роликовый конвейер работает следую(цим образом.
Груз 30 устанавливают на секцию 12 и задают адрес разгрузки путем включения соответствующего реле счета импульсов, настроенного на определенное число импульсов. Если расположенная напротивсекции 12 подъемно-опускная секция 1 образует нижнюю часть роликовой дорожки, стакиватель 14 переталкивает груз на конвейер. После возвращения сталкивателя в исходное положение через выключатель 26 включается реле 27 и включает электромагнит 28 управления золотником 8; Автоматически срабатывает силовой цилиндр 9, за один ход проворачивая через кривоши 10 вал 7 на 180, и размыкает вйключатель 17 контроля хода силового цилиндра 9. При этом секция 1, на которой находится груз, под воздействием эксцентрики совершает движе ние в вертикальной плоскости вверх, а следующая за ней по ходу движения секция, опирающаяся на смещенный относительно предыдущего на 180 эксцентрик, - вниз. В результате
они также образуют непрер1лвную наклонную роликовую дорожку, по которой груз сталкивается вниз до упора в крайний ролик следующей секции. После окончания хода заг)кается вы, ключатель 18, включается электромагнит 29 и происходит обратный ход цилиндра 9 с поворотом вала 7 на 180 . Секция 1, на которой в данный момент находится груз 30, снова
выводится в положение, при котором
она образует верхнюю часть ооликовой дорожки. Груз 30 перекатывается на следующую секцию. Таким образом, за каждый ход силового цилиндра проис ходит переметение груза 30 на шаг,
5 равный длине горизрнтгшьной проекции секции 1.
При каждом срабатывании выключателей 17.1 и 18.1 и, соответственно, повороте вала на 180° на реле 21 и
0 22 поступают импульсы. Груз 30 после определенного количества ходов поступает на заданную секцию 1, и сойтветствующее заданному адресу репе счета импульсов, например, 15, срабатывает и через реле 21 включает электромагнит 23 сталкивателя 13. В конце разгрузки выключатель 19 через реле 21 включает магнит 23 и сталкиватель 13 возвращается в исходное положение. Если же груз адресован на другое рабочее место, то срабатывает соответствующее ему реле, на. пример реле 16, и процесс происходит аналогично.
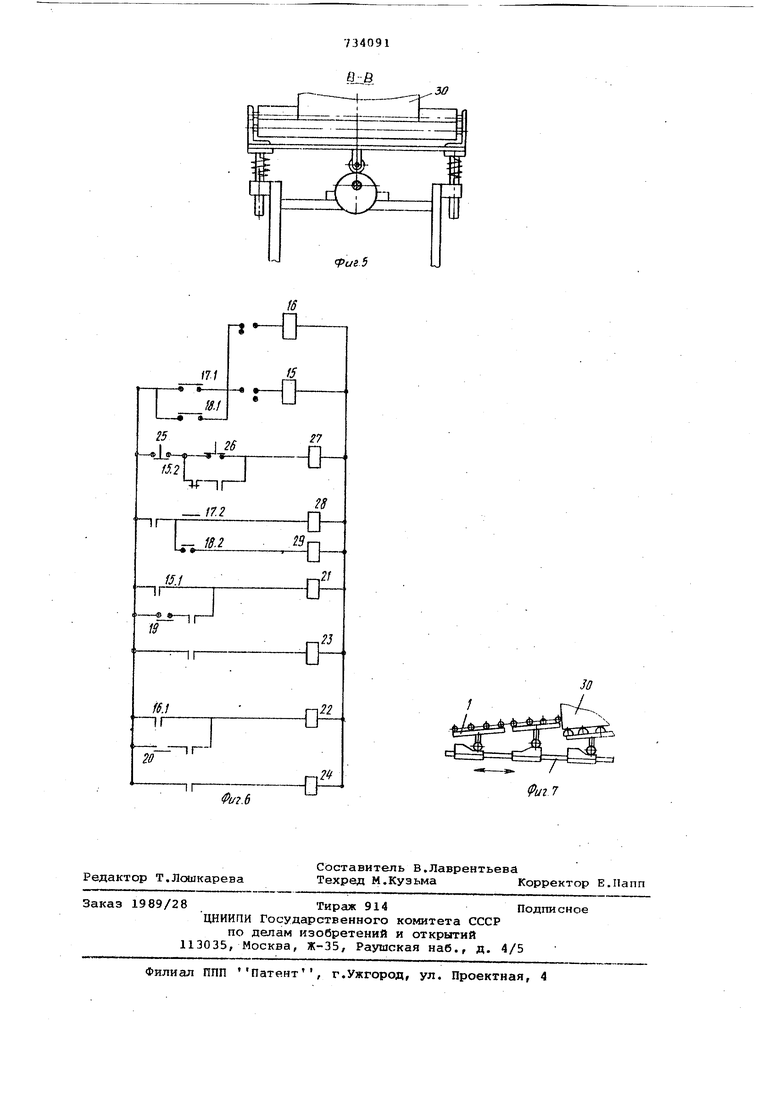
Для второго варианта выполнения
кулачков 6, установленных на штанге, плоскими с встречно-направленными наклонными поверхностями (см.фиг.7) процесс адресования происходит аналогично, с той лишь разницей, что
0 штанга совершает возвратно-поступательное движение в горизонтальной плоскости. Ролики 5 секции 1 при этом перекатываются по наклонным поверхностям, и секции попарнопеременно образуют роликовы дорожки. С каждым ходом штанги туда или обратно срабатывает выключатель 17 или 18 и процесс происходит тождественно описанному.
Предлагаемая конструкция гравитационного роликового конвейера позволяет избежать установки адресных устройств на грузах и считывающих адрес устройств на конвейере и, тем самым, значительно упростить конструкцию и повысить надежность эксплуатации. Кроме того, отсутствие электропривода, а также возможность применения пневматической схеглл управления конвейером, выполненной
0 на счетчике ходов, позволяет использовать конвейер в условиях повышенной взрыво- и пожароопасности.
Форкула изобретения 1. Гравитсщионный роликовый конвейер, содержащий вертикально-подвижиые секции, связанные с механизмом вертикального перемещения, отличающийся тем, что, с целью расширения технологических воэможностей путем адресования грузов, механизм вертикального переметения содержит штангу, на которой установлены кулачки, каждый из которых взаимодействует с соответствующей вертикальной подвижной секцией, связанн ую с силовым цилиндром,,снабженным счетчиком ходов, причем в местах схода грузов с конвейера установлены приемные секции и сталкиватели.
2. Гравитационный роликовый конвейер попЛ, отличающийс я тем, что кулачки выполнены в виде эксцентриков и установлены на штанге со сдвигом в вертикальной плоскости один относительно другого на 180.
3. Гравитационный рюликовый конвейер ПОП.1, отличающийс тем, что кулачки выполнены плоскими с встЕ ечно-направлениыми наклонными пов ерхн остями.
Источники информации, принятые во внимание при экспертиэе
1. Авторское свидетельство СССР №327095, кл. В 65 G 1/08, 1970 (прототип).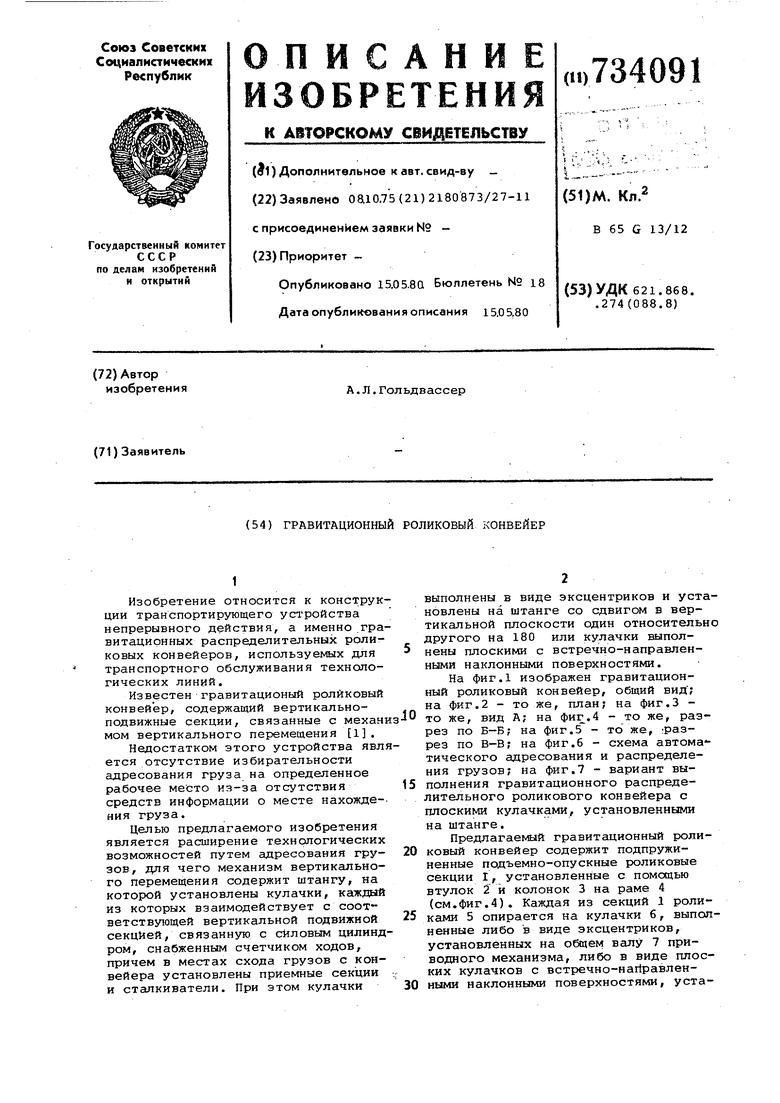
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Автоматическая линия контроля корпусных деталей | 1988 |
|
SU1629232A1 |
| Поточная линия для производства полых волокнистых цилиндров | 1977 |
|
SU656858A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Устройство для транспортировки покрышек | 1976 |
|
SU679489A1 |
| Устройство для адрессования грузов | 1971 |
|
SU443823A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| Устройство для загрузки конвейера | 1986 |
|
SU1419964A1 |
да (- f о
.fmmmibfe me i
I.I .1 I l.il.l 1 l.4.i г I.YI|I . YI. . yl.1 r ytl ,J
-rhrhrВиЭА
K-e
