(54) МЕХАНИЗМ ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для перемещения вагонеток | 1982 |
|
SU1133105A1 |
| Транспортно-перегрузочное устройство | 1991 |
|
SU1754586A1 |
| Кромкогибочная установка | 1990 |
|
SU1784339A1 |
| Передаточная тележка | 1990 |
|
SU1787882A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Транспортное средство | 1977 |
|
SU671173A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Транспортная система автоматизированного производственного комплекса | 1986 |
|
SU1421493A1 |
| Перегрузочное устройство | 1987 |
|
SU1519984A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |

Изобретение относится к транспортным устройствам и может быть использовано в промышленности стро итёльных атериалов, а TakKe в других отраслях-промышленности. . Известен штанговый конвейер, сод жащий толкатель, снабженный упорами воздействующими на груз поочередно Недостаток такого конвейера небольшой полезный (рабочий) ход толкателя. Наиболее близким к описаываеМс 1у изобретению является механизм для перемещения грузов содержащий толкатель я ползуны, контактирующие с упорами, смонтированными на осях вращения 12, Однако конструкция указанного механизма сложна, так как двуплечий рычаг снабжен двумя подпружиненными упорами и копирами, а ползун нмеет профилированную поверхность. Кроме того, толкатель имеет небольшой рабочий ход. Целью изобретения является упрощение конструкции механизма. Цель достигается тем, что каисдагй ползун изготовлен в виде смонтированной на осях вращения качалки, в которой выполнено окно с фиксируго щими плоскостями, а каждый упор выполнен в виде поворотного двуплечего рычага, одно плечо которого размещено в окне качалки с возможностью поочередного взаимодействия с фиксирующими плоскостями. На фиГс изображен предлагаемый механизм в сечении; на фиг.2 - то же, сечемие А-А на фиг.1; на фиг.З вариант установки механизма на передаточной тележке; на фиг,4 - то же, разрез Б-Б на фиг„3. Механизм для перемещения грузов содержит толкатель 1, снабженный упором 2, Свободное плечо 3 упора 2 располсекено в окне 4 качалки 5, связанной со штоком привода 6 перемещения,Окно 4 выполнено с фиксирующими плоскостями 7 и 3, Йачалка 5 установлена на осях 9, а упор 2- на оси 10, При этом ось 10 расположена выше оси 9. Ось 9 необходимо располагать вшае нижней точки В касания контактирующей плоскости плеча 3 упора 2, При установке тапкателя 1 на пере-. даточной тележке- 11 его связывают с цепным приводс 1 12, Механизм для перемещения грузов работает след тощим образом.
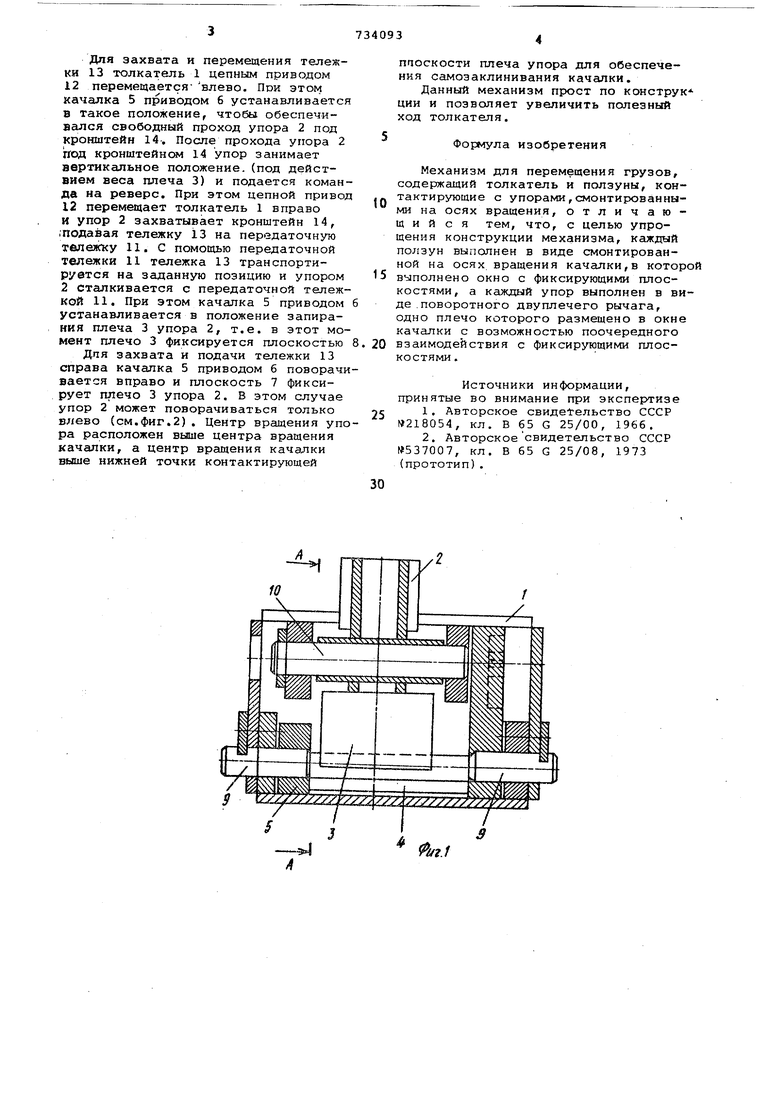
Для захвата и перемещения тележки 13 толкатель 1 цепным приводом 12 перемещаетсявлево. ПРИ этом качалка 5 приводом 6 устанавливается в такое положение, чтобы обеспечиаался свободный проход упора 2 под кронштейн 14. После прохода упора 2 ггод кронштейне 14 упор занимает вертикальное положение,(под действием веса плеча 3) и подается команда на реверс. При этом цепной привод 12 перемещает толкатель 1 вправо и упор 2 захватывает кронштейн 14, ,подавая тележку 13 на передаточную тележху 11. с помощью передаточной тележки 11 тележка 13 транспортируется на заданную позицию и упором 2 сталкивается с передаточной тележкой 11. При этом качалка 5 приводом устанавливается в положение запирания плеча 3 упора 2, т.е. в этот момент плечо 3 фиксируется плоскостью
Дня захвата и подачи тележки 13 справа качалка 5 приводом б поворачивается вправо и плоскость 7 фиксирует плечо 3 упора 2. В этом случае упор 2 может поворачиваться только влево (см.фиг.2). Центр вращения упора расположен выше центра вращения качалки, а центр вращения качалки выше нижней точки контактирующей
паоскости плеча упора для обеспечения самозаклинивания качалки.
Данный механизм прост по конструк ции и позволяет увеличить полезный ход толкателя.
Формула изобретения
Механизм для перемещения грузов, содержащий толкатель и ползуны, контактирующие с упорами,смонтированными на осях вращения, отличающийся тем, что, с целью упрощения конструкции механизма, каждый ползун выполнен в виде смонтированной на осях вращения качалки,в которой выполнено окно с фиксирующими плоскостями, а каждый упор выполнен в виде .поворотного двуплечего рычага, одно плечо которого размещено в окне качалки с возможностью поочередного 0 взаимодействия с фиксирующими плоскостями .
Источники информации, принятые во внимание при экспертизе
