Изобретение относится к автома,тическому управлению и может быть использовано в системах гидроавтоматики.
Известны пневматические позиционеры, содержащие пневмоцилиндр,шток которого через датчик обратной связи соединен с устройством задания величины перемещения, соединенным со следящим золотниковым распределителем, выходы которого подключены ъ, полостям пневмоцилиндра
Однако известные устройства характеризуются низкой скоростью позиционирования, так как при ее увеличении, нарушается устойчивость привода.
Наиболее близким к предлагаемому является пневматический позиционер, содержащий пневмоцилиндр, датчик ббратной связи, соединенный со штоком пневмоцилиндра и задатчиком, следящий распределитель, золотник которого соединен с задатчиком, а выходы - с полостями пневмоцилиндра, и установленное на штоке фиксирующее устройство с демпферами и приводом 2 .
Недостаток устройства - низкая точность позиционирования, так как момент фиксации штока Зависит От ско
рости перемещения поршня, времени прохождения сигнала к приводу фиксирукяцего устройства и от сил сцепления фиксирующего устройства со штоком.
Целью изобретения является повышение точности позиционирования.
Указанная цель достигается тем, что в пневматическом позиционере,
10 содержащем пневмоцилиндр, датчик обратной связи, соединенный со штокрм пневмоцилиндра и задатчиком, следящий распределитель, золотник которого соединен с задатчиком, а выхо15ды - с полостями пневмоцилиндра, и установленное, на штоке фиксирующее устройство с демпферами и приводом, в торцах корпуса следящего распределителя установлены нормально от20крытые контакты, выходы которых через последовательно соединенные элемент ИЛИ и усилитель связаны с приводом фиксирующего устройства.
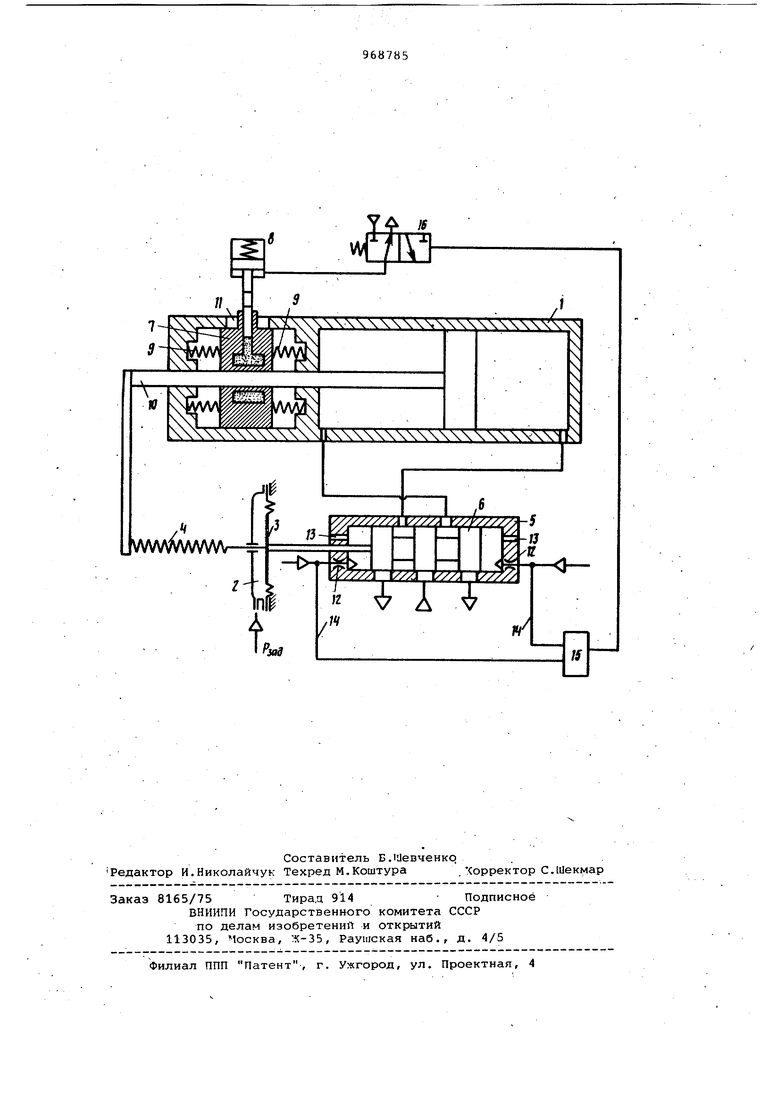
На чертеже показана конструкция
25 пневматического позиционера.
Устройство содержит пневмоцилиндр 1, задатчик 2 с измерительной мембраной 3, датчик обратной связи в виде пружины 4, следящий распределитель 5
30 со следящим золотником 6 и фиксирующее устройство 7, выполненное в .виде гидромуфты с приводом 8 и демпферами 9. Полости цилиндра 1 соединены с в ходами следящего распределителя 5. Шток 10 пневмоцилиндра через датчик 4 обратной связи соединен с задатчи ком 2 и через мембрану 3 со следящи золотником б. Гидромуфта фиксирующего устройст ва 7 установлена на штоке 10 цилинд ра с возможностью осевого смещения совместно со штоком в пределах,огра ниченных упорами 11 В торцах корпуса следящего распр делителя 5 установлены нормально открытые контакты 12 для взаимодейс вия с торцами золотника 6 в его кр них положениях. Контакты 12 выполне ны, например, в виде сопел, соедине ных с источником питания, выходная струя которых направлена перпендикулярно к сЬответствующим т.орцевым поверхностям золотника 6. Для сброс в атмосферу воздуха, поступающего в торцевые полости распределителя чер открытое сопло, в корпусе распределителя выполнены отверстия 13. Выходы 14 пневмоконтактов 12 соед нены с элементом ИЛИ 15, выход кото рого через усилитель 16 соединен с приводом 8 фиксирующего устройства Входной сигнал определяющий требуемое положение штока 10, подае ся на вход задатчика 2. Пневматический Позиционер работа следующим образом. При постоянном неизменном значе. НИИ Р5дд мембрана 3 задатчика 2 находится в равновесии под действием давления воздуха РЗОА усилия пружины датчика 4 обратной связи. Золотник 6 занимает нейтральное положение .и перекрывает каналы подвода воздуха к полостям цилиндра 1 таким образом, что положение выходного штока 10 соответствует заданной позиции. Сжатый воздух, поступающий через сопла пневмоконтактов 12 в торцевые полости след.ящего распределителя 5, истекает в атмосферу .через отверстия 13, и на выходе .элемента ИЛИ 15 сигнал отсутствует. Привод 8 фиксирующего устройства включен, и шток пнеймоцилиндра зажат гидромуфтой. При изменении входного сигнала например при увеличении прямом ходе, равновесие мембраны 3 нарушается. Следящий золотник смещается вправо, .открывая доступ сжатого воздуха в бесштоковую полость цилинд ра 1. Смещение золотника 6 происходит до упора в корпус следящего распределителя 5, и золотник своим торцам перекрывает правый пневмоконтакт 12, сигнал от которого через элемент ИЛИ 15 и усилитель 16 поступает к приводу 8 фиксирующего уст- . ройства. При этом происходит разжим штока и быстрое его перемещение к заданной позиции за счет увеличения проходных сечений следящего распределителя 5. При подходе к заданной позиции пружина датчика 4 обратной связи стремится уравновесить мембрану 3, золотник отходит от торцевой стенки распределителя 5, размыкая контакт 12. Сигнал на выходе элемента ИЛИ 15 исчезает, и гидромуфта фиксирующего устройства 7 вновь зажимает шток. Дальнейшее перемещение штока происходит совместно с фиксирующим устройством. Окончательное позиционирование штока осуществляется следящим золотником на замедленной скорости благодаря демпфирующему воздействию пружин демпферов 9. Несмотря на увеличенные проходные сеЧения золотника происходит быстрое затухание переходного процесса. Таким образом, при повышении точности позиционирования привода по сравнению с известным устройством использование предлагаемого изобретения позволяет значительно повысить производительность автоматизируемого оборудования и расширить его функциональные возможности. Формула изобретения Пневматический позиционер, содержащий пневмоцилиндр, датчик обратной связи, соединенный с шгоком пневмоцилиндра и задат.чиком, следящий распределитель, золотник которого соединен с задатчиком, а выходы - с полостями пневмоцилиндра, и установленное на штоке фиксирующее устройствр с демпферами и приводом, отличающийся тем, что, с целью повышения точности позиционирования, в торцах корпуса следящего распределителя установлены нормально открытые контакты, выходы которых через последовательно соединенные , элемент ИЛИ и усилитель связаны с приводом фиксирующего устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 398763, кл. F 15 В 9/16, 1971. 2.Авторское свидетельство СССР 595703-, кл.С 05 В 11/18, 1976 (прототипJ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционер | 1986 |
|
SU1388831A1 |
| Устройство для позиционирования пневмопривода | 1977 |
|
SU734609A1 |
| Пневматическое устройство для управления процессом дозирования | 1985 |
|
SU1270753A2 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Пневматический следящий привод | 1985 |
|
SU1249207A1 |
| Устройство для позиционирования пневмопривода | 1980 |
|
SU928303A1 |
| Устройство для позиционирования пневмопривода | 1976 |
|
SU595703A1 |
| Следящий позиционный пневмопривод | 1983 |
|
SU1110946A1 |
| Система регулирования температуры теплоносителя двигателя внутреннего сгорания | 1991 |
|
SU1813893A1 |