Изобретение относится к управлению многодвигательными приводами с независимо управляемыми группами двигателей, обеспечивающими позиционное управление рабочим органом, В настоящее время перемещение ковщ драглайна в вертикальной плоскости осуществляет мащинисч-, независимо управ-ляя двумя приводами подъема и тяги« Пр подъеме груженного ковща машинист про водит его по траектории, достаточно бли кой к стреле, чтобь; не допустить само- разгрузки ковша и удара по близкому к стреле отвалу. В то же время приближение ковша к стреле должно быть ограничено во избежание возможных ударов о стрелу или возникновения недопустимых нагрузок в стреле. Известны способы автоматического управления перемещением ковша, позволяющие получить приемлемые траектории подъема груженого: ковша. Все они осно ваны на том, что один из приводов, чаще привод подъема, является ведушдм. а второй привод подчиняется ему, Taic, например, известен способ управления перемещением ковша непосредстБенно по KoopAKHHTaMj в качестве которых используются длины канатов ill, Этот способ нашел применение только для ограничения приближения ковша к стролз. Наиболее близким техническим решеHiiBM к предлагаемому является, способ Совместного управления приводакда подьема и тяги, основанный на измерении нагрузок электроприводов подъема и тяги и управления электроприводом тяги в функ.Щ1и величины указанных, нагрузок | Недостатком этого способа является прежде всего сложность реализации. Другим недостатком является то, что точ- ность позиционного управления рабочим органом в рабочей зоне существенно понижается вследствие влия1шя его загрузки на опредеатяемые координаты его положениял так при этом способе компенсация влияния его загрузки осу-
ществляется только на границе рабочей зоны, а это снижает надеж.ность упра.вле ния. Кроме того, этот способ не обеспэчивает реш.эния задачи перемещения рабочего органа по требуемой заданной траектории в рабочей зоне и. при BEITOматизации этого режима. В связи- с чем при наличии существенных ограничений в рабочей зоне, для исключения ЕЛНЯНИЯ аварийного выхода за ее пределы практически неизбежно движение с пониженными скоростями, что снижает производительность машины,
Цель изобретения- - повьпиение надежности, производительности и упрощение управления.
Поставленная цель достигается теМ( что в способе взаимного регулирования электроприводов подъема и тяги эксксьватора-драглайна, заключаюш.емся в
измерении нагрузок электроприводов подъем и тяги и управлении электроприводом тяги в функции величины указанных, нагрузок, дополнительно определяют отношение величины нагрузки привода тяш к величине нагрузки привода подъема и управляющий сигнал для привода тяги формируют как разность полученного отношения и его заданного значения При этом заданное значение выбкракхг в пре- дмгах 0,3-О,65 отношения моментов нагрузок двигателей.
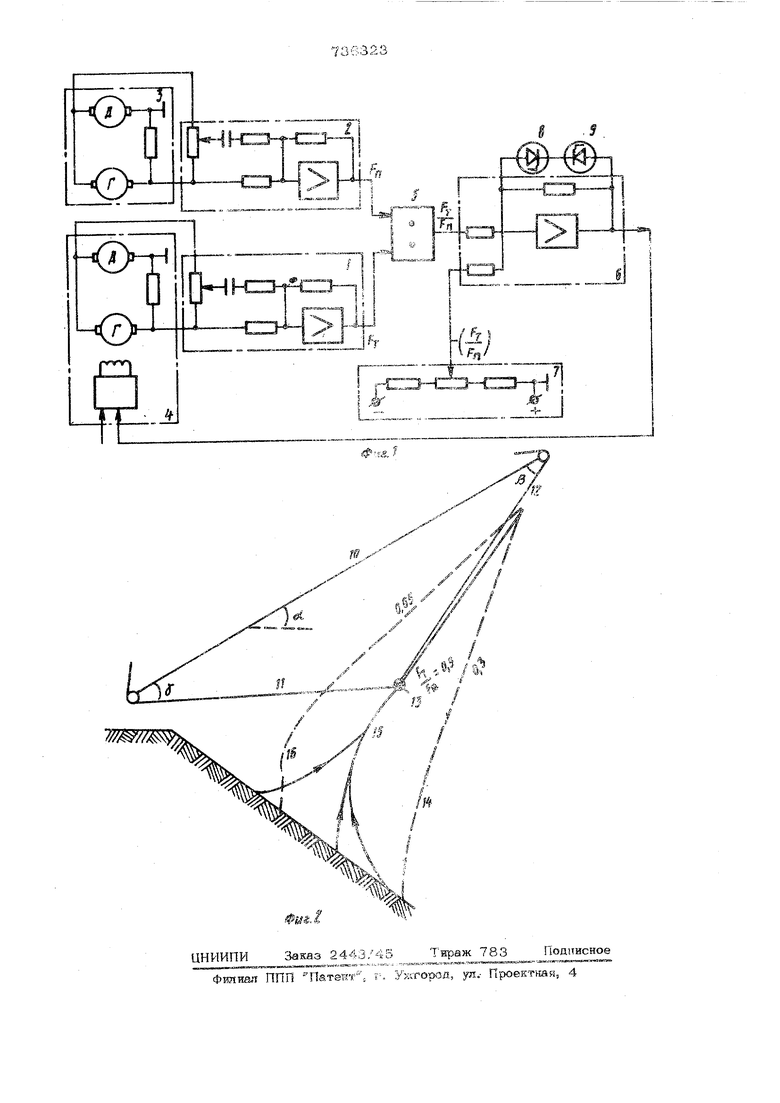
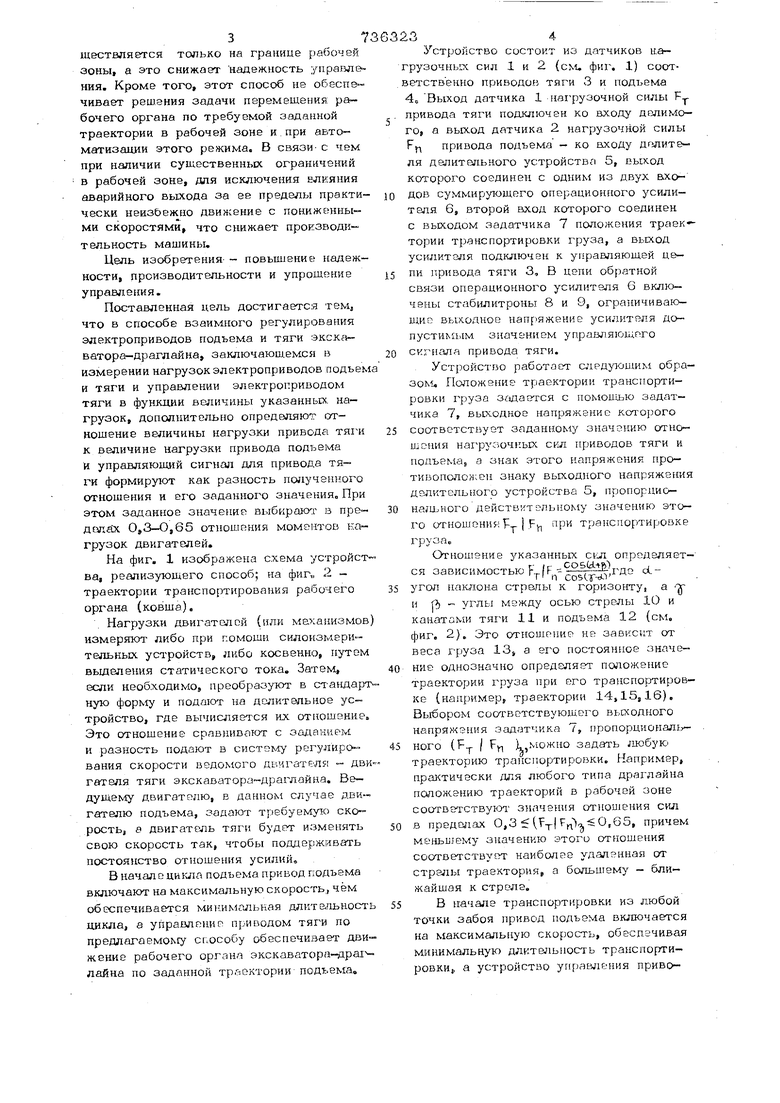
На фиг. 1 изображена схема устройства, реализующего способ; на фиг,, 2 - траектории транспортирования рабочего
органа (ковша).
Нагрузки двигателей (или механизмов измеряют либо при помощи силоизмери- тельных устройств, либо косвенно, путем вьщеления статического тока. Затем,
еслк необходимо, преобразуют в стандартную форму и на долит эль но е устройство, где вычисляется их отношение Это отношение сравнивают с заданием и разность подают в систЕ /гу регулирования скорости ведомого двигателя - двигателя тяги экскаватора-драглайна. Ведущему двигателю, в данном случае двигателю подъема, задают требуемую скорость, а двигатель тяги будет изменять свою скорость так, чтобы поддерживать постоянство отношения усилий,
В начал ецищ1а подъема привод подъема включают на максимальную скорость,, чем обеспечивается минимальная длите,пьность цикла, а управление приводом тяги по предлагаемому способу обеспечивает движение рабочего органа экскаватора-драг лайна по заданной траектории подъемЯе
Устройство состоит из датчиков Еагрузочньк сил 1 и 2 {см. фиг. 1) соответственно приводов тяги 3 и подъема 4, Въ1ход датчика 1 нагрузочной силы F привода тяги подключен ко входу ДЕЗЛИМОго, а выход датчика 2 нагрузочной силы FV привода подъема - ко входу дгшите- ля делительного устройства 5, выход которого соединен с одним из двух входов суммирующего операционного усилителя 6, второй вход которого соединен с выходом задатчика 7 положения траектории транспортировки груза, а выход усилитзля подключен к управляющей цепи привода тяги 3, В цепи обратной связи операционного усилителя 6 включены стабилитроны 8 и 9, ограничивающие выходное нап :1яженяе усилителя допустимым значением управлягощпго сигнала привода тяги.
Устройство работает следующим образом. Положение траектории транспортировки груза ЗсЩае-тся с помоишю задат- чика 7, .одное напряжение которого соответствует заданному значению отношения нагрузочньос скл приводов тяги и подъема а знак этого напряжения про- тивопслон;еп знаку выходного напряжения делительного устройства 5, пропорционального действительному значению этого отношения F I F) при транспортировке груза.
Отношение указанных cvji определяется зависимостью .2,гдо oLугол наклона стрелы к горизонту; а от н Г) углы мэжду осью стрелы 10 и канатами тяги 11 и подъема 12 {см. фиг. 2). Это OTHOuieime не зависит от веса груза 13, а его постоянное значение однозначно определяет положение траектории груза при его транспортировке (например, траектории 14,15,16). Выбором соответствующего вьсходного напряжения задатчика 7, фоаорционал1 - ного {F- I Fj I,можно задать любую траекторию транспортировки. Например, практически для любого типа драглайна положению траекторий в рабочей зоне соответствуют значени.я отношения сил Б пределах 0,3 (F-p| ,65, причем MDHbujeMy значению этого отношения соответствуй наиболее удаленная от стрелы траектория, а большему - ближайшая к стреле,
В начале транспортировки из любой точки забоя привод подъема включается на максимальную скорость, обеспечивая минимальную длительность транспортировки а устройство управления приво- 57 дом тяги автоматически обеспечиваот движение груза по заданной тр аектории, не требуя вмешательства машиниста. При появлении отклонения груза от заданной траектории, например, в начале транспортировки, действитапьное значение отношения Fyl F, , определяемое с помощью датчиков нагрузочных сил 1 и 2 и тельного устройства 5, отличается от заданного значения этого отношения (г I )}, 3 выходе суммирующего операционного усилителя 6 появляется сигнал, который изменяет скорость привода тяги так, что груз 13 возвращается на заданную траекторию. При большах начальных рассогласованиях выходной сигнал усилителя 6 момсет превышать допустимое значение управляющего сигнала привода тяги, для ограничения которого в цепи обратной связи усилителя установлены стабилитроны 8 и 9, При отсутствии дополнительных ограничений, например, близкого к стреле отвала, м.ожно с помощью задатчика 7 задать траекторию, удаленную от стрелы например, соответствующую()оу О,3, что позволяет разгрузить приводы подъема и тяги при транспортировке, а при близком к стреле отвале выбрать более близкую к стреле траекторию, соответствующую большим значениям { FT / , . Как показал анализ, значению C-rfFnV 0,5 соответствует траектория обеспечивающая быстрый выход груза из узкого забоя и дальнейшую транспортировку 36 в зоне выше наиболее близкого реального возможного положения отпала, т.е. эта траектория является универсальной пля любых условий работы. Таким образом, устройство обеспечивает максимальную производительность и повышает надежность управления, исключая возможность захода груза в аварийные зоны при всех реально возмож- чых ограничениях. Формула изобретения Способ взаимного регулирования электроприводов подъема и тяги экскаватора-драглайна, заключающийся в измерении нагрузок электроприводов подъема и тяги и управлении электроприводом тяги в функции величины указанных нагрузок, отличающийся тем, что, с целью повышения надежности, производительности и упрощения управления, определяют отношение величины нагрузки привода тяги к величине нагрузки привода подъема и управляющий сигнал для привода тяги формируют как разность полученного отношения и его заданного значения, Ис1-очники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 186551, кл. 05 В 11/00, 1963, 2,Авторское свидетельство СССР № 202281, кл, Н О2 Р 5/ОО, 1964,
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| СПОСОБ ВЗАИМОСВЯЗАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ПОДЪЕМА И ТЯГИ ДРАГЛАЙНА | 1967 |
|
SU202281A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| СПОСОБ ЗАЩИТЫ ТЯГОВОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ КРИТИЧЕСКИХ НАГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА О'АЛЕКС,А) | 1994 |
|
RU2082855C1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Устройство для управления электроприводами подъема и тяги экскаватора- драглайна | 1978 |
|
SU765957A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |