Изобретение относится к электротехнике и может быть использовано для управления электроприводами подъема и тяги драглайна, а также может быть применено для управления многодвигательными .электроприводами с независимыми управляемыми группами двигателей, обеспечивающими позиционное управление рабочим органом.
Известно устройство для управления многодвигательным электроприводом, содержащее датчики моментов нагрузки приводов подъема и тяги драглайна, два суммирующих усилителя, два подключенных ко входу первого суммирующего усилителя датчика скоростей приводов подъема и тяги, блок деления, блок дифференцирования, нелинейный блок и блок сравнения, причем выходы датчиков моментов нагрузки приводов подъема и тяги подключены ко входу первого суммирующего усилителя, ко входу которого подключен также выход блока сравнения, два входа которого соединены с выходами датчика момента нагрузки привода подъема и нелинейного блока, подключенного к
выходу блока деления, входы делимого и делителя которого соединены с выходом блока дифференцирования, подключенного к выходу датчика момента нагрузки привода подъема, и с выходом второго суммнрукицего усилителя, два входа которого подключены к выходам датчиков скоростей приводов подъема и тяги ll.
to
Однако устройство отличается сложностью, недостаточной точностью и надежностью управления, так как, ограничивая выход ковша за пределы рабочей зоны, оно не обеспечи15вает транспортировку ковша по требуемой траектории.
Наиболее близким к изобретению по технической сущности и достигаемому результату является известное
20 устройство для управления многодвигательным электроприводом, например электроприводами подъема и тяги драглайна, содержащее датчики момента нагрузки электроприводов подъема
25 и тяги, суммирующий усилитель с блоком ограничения в цепи его обратной связи, источник постоянного напряжения и подключенный к его выходу элемент задания отношения моментов нагрузки электроприводов, блок деления, к двум входам которого подключены выходы датчиков момента нагрузки электроприводов подъема и тяги, а его выход подключен к первому входу суммирующего усилителя, ко второму входу которого подключен выход элемента задания отношения моментов нагрузки электроприводов, а выход соединен со входом управления электропривода тяги 2.
Это устройство то же отличается недостаточной точностью и надежностью управления,, определяемой тем, что с уменьшением величин моментов нагрузки электроприводов тяги и подъема уменьшается точность определения их отнесения с помощью блока деления, увеличивается влияние колебаний моментов нагрузки, определяемых наличием упругих механически связей, возможность появления перерегулирований и колебаний ковша, так как в устройстве не учитывается скорость его приближения к заданной траектории, возможность появления ложных сигналов управления в режиме копания, когда отношение моментов нагрузки значительно больше, чем в режиме транспортировки ковша.
Цель изобретения - повышение точности и надежности управления..
Это достигается тем, что в устройство для управления электроприводами подъема и тяги драглайна, содержащее датчики моментов нагрузки электроприводов подъема и тяги, суммирующий усилитель с блоком ограничения в цепи его обратной связи источник постоянного напряжения и подключенный к его выходу элемент задания отношения моментов нагрузки электроприводов, введены блок перемножения, элемент сравнения, фильтр низких частот, разомкнутый операционный усилитель со стабилитроном в цепи его обратной связи, пропорционально-дифференциальный усилитель и регулируе1Фзй блок ограничения, причеУл два входа суммирующего усилителя подключены к выходам датчика моменту нагрузки электропривода тяги и блока перемножения, входы которого соединены с выходами суммирукицёго усилителя и элемента сравнения, входы последнего соединены с выходами датчика момента нагрузки электропривода подъема и источника постоянного напряжения, выход сум мируюадего усилителя через фильтр низких частот подключен ко входам пропорционально-дифференциального усилителя и разомкнутого оперсщнонного усилителя, ко входу последнего поключен выход источника постоянного напряжения, а его выход соединен с управляющим входом регулируемого блока ограничения, включенного в цепи обратной связи пропорционально-дифференциального усилителя, ко входу которого подключен выход элемента задания отношения моментов нагрузки электроприводов, а его выход подключен к управляющему входу электропривода тяги.
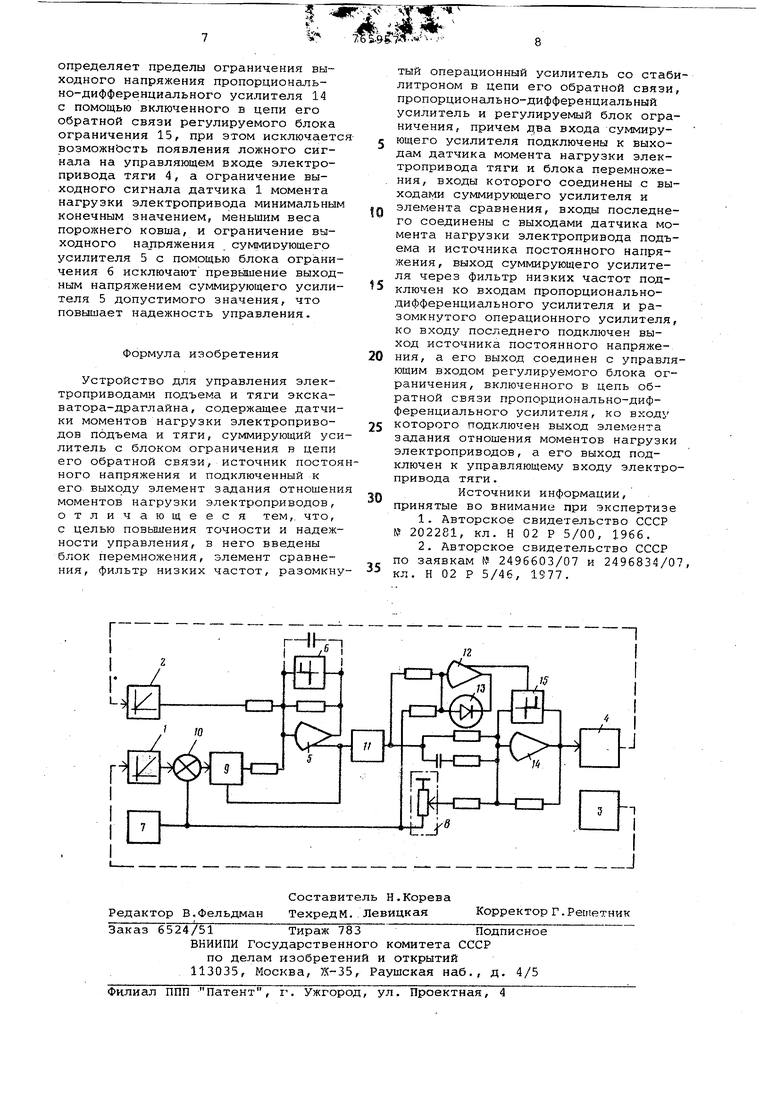
Сущность изобретения поясняется чертежом, на котором приведена функциональная схема предложенного устройства.
Устройство для управления электроприводами подъема и тяги экскаватора- дра Яайна содержит датчики 1 и 2 моментов нагрузки электроприводов подъема 3 и тяги 4, суммирующий усилитель 5 с блоком ограничения 6 в цепи его обратной связи, источник 7. постоянного напряжения и подключенный к его выходу элемент 8 задания отношения моментов нагрузки электроприводов, блок перемножения 9, элемент сравнения 10, фильтр низких частот 11, разомкнутый операционный усилитель 12 со стабилитроном 13 в цепи его обратной связи , пропорционально-дифференциальный усилитель 14 и регулируемый бло ограничения 15, причем два входа суммирующего усилителя 5 подключены к выходам датчика 2 и блока перемножения 9, входы которого соединены с выходами суммирующего усилителя 5 и элемента сравнения 10, входы последнего соединены с выходами датчика 1 и источника 7, выход суммирующего усилителя через фильтр 11 подключен ко входам пропорционально-дифференциального усилителя 14 и разомкнутого операционного усилителя 12, ко входу последнего подключен выход источника 7, а его выход соединен с управляющим входом регулируемого блока ограничения 15, включенного в цепи обратной связи пропорционально-дифференциального усилителя 14, ко входу которого подключен выход элемента 8, а его выход подключен к управляющему входу электропривода тяги 4.
Устройство работает следующим образом.
На первый вход суммирующего усилителя 5 поступает , пропорционбшьшй моменту Мт нагрузки электропривода тяги с выхода датчика 2 этого момента. На второй вход сулвлируюЩего усилителя 5 поступает через блок перемножения 9 с выхода элемента сравкения 10 сигнал, пропЬ{ ционс1Льшй разности максимальног значения момента нагрузки электропрвода подъема М рпределяемого поступающим на вход элемента сргшнёния 10 выхаднам напряжением источника 7, и фактического значения этого момента нагрузки М„, определяемого поступающим на вход элемента сравнения 10 выходным сигна)юм датчика 1.
Тогда выходное напряжение суммирующего усилителя 5 пропорциональ но отношению моментов нагрузки электроприводов тяги и подъема
л
где К„ - коэффициент усиления суммирующего усилителя 5 по первому входу;
К,.- коэффициент усиления сул1мирующего усилителя 5 по второму входу; . коэффициент блока перемно cfnжения 9,
К - масштабный коэффициент моментов нагрузки электроприводов; если коэффициент усиления суммирующего усилителя 5 по второму.входу выбирать в соответствии с
условиемК - к -к-{А„
° макс Изменение веса ковша приводит к
пропорциональному изменению моментов нагрузки электроприводов подъема и тяги, а сигналы на первом и втором входах суммирующего усилителя 5 изменяются при этом в противоположных направлениях, сохраняя постоянство суммы входных сигналов суммирующего усилителя 5 при постоянстве отношения моментов нагрузки электроприводов тяги и подъема и соответствующем ему положении траектории ковша. Это повышает точность и надежность управления практически независимо от веса ковша и соответствующих ему значений моментов нагрузки электроприводов на заданной траектории .
Фильтр 11 обеспечивает фильтрацию сигнала помех, присутствующих в выходном напряжении суммирующего усилителя 5 и выз ываемых наличием упругих связей между двигателями электроприводов подъема и таги и рабочим органом, что может приводить к колебаниям моментов нагрузки электроприводов подъема и тяги, искажающим информацию об отношении этих моментов нагрузки, характеризующем положение траектории ковша. Фильтрация этих помех повшаает точность и надежность управления.
ходной сигнал фильтра 11, пропорциональный отнесению моментов нагрузки электроприводов тяги и подъема, вместе с выходным сигналом элемента 8 поступает на вход пропорционально-дифференциального усилителя 14, выходной сигнал которого, пропорциональный сумме рассогласования указанного отнстюния моментов нагрузки и его производной, поступает на управлянвдий вход электропривода тяги 4 и обеспечивает тайое изменение его скорости, благодаря
которому указанное рассогласование стремится к нулю, а ковш переходит на определяемую заданным значением отношения моментов нагрузки электроприводов тяги и подъема требуемую траекторию при любом характере движения электропривода подъема 3 (перемещение электропривода подъема является возмущающим для описанной системы управления, так как оно стремятся увести ковш с заданной
0 траектории).
Изменение управлянвдего сигнала электропривода тяги 4 пропорционально производной рассогласования, Обеспечиваемое пропорционально-дифsференциалыйлм усилителем 14, уменьшает этот ущ)авляющий сигнал при приб.ттж§ннй ковша к заданной траектории, что исключает перерегулирований и 1{олебания во время переходно0го процесса и тем самым повышает точность и надежность управления.
Отношение моментов нагрузки электроприводов тяги и подъема в процессе транспортировки ковша всегда меньше единицы, а в пределах рабо5чей зоны обычно не превышает величины 0,7. Сигнал, пропорциональный этому отношению, поступает с выхода фильтра 11 на вход разомкнутого операционного усилителя 12, на дру0гой вход которого с противоположным знгисом поступает с выхода источника 7 сигнал, пропорциональный максимальному (и практически не достижимому в процессе транспортиров
5 ки ковша) значению этого отношения моментов нагрузки «электроприводов. В режиме транспортировки ковша, когда отношение MOivjeHTOB нагрузки электроприводов тяги и подъема
0 всегда меньше указанного максимешьного значения, выходной сигнаЛ разомкнутого операционного усилителя 12, величина которого определяется напряжением стабилизации включенного в цепи обратной связи этого
5 усилителя 12 стабилитрона 13, поступает на управляющий вход регулируемого блока ограничения 15, определя1Ш(его при описанной выше работе устройства максимаг1ьное значеOние выходного напряжения пропораиояально-дифференцисшьного усилителя 14, соответствующее допустимой скорости электропривода тяги. В режиме копания отношение момен5тов нагрузки электроприводов тяги и подъема больше единицы, разность сигналов на входе разсяикнутого операционного усилителя 12 меняет знак а его выходной сигнал при этом равен нулю, так как цепь об0ратной связи разомкнутого операционного усилителя 12 закорачивается работакицим в режиме диода стабилитроном 13. Выходной сигнал разомкнутого операционного усилителя 12
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ взаимного регулирования электроприводами подъема и тяги экскаватора-драглайна | 1977 |
|
SU736323A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Устройство взаимосвязанного управленияэлЕКТРОпРиВОдАМи пОд'ЕМА и ТягиэКСКАВАТОРА-дРАглАйНА | 1978 |
|
SU815155A1 |
