1
Изобретение относится к области станкостроения и может быть исиользовано в многооперационных станках типа «обрабатывающий центр для комплексной обработки деталей.
Известно устройство для автоматической смены инструмента, содержаш,ее механическую руку с наклонной по отношению к оси шпипделя и магазина осью поворота и с двумя захватами, установлепными на каретке, возвратно-поступательно перемещающейся в плоскости, перпендикзлярной оси шнинделя и магазина 1.
По сигналу об окончании обработки детали плита иоворачивается на 180°, каретка подходит к щпипделю станка и производит съем отработавшего инструмента, после чего каретка перемещается перпендикулярно наиравлению иеремещения к шиинделю станка, подводит новый ипструмент к шпинделю, в котором и устанавливает этот элемент.
В.связи с наличием перемещеиия, иерпеидикулярного наиравлению перемещения к шпинделю станка, время смены инструмента велико.
Целью изобретения является сокращение времени смены инструмента.
Указанная цель достигается тем, что в устройстве для автоматической смеиы инструмента, содержащем механическую руку с наклонной по отношению к оси шпинделя и магазина осью иоворота и с двумя захватами, установленными на каретке, воз5 вратно-поступательно перемещающейся в плоскости, перпендикулярной оси шпинделя и магазина, каждый из захватов устаиовлеи на каретке с возможностью поворота в плоскости, перпендикулярной плоскостп пе10 ремещеиия каретки, и связаи кинематически с общим приводом поворота, а их оси поворота расположены под }.тлом одна к Другой.
На фиг. 1 изображено устройство, общий
15 вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - цикл смеиы инструмента.
Устройство для автоматической смены ииструмента в шпипделе металлорежущего стайка содержит мехаиическую руку с или20 той 1, закрепленной на оси 2 в неподвижном корпусе 3.
На направляющих 4 плиты 1 з становлеиа каретка 5 с размещенными в ней осями 6 и 7, на каждой из которых закреилеиы
25 соответственно захваты 8 и 9, а также коиические шестерни 10 и 11.
Приводом иеремещеиия каретки 5 является гидроцилиндр, иорщень цилиндра 12 которого смонтироваи на илите 1.
30 На оси 2 установлена щестерня 13, находящаяся в зацеплении с рейкой 14 привода поворота механической руки (не показан).
Конические шестерни 10 и 11 кинематически связаны между собой конической шестерней 15, приводом которой является связанная с ней цилиндрическая шестерня 16, находящаяся в зацеплении с рейкой обшего привода поворота 17 захватов 8 и 9.
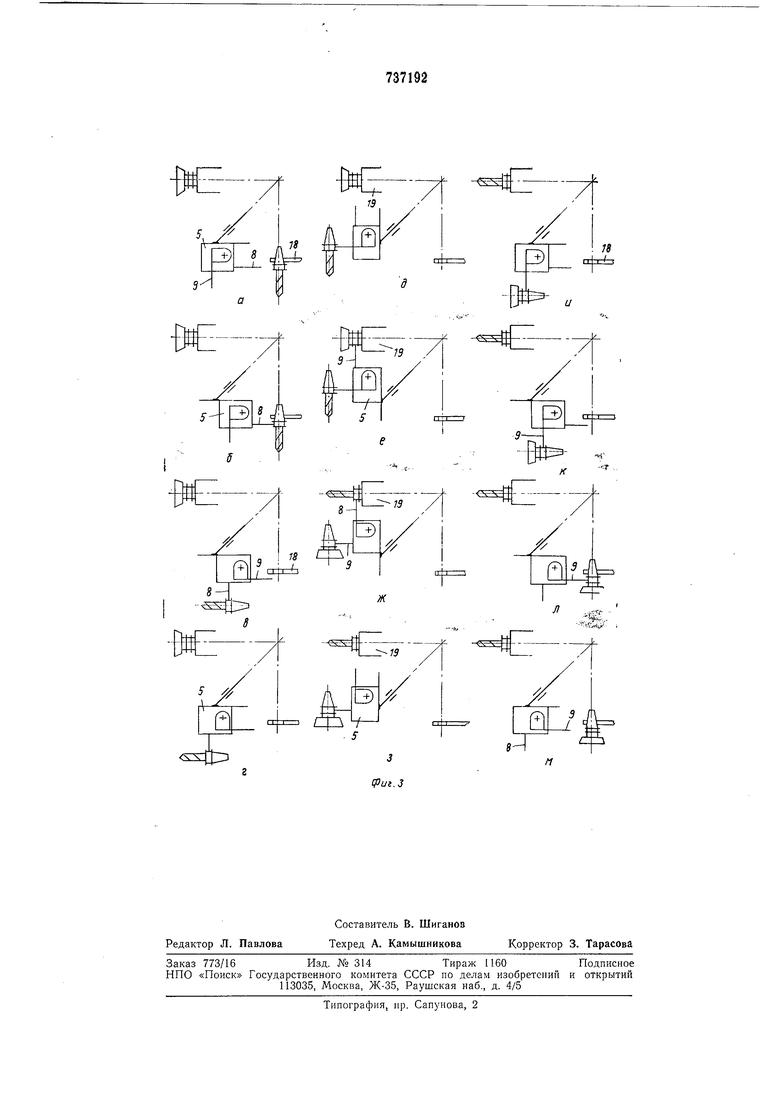
Предлагаемое устройство работает следующим образом.
В исходном положении (фиг. За) устройство повернуто к магазину 18, каретка 5 отведена в заднее положение (от магазина), захваты 8 и 9 разведены в разные стороны. В этом положении магазин 18 может свободно вращаться для поиска иужного инструмента.
Когда инструмент найден, каретка 5 перемеи(,ается вперед, вводя захват 8 в кольцевой паз инструмента (фиг. 36). После зажима ииструмента в захвате 8 (зажим не показаи) последний вынимает инструмент из магазина 18, иеремеи.1аясь по дуге, а захват 9 становится на место захвата В (фиг. 30). Каретка 5 отводится в заднее положение (фиг..3г), и зстройство поворачивается к шпинделю 19 (фиг. 3d).
После завершения очередной операции обработки изделия по команде на смену инструмента каретка 5 перемещается вперед (к шпинделю), вводя пустой захват 9 в паз ииструмеита, находящегося в шпинделе 19 (фиг. Зе). Инструмент зал имается в захвате 9 и отжимается в шпииделе 19.
Захват 9 вынимает отработавший ииструм.ент из шпинделя 19, а захват 8 вставляет в него новый (фиг. Зж. Инструмеит зажимается в шпииделе 19 и отжимается в захвате 8. Каретка 5 отводится назад (фиг. Зз), давая возможность
шиинделю 19 начать следующую операцию обработки изделия.
Устройство поворачивается к магазину 18
(фиг. 3«), и захват 9 вставляет отработавший инструмент в гнездо магазина 18 в
порядке, обратном выемке предыдущего
(фиг. Зк, л, м).
Расположение осей поворота захватов под углом друг к другу при наличии общего
привода, связанного с ними, позволяет обоим захватам поочередно взаимодействовать либо со щпинделем, либо при повороте устройства с магазином. Закрепление на оси поворота плиты с направляющими и приводом для перемещения каретки позволяет захвату либо брать, либо отпускать инструмент, установленный в шпинделе или магазиие, и уходить захватам из зоны обработки.
Формула и 3 о б р е т е и и я
Устройство для автоматической смены инструмента, содержащее механическую руку с наклонной по отношению к оси
шиинделя и магазина осью поворота и с двумя захватами, установленными на каретке, возвратно-поступ-ательно перемещающейся в плоскости, перпендикулярной оси шиинделя и магазина, отличающееся
тем, что, с целью сокращения времеии смены инструмента, каждый из захватов установлен на каретке с возможиостью иоворота в плоскости, пернендикулярной плоскости перемещения каретки, и связан кинематически с общим приводом поворота, а их оси поворота расположены под углом одна к другой.
Источники ииформации, принятые во вннмание при экспертизе
1. Патент Яиоиии Л 50-16030, кл. 74A2I2, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ СМЕНЫ ИНСТРУМЕНТА | 1972 |
|
SU323884A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Координатно-сверлильный станок | 1981 |
|
SU1000218A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| МАНИПУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТОВ | 1973 |
|
SU407708A1 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство автоматической смены инструмента | 1982 |
|
SU1142253A1 |