1
/
Изобретение относится к намоточным механизмам машин для формования и приема химических волокон и касается устройств для сьема последовательно установленных на бобинодержателе намотанных паковок.
Известно устройство для сьема паковок, в котором на IjTOKe пневмоцилиндра укреплена скоба, с помощью которой сталкивается паковка с бобинодержателя ij . При этом скоба связана с направляющей для предотвращения разворота ее в момент сталкивания паковки. Указанное устройство может быть использован;о для паковок небольшой длинь.
Для намоточньсх устройств, в которых осуществляется намотка двух и более паковок большой длины на одном бобинодер- жателе, применение данного устройства нецелесообразно ввиду тлого, что для этого потребуются толкате,ли и направляющие с большим вылетом и установленные консольно. В связи с этим снижается надежность работы устройства.
Наиболее близким к описываемому изобретению по технической супшоШйи достигаемом результату я1вляется устройство для автоматического сьема последовательно установленных на б бинодержателе паковок , содержащее смонтйрованньгй с возможностью возвратно-поступательного перемещениявдоль оси па- 1 рвШ;РбШшей 11 е о приво с силбвьо органом, связаййый посредством испол10нительного механизма с приспособлением для раз кйма пшс6вок 2 .
-- Устройство предусматривает одновре1ЖШЖ - бобинодер15:жЙёЯЙ, Однако это является йед эстат 1 ком, поскольку в намоточных устройствах машин аля производства синтетичеойихвблрйрн необходим последовательньвй сьём пакбвок, так как это позволяетпри,
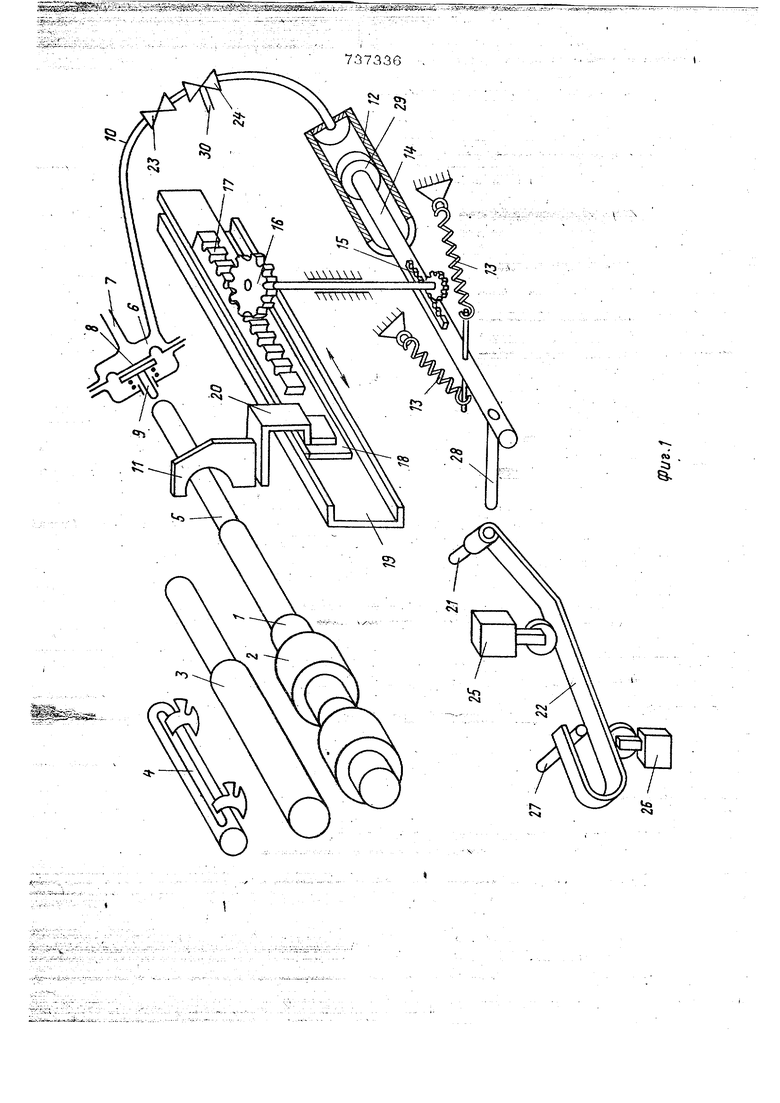
20 менять средства механизации приема отдёhbHbtx йЖовбй йа йрйёкйзый шпулярник. При этом упрощается обслуживание ма ШЙНЁё - ------ --.-. ,.-..-,.., 37 Целью изобретения является упрощение обслуживания за счет осуществления последовательного сьема паковок. Эта цель достигается тем, что устрой ство содержит средство для позиционного перемещения толкателя, имеющее консоль но установленную пластю1у и переключатели, связанные с пластиной посредством датчиков ее положения, при этом пласти- на и переключатели подсоединены к силовому органу привода толкателя. Силовой орган привода представляет собой пневмоцилиндр, шток которого подпружинен и посредством зубчато-реечной передачи связан с толкателем. Кроме того, Исполнительный механизм содержит источ ник сжатого воздуха и диафрагменную пневмокамеру, подсоединенную воздухо Пров о дом к пневмоцилиндру привода, при этом переключатели представляют собой пнввмбэлектрические клапаны и размещены в воздухопроводе, а шток пневмоцилин дра посредством закреплённого на его конце пальца связанс пластиной. Датчики положения пластины вьтолнены в виде микропереключателей. На фиг. 1 изображена общая схема устройства; на фиг. 2 - взаимное расположение пластины и датчиков после снятия первой паковки; на фиг. 3 - то же, после снятия второй паковки. На бобинодержателе 1 последовательно установлены паковки 2, наматываемы с помощью фрикционного цилиндра 3 и механизма 4 раскладки. С приспособлением для разжима паковок (не показано) бобинодержателя посредством штока 5 связан исполнительный механизм, содержаший диафрагменную пневмокамеру 6, соединенную патрубком 7 с источником сжатого воздуха (не показан). В пневмо камере 6 размещена мембрана 8 и подпружиненный шток 9. Воздухопроводом Ю пневмокамера 6 связана с силовым органом привода толкателя 11, установленного с возможност возвратно-поступательного перемещения вдоль оси паковок 2. Силовой орган пред ст1авляет собой пневмоцилиндр 12 .с подпружиненным пружинами 13 штоком 14, связанным посредством зубчато-реечной передачи 15 и шестерни 16 с рейкой 17 закрепленной на ползушке 18. Ползущка 18 установлена в неподвижной направляющей 19 и имеет кронштейн 20, на котором закреплен толкатель 11. Устройство содержит средство для позиционного перемещения толкателя, имею в щее консольно установленную на пси 21 пластину 22 и переключатели, гфелставляющие собой пневмоэЛектрич(;ские клапаны 23 и 24, размешенные в воздухопроводе 10. Клапаны 23 и 24 связаны с пластиной 22 посредством датчиков 25 и 26 положения ее, из которых датчик 25 установлен над пластиной и находится в контакте с ней, а другой датчик 26 размещен под ней с зазором, обра зованHbnvi с помощью ограничительного упора 27. Шток 14 пневмоцилиндра 12 связан с пластиной 22 посредством пальца 28, закрепленного на его конце. Пневмоэлектрические клапаны 23 и 24 предназначены для изменения направления потоков воздуха и представляют собой трехлинейные двухпозиционныс воздухораспределители. Клапан 23 вьтолнен как нормально закрытый, а клапан 24 нормально открытьй. В клапане 23 сжатый воздух подводится к одному из отверстий и отводится через другое, а третье отверстие не сообщается с атмосферой и заглушено. F3 клапане 24 сжатый воздух подается в одно отверстие, второе отверстие сообщается с атмосферой, а третье - соединено с пневмоцилиндром 12. Работает устройство следующим обра- После наработки паковок 2 бобинодержатель отходит от фрикционного цилиндра 3 до упора и занимает строго фиксированноё положение относительно толкателя 11. Для приема паковок перед бобинодержа- телем 1 устанавливают шпулярник, на который поочередно на каждьш штьфь сталкивают по одной паковке с определенным интервалом во времени. При установке шПулярника он воздействует на конечный выключатель и подает импульс для ввода сжатого воздуха в патрубок 7 пневмокамеры 6. Под действием сжатого воздуха шток 9, воздействуя на приспособление для разжима паковок, освобождает их. При своем перемещении мембрана 8 открывает отверстие воздухопровода 10, и воздух поступает к пневмоэлектрическому клапану 23, который закрыт. При подаче импульса от тумблера (не показан) открывается клапан 23, воздух поступает в рабочую полость пневмопнлинлра IP и перемещает поршень 29 и связанный с ним шток 14. Через зубчато-реечную передачу 15 и шестерню 16 сктещение штока 14 пе- редается зубчатой рейке 17, на которой закреплена ползушка 18с толкателем 11 При своем перемещении толкатель сталкивает одну из паковок 2 на штырь шпулярника. При этом палец 28 на штоке 14 поднимает пластину 22. которая нажимает на ролик датчика 25. Датчик 25 передает импульс на клаПан 23, которьй прерьшает подачу воздуха и движение тол кателя прекращаемся. Для снятия второй паковки штьфь шпулярника перемещается, к бобинодержателю, нажимает на тумблер и подает импульс на клапан 23. Процесс съема второй паковки осуществляется в той же последовательности, после чего палец 28 посредством пластины 22 удерживает датчик 25 в замкнутом положении. При перемещении пальца. 28 по плас тине он находит на ролик датчика 26, которьй подает сигнал клапанам 23 и 24 на прекращение подачи воздуха к пне моцилиндру 12, и воздух из клапана 24 через отверстие 30 вьшодится в атмосферу. При этом пружина 13 возвращает щток. 14 вместе с толкателем 11 в исходное положение. Формула изобретения 1. Устройство для автоматического съема последовательно установленньк на бобинодержателе паковок, содержащее смонтированный С возможностью возвратно-поступательного перемещения вдоль оси паковок толкатель и его привод с силовым органом, связаннъй посредством исполнительного механизма с приспособлением для разжима паковок, отли7S7336чающееся тем, что, с целью упрощения обслуживания за счет осу7цествления последовательного съема паковок, оно содержит средство для позиционного перемещений толкателя, имеющеё консольно установленную пластину и переключатели, связанные с пластиной посредством Датчиков ее положения, при этом пластина и переключатели подсоединены к силрвому органу привода толкателя. 2.Устройство по п.1, о т л и ч а- ю щ е е с я тем, что силовой орган привода представляет собой пневмоцилиндр, щток, которогб подпружинен и посредством зубчато-реечной передачи связан с толкателем. - ,:..л;1. ,,-...; , . 3.Устройство по П.П.1 и 2, отличающееся тем, что исполнительный механизм содержит источник жатого воздуха и диа4рагменную пневмокамеру, подсоединенную воздухопроводом к пневмоцилиндру привода, при этом переключатели представляют собой пневмоэлектричес- . кие клапаны )азмещены вПвШдухЬпрОводе,а датчиквположеййя пластины вь полнены в виде микропереключателей. 4.Устройство по п.п. 1 и 2, отличающееся тем, что шток пневмоцЕлиндра посредством закрепленного на его конце пальца св агзан с пластиной. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 49-11346, кл. 43 Ь 1974. 2.Патент Франции № 2О57687, кл. В 65Н 67/ОО, опублик. 1971 (прототип).
7.
С
V-27
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Бобинодержатель | 1978 |
|
SU787323A2 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
| Устройство для перегрузки паковок с намоточных машин | 1982 |
|
SU1043091A1 |
| Бобинодержатель | 1977 |
|
SU647213A2 |
| Устройство для непрерывной намотки текстильных паковок | 1989 |
|
SU1715702A1 |
| Устройство для непрерывной намотки текстильных паковок | 1990 |
|
SU1784030A3 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Устройство для перегрузки паковок на текстильных машинах | 1987 |
|
SU1447741A1 |
| Устройство для последовательного съема паковок с многоместного паковкодержателя текстильной машины | 1984 |
|
SU1217762A1 |
| Устройство для перегрузки паковок и намоточных машин | 1980 |
|
SU977345A1 |