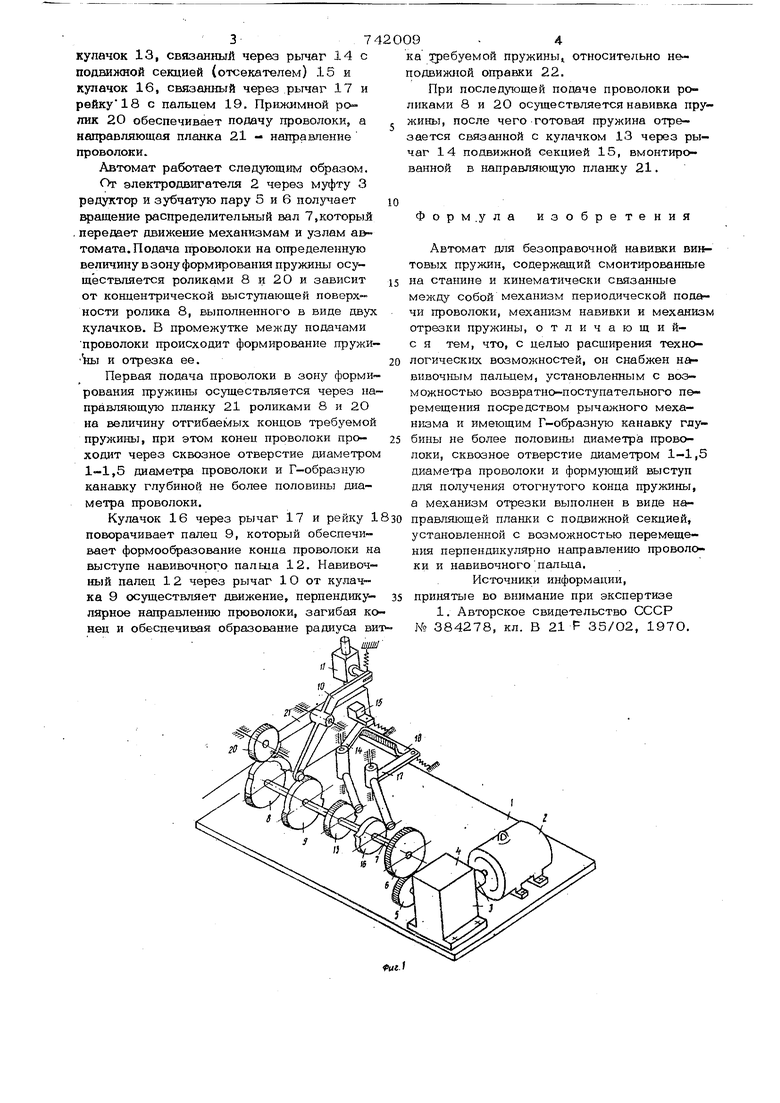
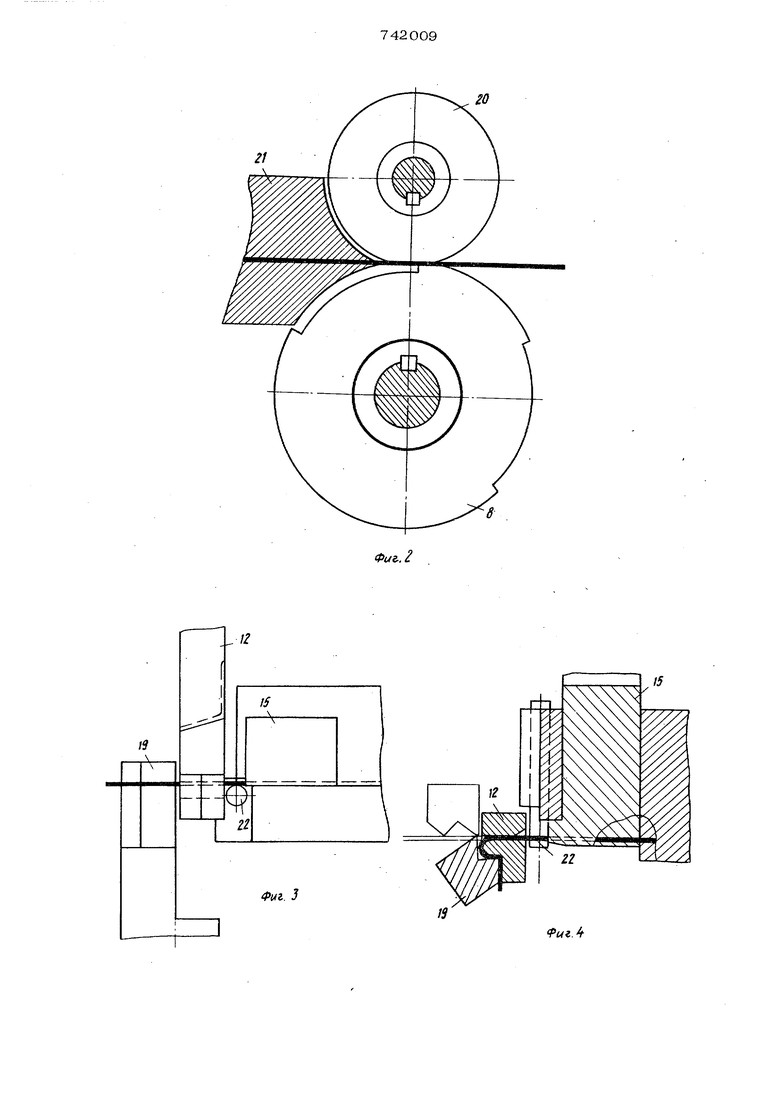
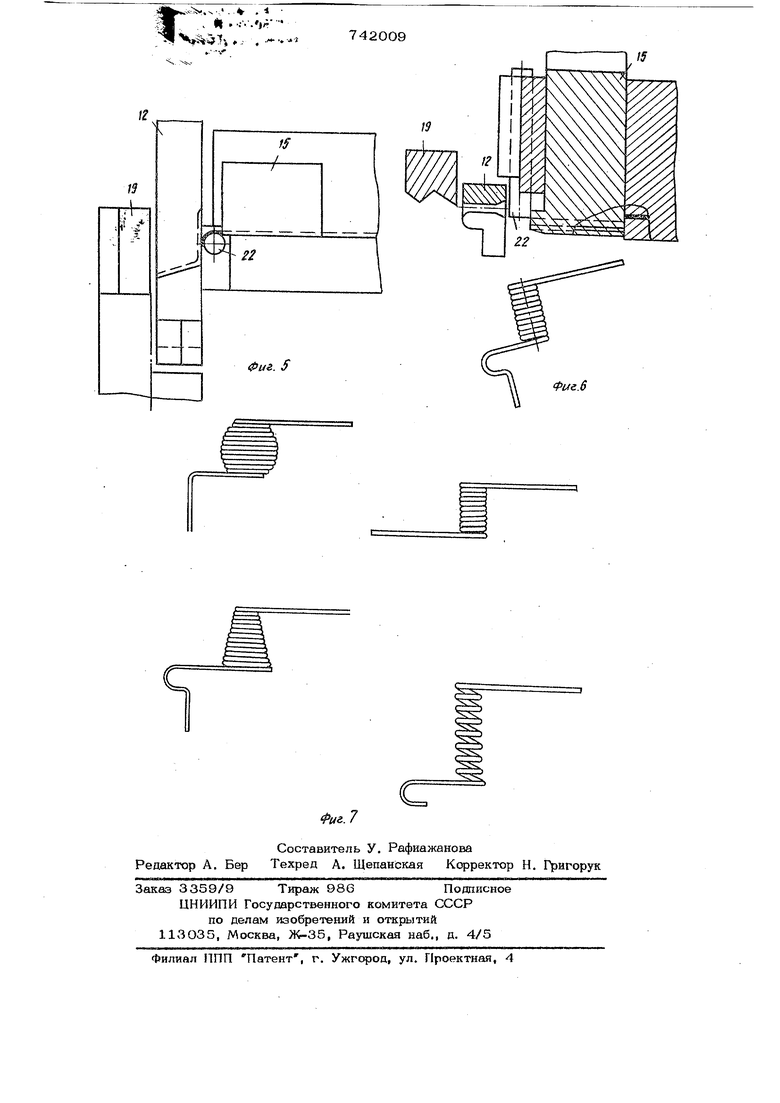
Изобретение касается изготовления пру жин с отогнутыми концами, широко исполь зуемых во всех отраслях промышленности. Известен автомат для навивки винтовых пружин безоправочным способом, содержащий смонтированные на станине и кинематически связанные между собой приводной валковый механизм периодической подачи проволоки, механизм навивки, вьнполнецный в виде формующих пальцев и оп равки, а также механизм отрезки пруж№ны ij . Однако этот автомат не позволяет получать пружины с отогнутыми и фигурными концами. Целью изобретения является расширение технологических возможностей автомата. Это достигается тем, что предложе ный автомат для безоправочной навивкИ пружин снабжен навивочным пальцем, установленньтм с возможностью возвратно-поступатальногч) перемещения посредством ры чажного механизма, имеющим Г-образную канавку глубиной не более половины диа метра проволоки, сквозное отверстие диа метром 1-1,5 диаметра проволоки и формообразующий выступ для получения отогнуто го конца пружины механизм отрезки , полнен в виде направляющей планки с подвижной секцией, установленной с возможностью перемещения перпендикулярно направлению проволоки и навивочного пальца. На фиг. 1 приведена кинематическая схема автомата; на фиг. 2 - механизм подачи проволоки; на фиг. 376 - механизм формирования пружины; на фиг. 7 - типы пружин. Автомат содержит станину 1, электродвигатель 2, который через муфту 3, редуктор 4, зубчатую пару 5 и 6 передает вращение распределительному валу 7, на котором насажены кулачковый ролик 8, обеспечивающий подачу проволоки, кулачок 9, создающий возвратно-поступател ное движение через рычаг 10 ползуну 11, на котором крепится навивочный палец 12 купачок 13, связанный через рычаг 14с подвийшой секцией (отсекателем) 15 и кулачок 16, связанный через рычаг 17 и рейку18 с пальцем 19, Прижимной ролик 20 обеспечивает подачу проволоки, а направляющая планка 21 - направление проволоки. Автомат работает следующим образом. От электродвигателя 2 через муфту 3 редуктор и зубчатую пару 5 и 6 получает ащение распределительный вал 7,который . передает движение механизмам и узлам ai томата. Подача проволоки на определенную величину в зону формирования пружины осуществляется роликами 8 и 20 и зависит от концентрической выступающей поверхности ролика 8, выполненного в виде двух кулачков. В промежутке между подачами проволоки происходит формирование пружи te)i и отрезка ее. Первая подача проволоки в зону форми рования пружины осуществляется через на правляющую планку 21 роликами 8 и 2О на величину отгибаемых концов требуемой пружины, при этом коней проволоки проходит через сквозное отверстие диаметро 1-1,5 диаметра проволоки и Г-образную канавку глубиной не более половины диаметра проволоки. Кулачок 16 через рычаг 17 и рейку 18зо
поворачивает палец 9, который обеспечивает формообразование конца проволоки на выступе навивочного палща 12. Навивоч- ный палец 12 через рычаг 10 от кулачка 9 осуществляет движение, перпендику- 35 лярное направлению проволоки, загибая конец и обеспечивая образование радиуса витустановленной с возможностью перемещеН1Ш перпендикулярно направлению проволоки и навивочногопальца.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 384278, кл. В 21 F 35/О2, 197О. ка требуемой пружины, относительно неподвижной оправки 22. При последующей подаче проволоки роликами 8 и 2О осуществляется навивка пружины, после чего готовая пружина отрезается связанной с кулачком 13 через рычаг 14 подвижной секцией 15, вмонтированной в направляющую планку 21. Форм.ула изобретения Автомат для безоправочной навивки винтовых пружин, содержащий смонтированные на станине и кинематически связанные между собой механизм периодической подачи проволоки, механизм навивки и механизм отрезки пружины, отличающий- с я тем, что, с целыо расширения технологических возможностей, он снабжен навивочным пальцем, установленным с возможностью возвратно-поступательного перемещения посредством рычажного механизма и имеющим Г-образную канавку глубины не более половины диаметра проволоки, сквозное отверстие диаметром 1-1,5 диамефа проволоки и формующий выступ для получения отогнутого конца пружины, а механизм отрезки выполнен в виде направляющей планки с подвижной секцией.
20
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навивки пружин | 1978 |
|
SU745580A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН | 1971 |
|
SU415073A1 |
| Автомат для изготовления двухспиральных пружин с отогнутыми концами | 1985 |
|
SU1294442A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Механизм поворота проволоки к безоправочным пружинонавивным станкам | 1976 |
|
SU621429A1 |
| ОСЬСОЮЗНАЯ mmm-jimriu'im | 1973 |
|
SU384278A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| Автомат для изготовления пружин | 1988 |
|
SU1595612A1 |
ff
4
19
22
Фи1. 3
15
-.х ,... . i
. И ...-. .I/;4 4а 4 - .
/f
//
13
/
-/2
J
Фиг. S
i -L
742009
W
Фи&.б
