(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ Э.Г1ЕКТРОПРИВОДОМ МНОГОРОЛИКОВОГО НАТЯЖНОГО
1
Изобретение относится к электротехнике и может быть использовано в многороликовых натяжных механизмах, служащих для создания натяжения и транснортировки полосы на линиях обработки листовой прокатной продукции в прокатных цехах. Электропривод роликов натяжных механизмов выполняется, как правило, индивидуальным с использованием в качестве приводных двигателей злектродвигателей постоянного тока с независимым возбуждением.
Функционально, в зависимости от места натяжного механизма на участке обработки, этот механизм может создавать и поддерживать натяжение в обрабатываемой полосе или быть ведущим механизмом участка и поддерживать заданный уровень скорости транспортировки обрабатываемой полосы. В любом случае одним из требований к электроприводу натяжного механизма является обеспечение отсутствия проскальзывания полосы по поверхности каждого из роликов механизма. Так как условие отсутствия проскальзывания полосы по ролику (буксования) определяется известным соотношением между натяжениями в сбегающей и МЕХАНИЗМА
набегающей ветвях полосы, то для выполнения указанного требования необходимо поддержание вполне определенного распределения нагрузок между приводными электродвигателями роликов, увеличение загрузки электродвигателей последующих роликов по сравнению с предьщущими по мере нарастания абсолютного значения натяжения в полосе между роликами.
Известно устройство для управления многодвигательным электрюприводом многоролико10вого натяжного механизма 1. Это устройство является наиболее близким по технической сущности и достигаемому результату.
Известное устройство содержит нерегулируемый источник питания, подключенный к обtsмотке возбуждения одного двигателя, регулируемый источник питания, к которому подключена обмотка возбуждения другого двигателя, регулятор тока возбуждения, выход которого связан со входом регулировочного источника
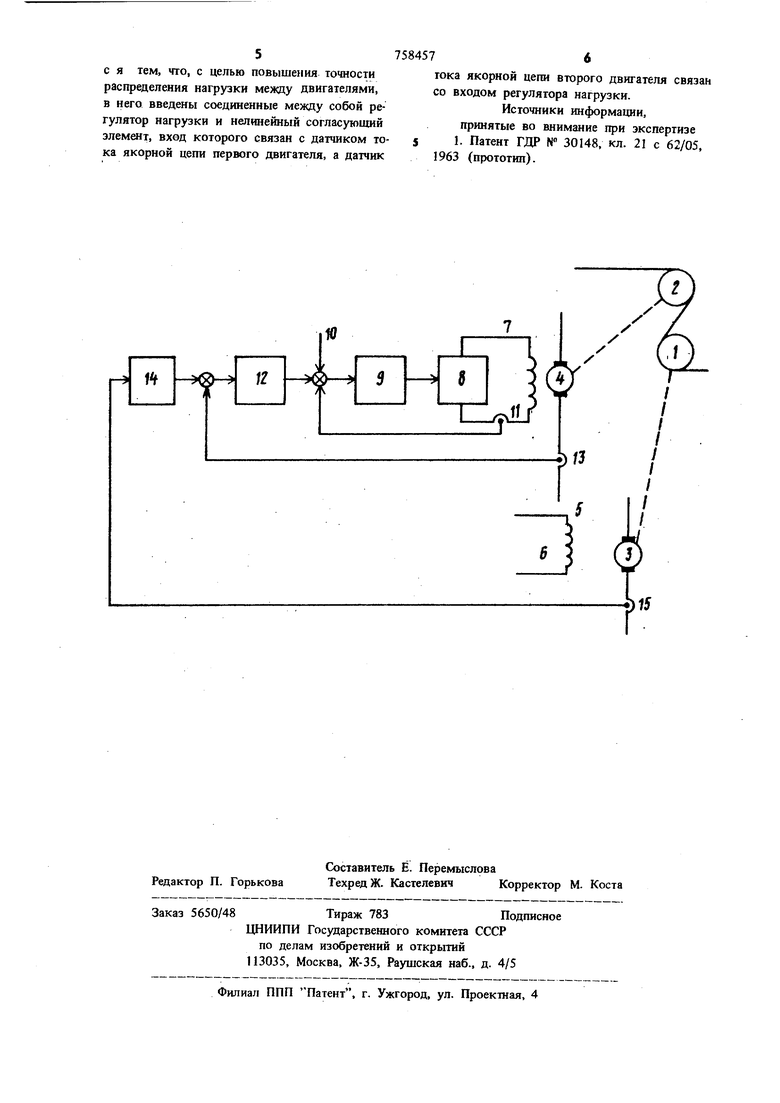
20 питания, выход через узел сравнения с датчиком тока обмотки возбуждения второго двигателя, и датчики тока, включенные в якорные цепи указанных двигателей. - 37 Однако это устройство не в состоянии обеспечить изменение закона распределения нагрузки между двигателями при изменении режима работы привода, необходимого для обеспечения отсутствия буксования роликов натяжного механизма. Целью настоящего изобретения является повышение точности распределения нагрузки меж ду двигателями и тем самым повышение надежности устройства. Указанная цель достигается тем, что в извес ное устрюйство для управления многодвигатель ным электроприводом многовалкового натяжного механизма введены последовательно соединенные между собой регулятор нагрузки и нелинейный согласующий элемент, вход которого связан с датчиком тока якорной цепи первого двигателя, а датчик тока якорной цеп второго двигателя связан со входом регулятора нагрузки.. Суцщость изобретения поясняется чертежом, на котором представлена схема устройства. Ролики 1 и 2 натяжного механизма соединены механически с приводными двигателями 3 и 4. Обмотка 5 возбуждения двигателя 3 соединена с нерегулируемым источником 6 напряжения, а обмотка 7 возбуждения двигателя 4 подключена к регулируемому источнику напряжения, в качестве которого может быть использован злектромашинный или магнитный усилитель, ионный или полупроводниковый преобразователь. Вход 8 источника подключен к выходу регулятора 9 тока возбуждения дви гателя 4. Первый вход регулятора 9 тока воз б ждения соединен с нерегулируемым источни ком 10 напряжения, второй вход регулятора 9 подключен к датчику 11 тока возбуждения двигателя 4, а третий вход регулятора соединен с выходом регулятора 12 нагрузки. Входы регулятора 12 нагрузки соединены с датчиком 13 якорного тока двигателя 4 и с выходом нелинейного согласующего элемента 14, вход которого соединен с датчиком 15 якорного тока двигателя 3. Нелинейный согласующий элемент 14 имеет существенно нелинейную характеристику, изме няющую коэффищ1ент передачи этого элемента (коэффициент согласования) при изменении знака (полярности) сигнала на входе. Такая характеристика описывается следующей системой уравнений: .нэ .нэ у к у ВЫХ-НЭ ЕХ.Ю. выходной сигнал нелиней ного элемента; Х„ „. -- входной сигнал этого элеKI и Kj - коэффициенты передачи, причем К т К. Устройство работает следующим образом. В рабочем режиме транспортировки полосы появление разности натяжений в полосе на входе и на выходе натяжного механизма приводит к появлению токов нагрузки в якорных цепях двигателей 3 и 4. Величины этих токов в соответствии с требуемым соотношением между ними, которое обеспечивает отсутствие проскальзывания полосы по ролику в данном режиме (зтому соотношению соответствуют выбранные при настройке нелинейного элемента вели чины коэффициентов KI и Kj), сравниваются на входе регулятора 12 нагрузки. Если требуемое соотношение токов нагрузки двигателей 3 и 4 не выдерживается, то воздействием регулятора 12 нагрузки на регулятор 9 тока возбуждения двигателя 4 производится подрегулировка его скорости изменением потока возбуждения для восстановления требуемого соотношения якорных токов двигателей 3 и 4. При изменении режима работы с двигательного на генераторный происходит изменение направления тока якоря двигателя 3, и благодаря вышеописанной характеристике нелинейного элемента 14 в этом режиме будет также поддерживаться такое соотношение между токами нагрузки двигателей 3 и 4, которое обеспечит отсутствие буксования. Таким образом, путем автоматического принудительного изменения скорости одного из двигателей натяжного механизма изменением его потока возбуждения обеспечи1вается требуемое но условиям отсутствия буксования соотношение токов нагрузки между двигателями натяжного механизма во всех требуемых технологией режимах работы этого механизма. Формула изобретения Устройство для управления многодвигательным электроприводом многороликового натяжного механизма, содержащее нерегулируемый источник питания, подключенный к обмотке возбуждения одного двигателя, регулируемый источник питания, к которому подключена обмотка возбуждения другого двигателя, регулятор тока возбуждения, выход которого связан со входом регулируемого источника питания, вход через узел сравнения с датчиком тока обмотки возбуждения второго двигателя и датчики тока, включенные в якорные цепи указанных двигателей, отличающеес я тем, что, с целью повышения точности распределения нагрузки между двигателями, в него введены соединенные между собой регулятор нагрузки и нелинейный согласующий элемент, вход которого связан с датчиком тока якорной цепи первого двигателя, а датчик
7584576
тока якорной цепи второго двнгателя связан со входом регулятора нагрузки.
Источники информации, принятые во внимание прн экспертизе 5I. Патент ГДР N 30148, кл. 21 с 62/05,
1963 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1185529A1 |
| Устройство для управления электроприводом натяжного механизма | 1975 |
|
SU560312A1 |
| Многодвигательный электропривод | 1985 |
|
SU1348979A1 |
| Многодвигательный электропривод постоянного тока | 1969 |
|
SU560311A1 |
| Устройство для управления электроприводом натяжного механизма | 1984 |
|
SU1193761A1 |
| Устройство для управления многодвигательным электроприводом тянущей станции | 1977 |
|
SU743151A1 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный электропривод поточной линии | 1977 |
|
SU858196A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
