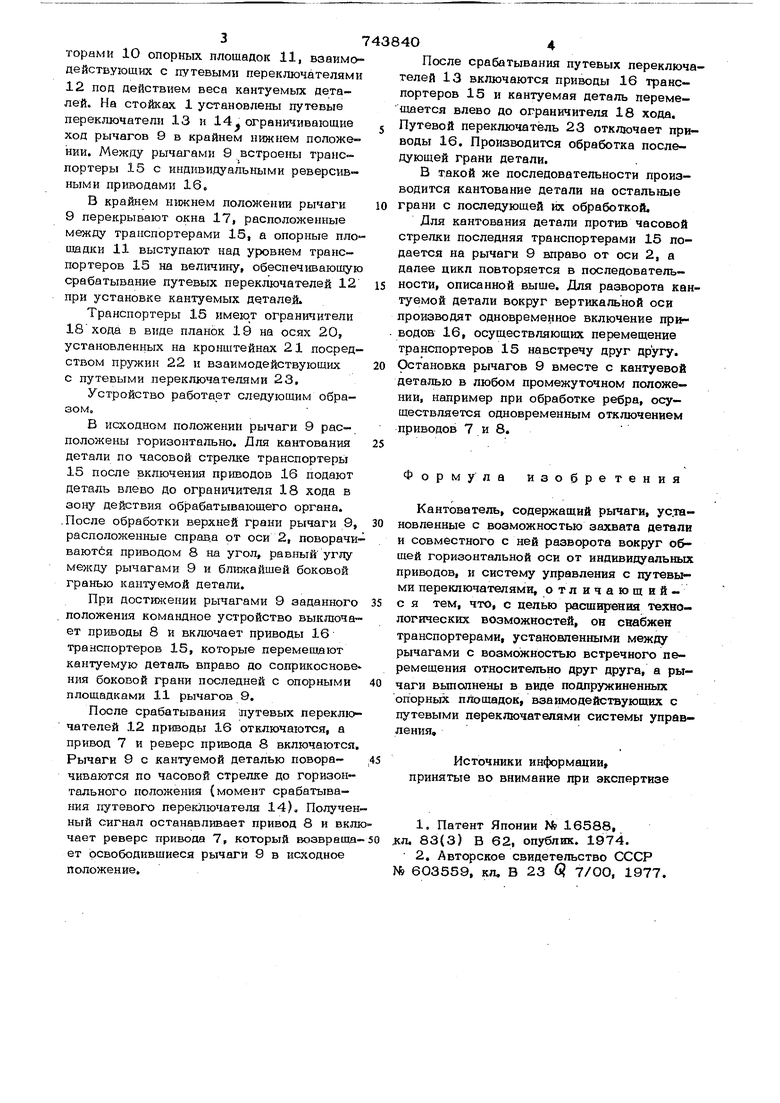
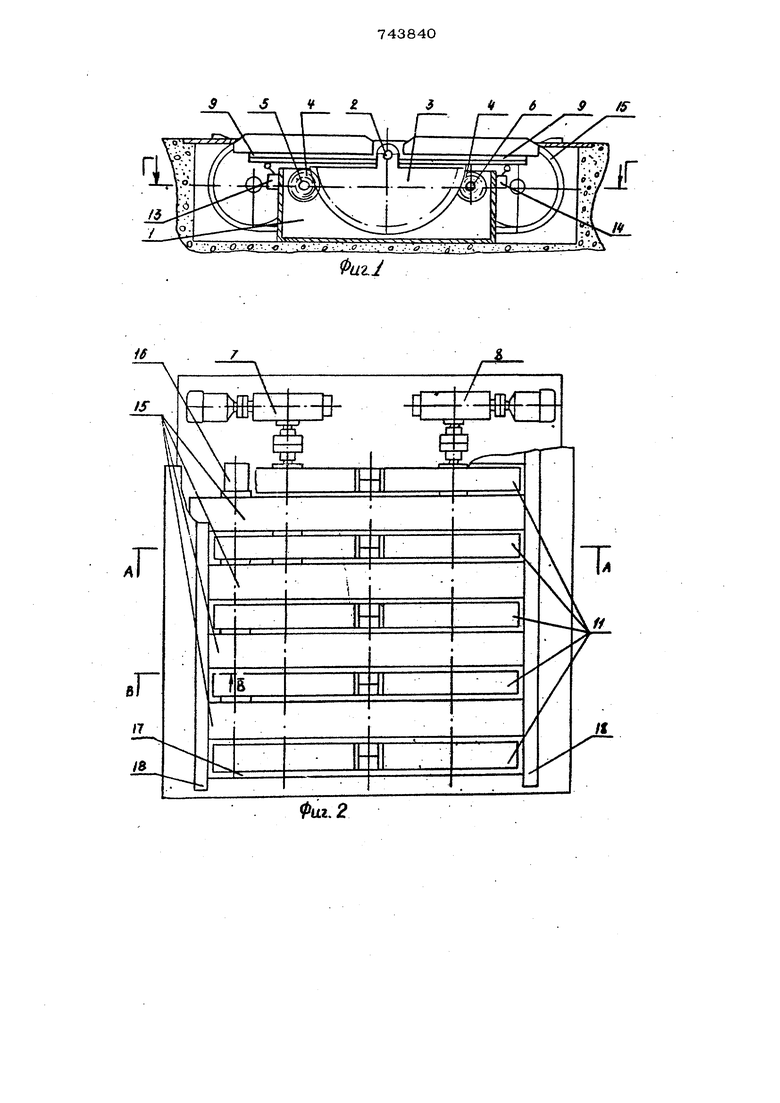
Изобретение относится к машиностроению и может быть использовано цпя кантования деталей различной формы в процессе обработки. Известны кантователИ| содержащие рычаги с горизонтйльной осью вращения, установочные платформы с окнами для нрохода рычагов и привод с зубчатой передачей р.. Известно также устройство для переда чи и кантования деталей содержащее рыч rvt установленные с возможностью захвата детали и совместного с ней разворота вокруг общей горизонтальной оси от инди видуальных приводов, и систему управления E2L Недостатками указанных устройств являются ограниченные ВОЗМОЖНОСТИ применения при кантовании деталей различной формы и с различным расположением цент ра тяжести относительно геометрической .оси симметрии. Цель изобретения - расширение технологических возможностей кантователей. Указанная цель достигается тем, что устройство снабжается транспортерами, установленными между рычагами. с возможностью встречного перемещения относи- тельно друг друга, а рычаги выполнены В виде подпружиненных опорных площайок, взаимодействующих с путевыми переключателями системы управления. На фиг. 1 изображено устройство общий ВИД на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. 1. Кантователь содержит 1, на горизонтальной оси 2 :которых установлены зубчатые секторы 3 одинакового диаметра ,: ВОЗМОЖНОСТЬЮ поворота относительно друг друга посредством зубчатых колес 4, установленных на осях 5, 6 и индивидуальных реверсивных приводах 7, 8. На зубчатых секторах 3 закреплены рыдаги 9 В ввде йодпружинен1а1Х амортнэл- торами 10 опорных площадок 11, взаимодействуюшм с путевыми переключателями 12 под действием веса кантуемых деталей. На стойках 1 установлены путевые переключатели 13 и 14 . ограничивающие ход рычагов 9 в крайнем нижнем положении, Меж/ду рычагами 9 встроены транспортеры 15 с индивидуальными реверсивными приводами 16. В крайнем нижнем положении рычаги 9 перекрывают окна 17, расположенные между транспортерами 15, а опорные пло шадки 11 выступают над уровнем транспортеров 15 на величину, обеспечивающую срабатывание путевых переключателей 12 при установке кантуемых деталей. Транспортеры 15 имеют ограничители 18хода в виде планок 19 на осях 20, установленных на кронштейнах 21 посредством пружин 22 и взаимодействующих с путевыми переключателями 23, Устройство работает следующим образом. В исходном положении рычаги 9 рас положены горизонтально. Для кантования детали по часовой стрелке транспортеры 15 после включения приводов 16 подают деталь влево до ограничителя 18 хода в зону действия обрабатывающего органа. , После обработки верхней грани рычаги 9, расположенные справ.а от оси 2, поворачи ваются приводом 8 на угол, равный углу между рычагами 9 и бли сайшей боковой гранью кантуемой детали. При достижении рычагами 9 заданного положения командное устройство выключает приводы 8 и включает приводы 16 транспортеров 15, которые перемещают кантуемую деталь вправо до соприкоснове ния боковой грани последней с опорными площадками 11 рычагов 9. После срабатывания путевых переклю чатеяей 12 приводы 16 отключаются, а привод 7 и реверс привода 8 включаются Рычаги 9 с кантуемой деталью поворачиваются по часовой стрелке до горизон тального положения (момент срабатывания путевого переключателя 14), Получен ный сигнал останавливает привод 8 и вкл чает реверс привода 7, который возвраща ет рсвободивщиеся рычаги 9 в исходное положение. После срабатывания путевых переключателей 13 включаются приводы 16 транспортеров 15 и кантуемая деталь перемецается влево до ограничителя 18 хода. Путевой переключатель 23 отключает приводы 16. Производится обработка последующей грани детали, В такой же последовательности производится кантование детали на остальные грани с последующей их обработкой. Для кантования детали против часовой стрелки последняя транспортерами 15 подается на рычаги 9 вправо от оси 2, а далее цикл повторяется в последовательности, описанной выше. Для разворота кантуемой детали вокруг вертикальной оси производят одновременное включение приводов 16, осуществляющих перемещение транспортеров 15 навстречу друг другу. Остановка рычагов 9 вместе с кантуевой деталью в любом промежуточном положении, например при обработке ребра, осуществляется одновременным отключением приводов 7 и 8. Формула изобретения Кантователь, содержащий рычаги, ус.тановленные с возможностью захвата детали и совместного с ней разворота вокруг общей горизонтальной оси от индивидуальных приводов, и систему управления с путевыми переключателями, отличающий с я тем, что, с цепью расширения технологических возможностей, он снабжен транспортерами, установленными между рычагами с возможностью встречного перемещения относительно друг друга, а рычаги выполнены в виде подпружиненных опорных площадок, взаимодействующих с путевыми переключателями системы управления. Источники информации принятые во внимание при экспертизе 1. Патент Японии № 16588, ,кл. 83(3) В 62, опублик. 1974. 2. Авторское свидетельство СССР № 603559, кл, В 23 5 7/ОО, 1977. 1 69 /f
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь | 1978 |
|
SU774910A1 |
| Кантователь | 1978 |
|
SU878488A2 |
| КАНТОВАТЕЛЬ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК (ОТВС) | 2021 |
|
RU2768977C1 |
| Кантователь для штучных изделий | 1986 |
|
SU1377229A1 |
| Кантователь | 1973 |
|
SU562474A1 |
| КАНТОВАТЕЛЬ | 1998 |
|
RU2129087C1 |
| Устройство для передачи деталей с одновременным их кантованием | 1974 |
|
SU512026A1 |
| Кантователь деталей | 1982 |
|
SU1079401A1 |
| КАНТОВАТЕЛЬ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2107651C1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |

. Фиг,3
в-в
го
г/
s
Фиг.
Фиг.5
