(54) СТОЛ КОПИРОВАЛЬНЫЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для шлифования лопаток | 1978 |
|
SU713086A1 |
| Устройство для закалки криволинейных поверхностей | 1976 |
|
SU945205A1 |
| Полуавтоматический электрокопировальный фрезерный станок для обработки фасонных контуров больших размеров, в частности самолетных шаблонов | 1948 |
|
SU86730A1 |
| КОПИРОВАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК | 1970 |
|
SU262365A1 |
| Привод вращения устройства для шлифования восстановленных кулачков распределительного вала | 1984 |
|
SU1230802A1 |
| Копировальное устройство | 1983 |
|
SU1121125A1 |
| ГИДРАВЛИЧЕСКАЯ КОПИРОВАЛЬНАЯ СИСТЕМА | 1968 |
|
SU217839A1 |
| Электромеханическое копировальное устройство для автоматического копирования замкнутых контуров | 1955 |
|
SU112407A1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| Двухкоординатное гидравлическое устройство к копировально-фрезерным станкам | 1960 |
|
SU139539A1 |

1
Изобретение относится к области станкостроения и может быть использовано во фрезерных станках.
Известны копировальные столы с устройствами для регулирования скорости подачи в режиме контурного фрезерования 1. В них регулирование скорости результирующей подачи осуществляется в зависимости от изменения крутизны контура копира,а копируемый профиль образуется за счет сложения -двух прямолинейных движений.
Недостатком прототипа является отсутствие регулирования результирующей подачи от заданной скорости обхода, что снижает точность обработки.
Целью изобретения является обеспечение регулирования скорости результирующей подачи в зависимости от скорости обхода контура.
С этой целью копировальный стол выполнен в виде взаимодействующего с копиром ролика и кинематически связанного споследним датчика задающей скорости, включающего генератор опорной частоты.
Датчик задающей скорости выполнен в виде плунжерного золотника, а привод стола выполнен гидравлическим. Генератор
опорной частоты выполнен в виде гидродвигателя с дросселем и подключен параллельно плунжеру золотника.
Кроме того, кинематическая связь ролика с датчиком Может быть выполнена в виде сельсина-датчика и сельсина-приемника. Генератор опорной частоты выполнен в виде электродвигателя с редуктором, а датчик задающей скорости снабжен вариатором, подсоединенным последовательно в кинематической цепи между двигателем и роли10ком.
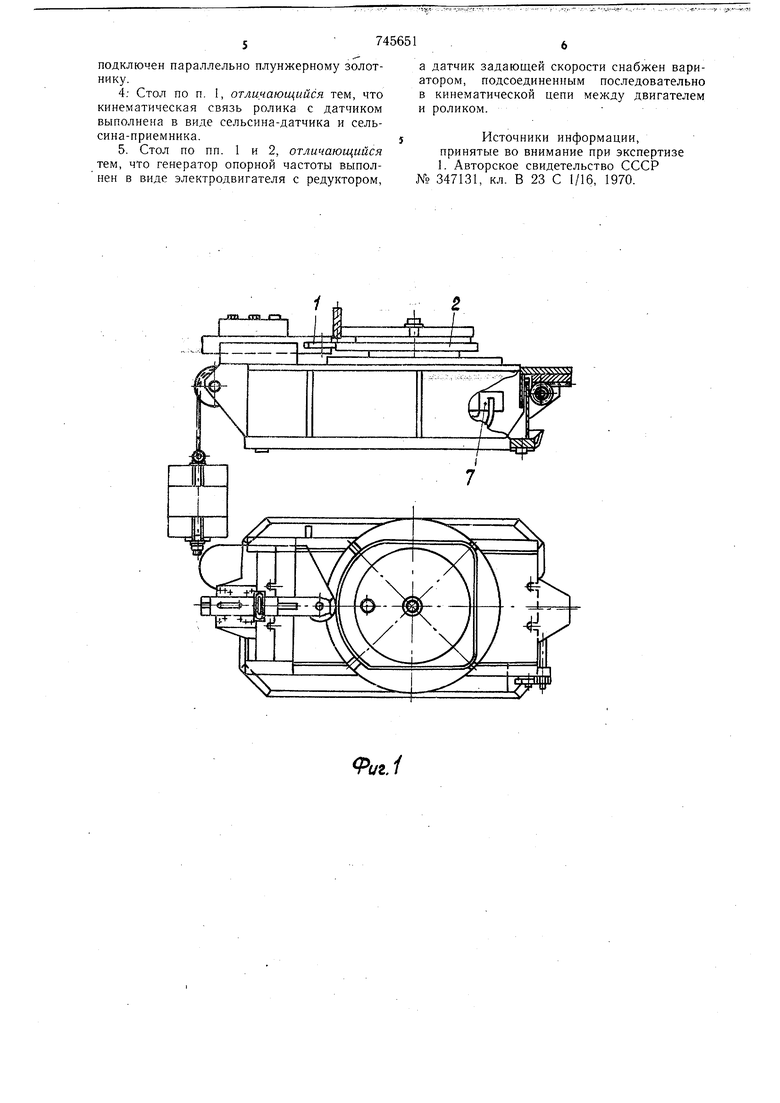
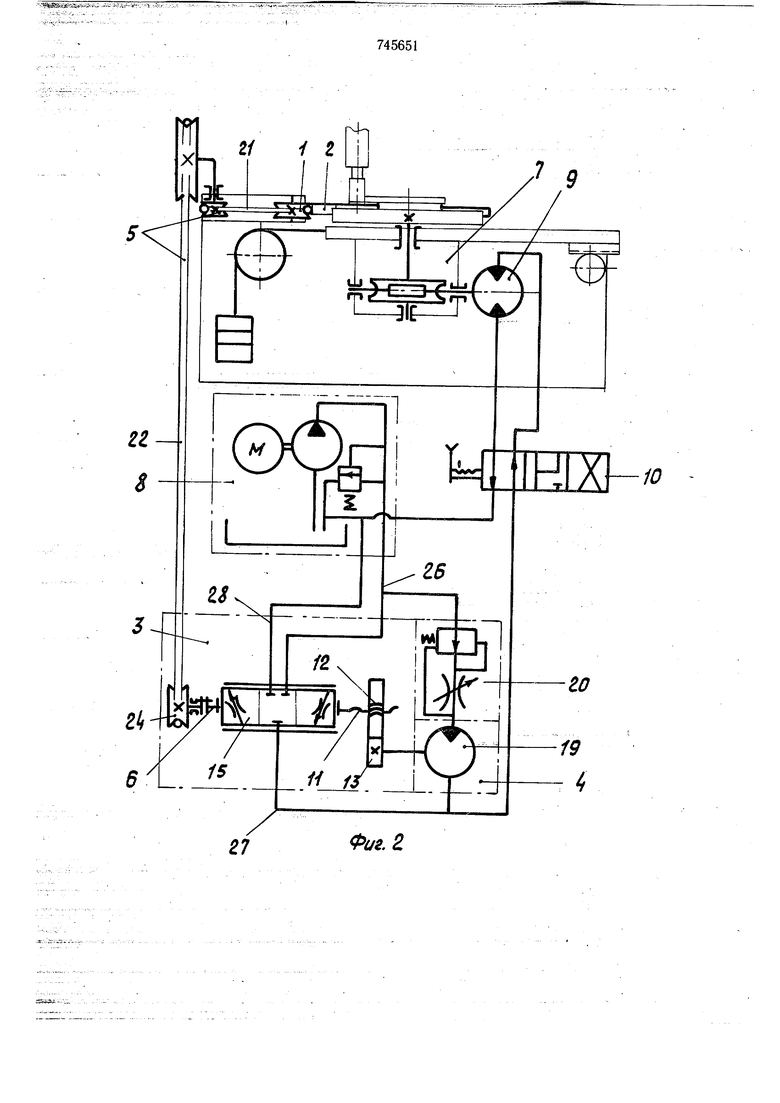
На фиг. 1 - общий вид стола; на фиг. 2 то же, принципиальная схема; на фиг. 3 - датчик задающей скорости,в разрезе.
Стол копировальный содержит ролик 1,
15 взаимодействующий с копиром 2, датчик задающей скорости 3, включающий генератор опорной частоты 4, кинематическую связь 5, соединяющую ролик I с валом 6 датчика задающей скорости 3, и привод 20 стола 7, сообщающий движение копиру 2.
Привод стола 7 выполнен гидравлическим, состоящим из насосной установки 8 и гидродвигателя 9, включаемого реверсивным золотником 10.
Вал 6 имеет винтовую нарузку 11, взаимодействующую с гайкой 12. Гайка 12 посредством передачи 13 соединена с енератором опорнойчастоты 4.
В корпусе 14 датчика задающей скорости 3 расположен золотник 15, состоящий из гильзы 16 и плунжера 17, через отверстие которого свободно проходит вал 6.
Плунжер 17 удерживается на валу 6 от осевого смещения подщипником 18. Генератор опорной частоты 4 выполнен в виде подключенного параллельно золотнику 15 гидродвигателя 19 с дросселем 20. Может быть выполнен также и в виде электродвигателя с редуктором, при этом необходимая чистота устанав.тивается вариатором, подсоединенным последовательно в кинематической цепи между двигателем и роликом. Кинематическая связь 5 выполнена в виде ременных передач 21 и 22, но может быть вынолненеа в виде сельсинной передачи, в которой сельсин-датчик получает движение от ролика 1, а сельсин-приемник передает движение валу 6. Вал 6 выполнен составным7 часть 23 которого несущая приводной шкив 24, не имеет осевого перемещения, а вторая часть 25, несущая плунжер 17, имеет возможность осевого перемещения.
Стол работает следующим образом.
Генератором опорной частоты 4 устанавливается скорость обхода контура, равная оптимальной скорости результирующей подачи, и реверсивным золотником 10 включается привод вращения копира 2. При этом масло поступает от насосной установки 8 по линии 26 через золотник 15 и генератор опорной частоты 4 к реверсивному золотнику 10 и гидродвигателю 9. Гидродвигатели 9 и 19 начинают вращаться. От гидродвигателя 9 движение передается копиру 2, ролику 1 и по кинематической связи 5 валу 6, имеющему винтовую нарезку 11. Таким образом, вал 6 врап1ается в частотой пропорциональной скорости результирующей- подачи. От гидродвигателя 19 движение передается гайке 12, поэтому Последняя враП1ается с частотой, пропорциональной установленной скорости обхода контура.
Направление вращения вала 6 и гайки 12 должно совпадать, что достигается переключением реверсивного золотника 10.
При совпадении частот вращения вала 6 и гайки 12 последние будут вращаться как одно целое и осевого перемещения вала 6 не будет. Это соответствует случаю, когда скорость результируюпдей подачи соответствует установленной скорости обхода контура. При несовпадении частот винтовая нарезка 11 вала 6 будет перемещать вал 6 в осевом- направлении, т. е. он будет ввинчи.ваться или вывинчиваться из гайки 12. Осевое перемещение вала 6 передается плунжеру 17, осуществляющему регулирование задающей скорости подачи. Если частота вращения вала 6 будет меньше частоты
гайки 12, то плунжер 17 начнет перемещаться вверх (фиг. 3), вследствие чего канал линии 26 начнет сообщаться с каналом линии 27 и масло начнет поступать к гидродвигателю 9 в большем количестве, что приведет к повышению частоты вращения гидродвигателя 9, т. е. задающей скорости; а следовательно, и вала 6. Перемещение плунжера 17 прекратится тогда, когда частота вращения вала 6 совпадает с частотой вращения гайки 12, т. е. тогда, когда ролик 1 достигнет частоты вращения, соответствующей установленной скорости обхода контура. Если частота вращения вала 6 начнет превыщать частоту гайки 12, то осевое перемещение вала 6 будет направлено в обратном направлении, что приведет к уменьшению подачи масла и понижению задающей скорости, т. е. к поддерживанию результирующей подачи в соответствии с заданной скоростью обхода контура. Если же потребуется уменьщить частоту вращения гидродвигателя 9 настолько, что объе.м масла, проходящий через двигатель 19, будет велик, это может случиться при обработке копиров, имеющих резкие переходы с одних радиусов на другие, в этом случае плунжер будет перемещаться вниз до тех пор, пока канал линии 27 не начнет сообщаться с каналом линии 28, т. е. со сливом, вследствие чего масло, прошедшее гидродвигатель 19, частично направится к гидродвигателю 9 для поддержания необходимой частоты вращения ролика 1, а излишняя направится на слив.
/
Таким образом, изменением задающей скорости осуществляется регулирование скорости результирующей подачи в зав,исимости от установленной скорости обхода контура., .
Формула изобретения
включающего генератор опорной частоты, при этом ролик кинематически связан с датчиком.
подключен параллельно плунжерному золотнику.
4; Стол по п. 1, отличающийся тем, что кинематическая связь ролика с датчиком выполнена в виде сельсина-датчика и сельсина-приемника.
а датчик задающей скорости снабжен вариатором, подсоединенным последовательно в кинематической цепи между двигателем и роликом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 347131, кл. В 23 С 1/16, 1970.
(/г./
27
Фиг. 2,
