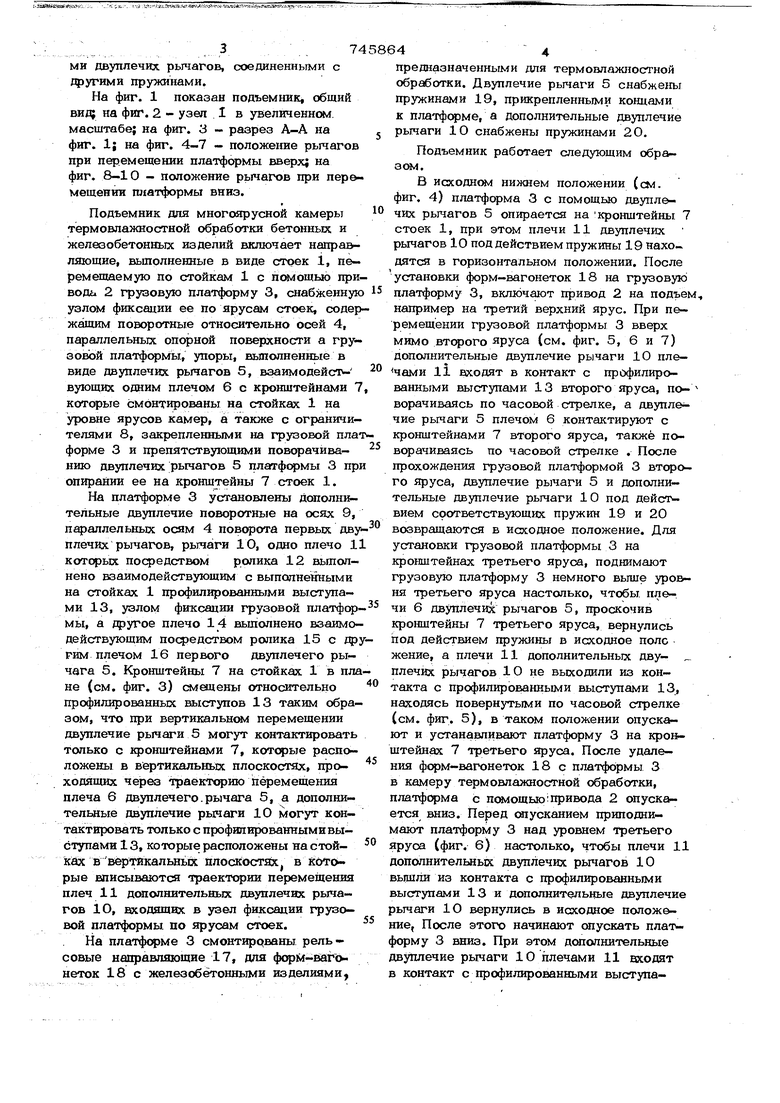
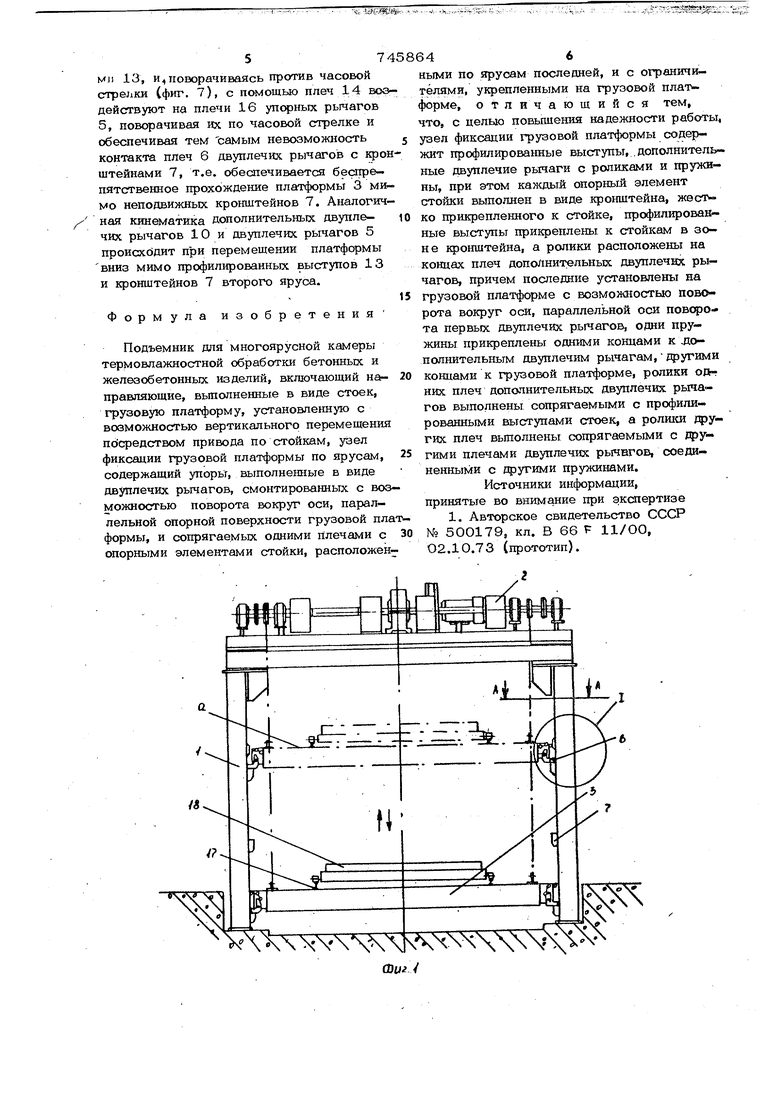
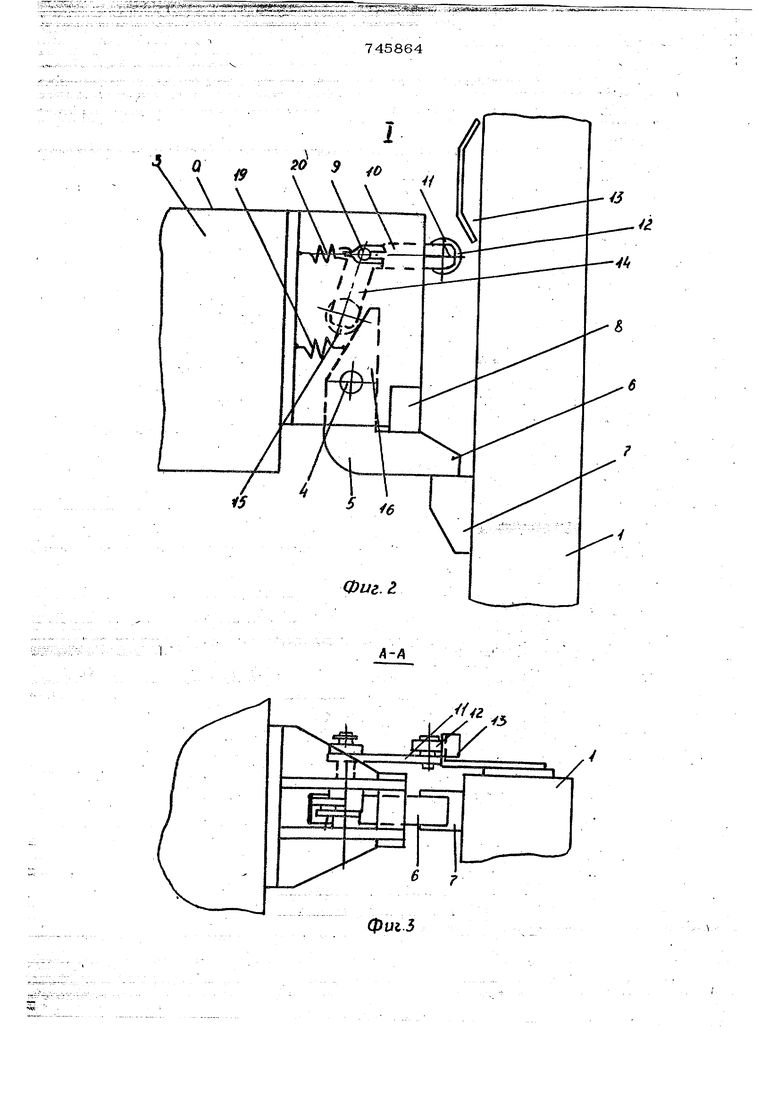
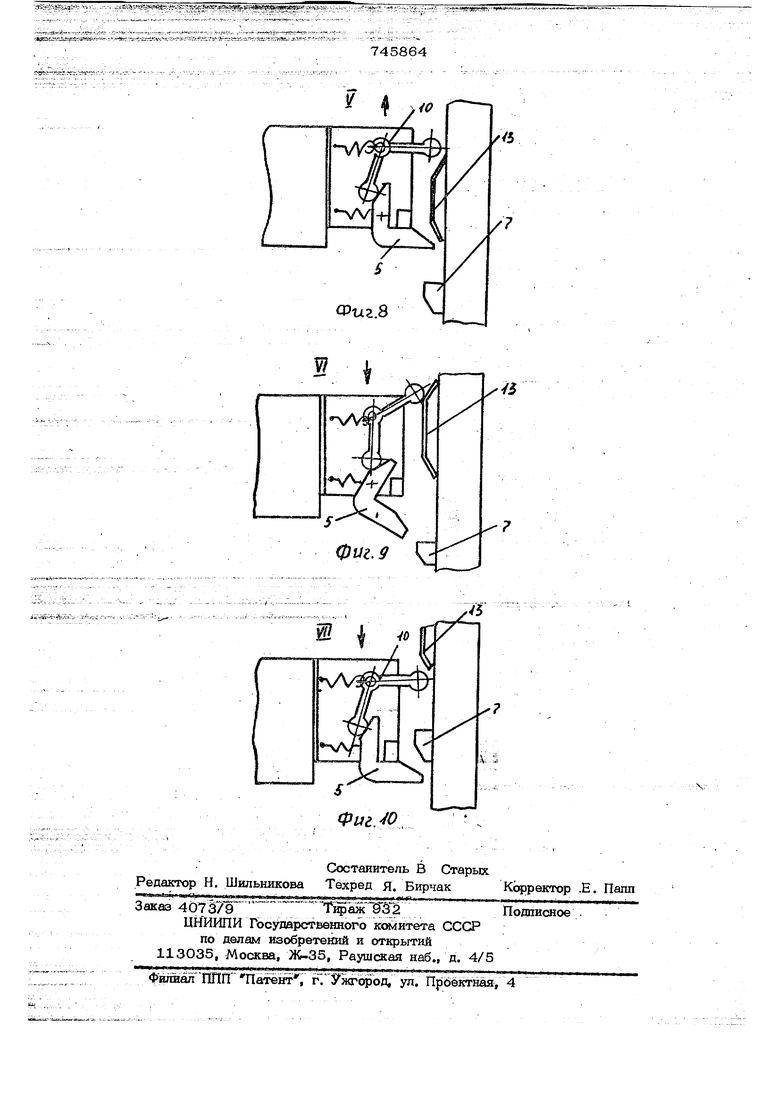
ми двуплечих рычагов, соединенными с другими пружинами. На фиг. 1 показан подъемник, общий вид; на фиг. 2 - узел I в увеличенном масштабе; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4-7 - положение рычагов при перемещении платформы вверх; на фиг. 8-10 - положение рьтагов при пер©мещенин платформы вниз. Подъемник для многоярусной камеры термовлажностной обработки бетонных и железобетонных изделий включает направляющие, вьшолненные в виде стоек 1, перемещаемую по стойкам 1 с пемующью приводд. 2 грузовую платформу 3, снабженную узлом фиксации ее по ярусам стоек, содер жащим поворотные относительно осей 4, параллельных опорной поверхности а грузовой платформы, упоры, вьтолненньге в виде двуплечих рычагов 5, взаимодействующих одним плечом 6 с кронштейнами 7 которые смонтированы на стойках 1 на уровне ярусов камер, а также с ограничителями 8, закрепленными на грузовой пла форме 3 и препятствующими поворачиванию двуплечих рычагов 5 платформы 3 пр опирании ее на кронштейны 7 стоек 1. На платформе 3 установлены дополнительные двуплечие поворотные на осях 9, параллельных осям 4 поворота первых дву плечих рычагов, рычаги 10, одно плечо 1 котфьк пoq eдcтвoм ролика 12 выполнено взаимодействующим с выполненными на стойках 1 профилированными выступами 13, узлом фиксации грузовой платфор мы, а другое плечо 14 выполнено взаимодействующим посредством ролика 15 с др гим плечом 16 первого двуплечего рычага 5. Кронштейны 7 на стойках 1 в пла не (см. фиг. 3) смещены относительно профилированных выступов 13 таким образом, что при вертикальном перемещении двуплечие рычаги 5 могут контактировать только с кронштейнами 7, которые расположены в вертикальных плоскостях, проходящих через траекторию п ёремещения плеча 6 двуплечего.рычага 5, а дополнительные двуплечие рычаги 10 могут контактировать только с профилированными выступами 13, которые расположены на стойках ввертикал ьньйс плоскостях в которые вписываются траектории перемещения плеч 11 дополнительных двуплечих рычагов 10, входящвх в узел фиксации грузовой платформы, по ярусам стоек. На платформе 3 смонтированы рельсовые направлаюшие 17, для форм-вагонеток 18 о железобетонными изделиями, предназначенными для термовлажностной обработки. Двуплечие рычаги 5 снабжены хфужинами 19, прикрепленными конца ш к платфсфме, а дополнительные двуплечие рычаги Ю снабжены пружинами 20. Подъемник работает следующим образом. В исходнеми нижнем положении (см. фиг. 4) платформа 3 с помощью двуплечих рычагов 5 опирается на кронштейны 7 стоек 1, при этом плечи 11 двуплечих рычагов 10 под действием пружины 19 находятся в горизонтальном положении. После установки форм-вагонеток 18 на грузовую платформу 3, включают привод 2 на подъем. например на третий верхний ярус. При перемещении грузовой платформы 3 вверх мимо BTqporo яруса (см. фиг. 5, 6 и 7) дополнительные двуплечие рычаги 10 li вдодят в контакт с профилированными выступами 13 второго яруса, поворачиваясь по часовой стрелке, а двупле чие рычаги 5 плечом 6 контактируют с кронштейнами 7 второго яруса, также поворачиваясь по часовой стрелке . После прохождения грузовой платформой 3 второго яруса, двуплечие рычаги 5 и дополнительные двуплечие рычаги 10 под действием соответствующих пружин 19 и 20 возвращаются в исходное положение. Для установки грузовой платформы 3 на кронштейнах третьего яруса, поднимают грузовую платформу 3 немного выше уровня третьего яруса настолько, чтобы, плечи 6 двуплечих рычагов 5, проскочив кронштейны 7 третьего яруса, вернулись под действием пружины в исходное поле жение, а плечи 11 дополнительных дву- плечих рычагов 10 не выходили из контакта с профилированными выступами 13, находясь повернутыми по часовой стрелке (см. фиг. 5), в таком положении опускают и устанавливают платформу 3 на кровштейнах 7 третьего яруса. После удаления фс м-вагонеток 18с платформы 3 в камеру термовлажностной обработки, платформа с петнощью: привода 2 опускается вниз. Перед опусканием приподнимают платформу 3 над уровнем Третьего яруса (фиг. 6) настолько, чтобы плечи 11 дополнительных двуплечих рычагов 10 вышли из контакта с профилированными выступами 13 и дополнительные двуплечие рычаги 10 вернулись в исходное положение, После этого начинают опускать пла- форму 3 вниз. При этом дополнительные двуплечие рычаги 10 плечами 11 входят в контакт с профилированными выступамл 13, и,поворачиваясь против часовой crpejiKH (фиг, 7), с помощью плеч 14 во действуют на плечи 16 упорных рычагов 5, поворачивая их по часовой стрелке и обеспечивая тем самым невозможность контакта плеч 6 двуплечих рычагов с кро штейнами 7, т.е. обеспечивается бес1тре-. пятственное прохождение платформы 3 ми мо неподвижных кронштейнов 7. Аналогич ная кинематика дополнительных двуплечих рычагов 10 и двуплечих рычагов 5 происходит при перемещении платформы вниз мимо профилированных выступов 13 и кронштейнов 7 второго яруса. Формула изобретения Подъемник для многоярусной камеры термовлажностной обработки бетонных и железобетонных изделий, включающий н правляющие, вьшолненные в виде стоек, грузовую платформу, установленную с возможностью вертикального перемещения посредством привода по стойкам, узел фиксации грузовой платформы по ярусам, содержащий упоры, выполненные в виде двуплечих рычагов, смонтированных с воз можностью поворота вокруг оси, параллельной опорной поверхности грузовой пла формы, и сопрягаемых одними плечами с опорными элементами стойки, расположен
745864 ными по ярусам последней, и с ограничителями, укрепленными на грузовой плат форме, отличающийся тем, что, с целью повышения надежности работы, узел фиксации грузовой платформы содержит профилирова1щые выступы, . дополнительные двуплечие рычаги с роликами и пружины, при этом каждый опорный элемент стойки выполнен в виде кро1Ш1тейна, жест ко прикрепленного к стойке, профилированные выступы прикреплены, к стойкам в зоне кронштейна, а ролики расположены на концах плеч дополнительных двуплечих рычагов, причем последние установлены на грузовой платформе с возможностью поворота вокруг оси, параллельной оси поворо та первых двуплечих рычагов, одни пружины прикреплены одними концами к .дополнительным двуплечим рычагам, другими концами к грузовой платформе, ролики од- них плеч дополнительных двуплечих рычагов выполнены сопрягаемыми с профилированными выступами стоек, а ролшш других плеч выполнены сопрягаемыми с другими плечами двуплечих рычвговц соединенными с гфугими пружинами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 500179, кл. В 66 Р 11/00, О2.10.73 (прототип).
745864
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Подъемник-снижатель | 1979 |
|
SU850388A1 |
| Подающее устройство | 1986 |
|
SU1391860A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2003 |
|
RU2247815C1 |
| Подъемник для автомобилей | 1980 |
|
SU933633A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Устройство для обмена вагонеток в многоэтажной клети | 1980 |
|
SU897689A1 |
| Разгрузчик сушильных вагонеток | 1990 |
|
SU1805046A1 |
| Подъемник | 2024 |
|
RU2832360C1 |
///г
фогЗ
X
XV3
/
