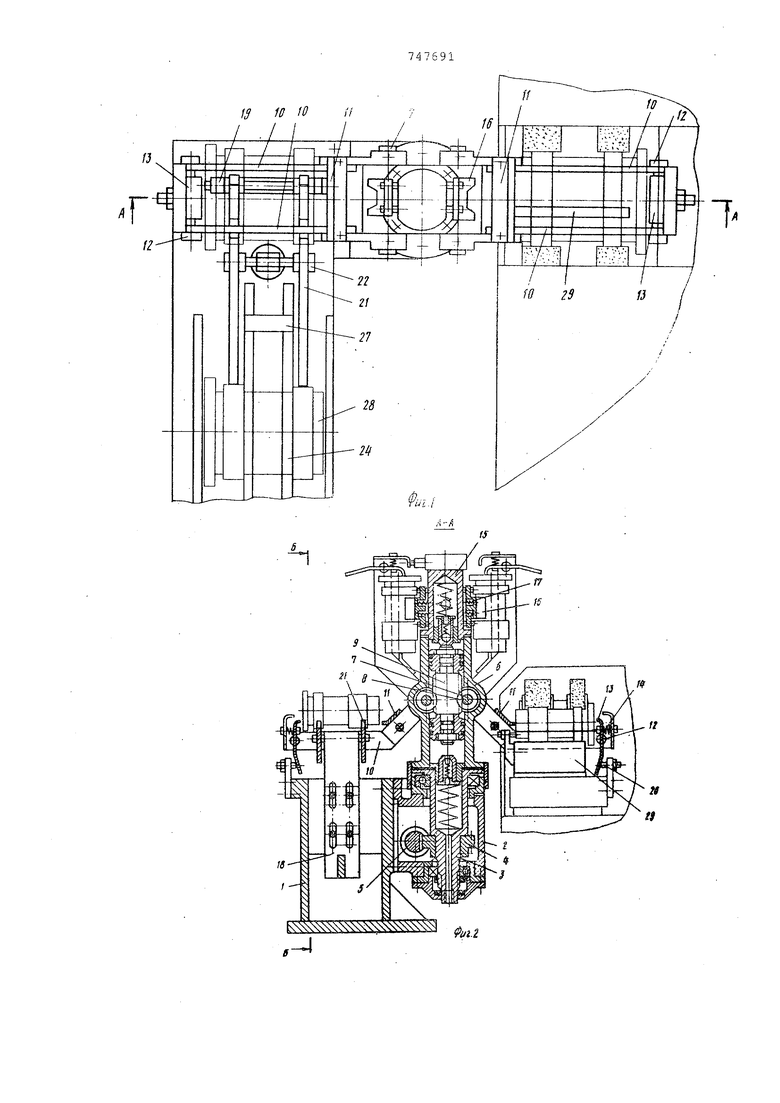
с помощью оси 19 отсекатель 20, состоящий из двух планок 21, стянутых стяжкой 22 и имеющих паз в и выступ Т, привод 23 перемещения отсекателя И два лотка: один- подающий 24, а другой - отводящий 25.
На основании, и на суппорте станка (см. фиг. 2) установлены неподвижные упоры 26, а на подводящем лотке - неподвижный упор 27.
Устройство работает следующим образом.
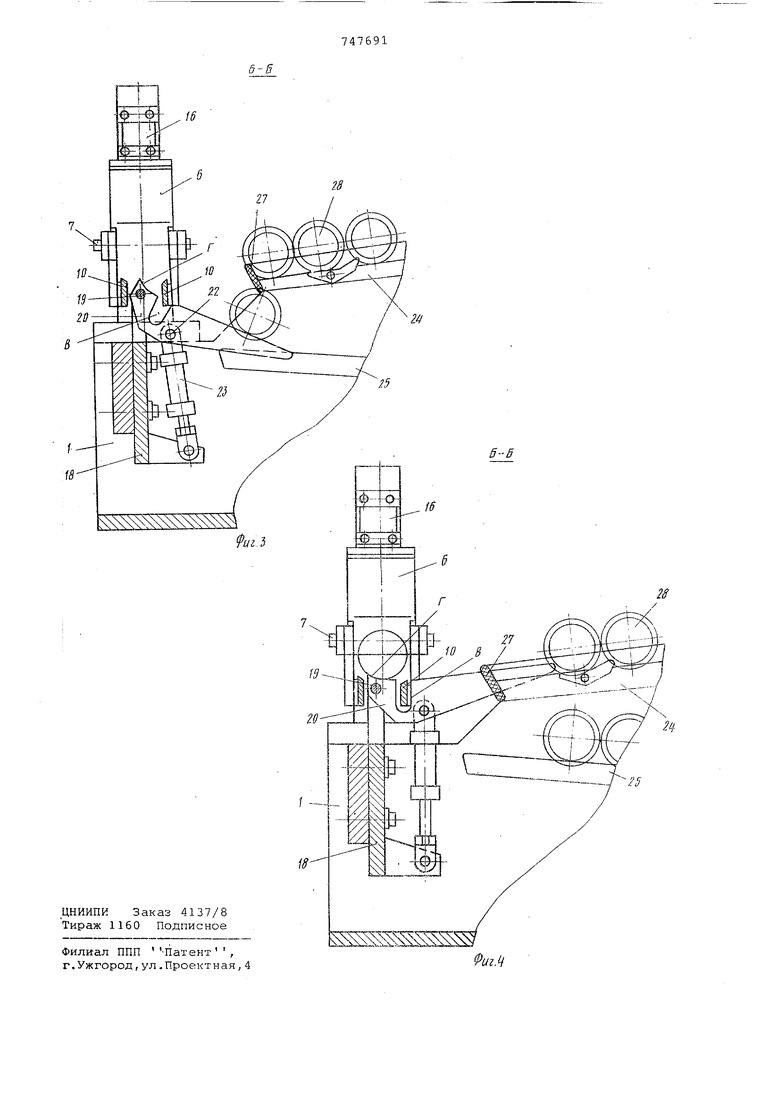
При включении устройства в рс1боту отсекатель 20 поворачивается против часовой стрелки, приподнимает одну заготовку 28, которая перекатывается через упор 27 в зону пластин 10 поворотных рычагов до выступа Г отсекателя 20,-отсекая при этом своей хвостовой частью лежащие на подводящем лотке остальные заготовки.
Затем рычаги, находящиеся один в зоне обработки, а другой на позиции загрузки, начинают подниматься навстречу друг другу вследствие перемещения поршня рейки 9 и вращения шестерен 8. Лежащая на отсекателе ддеталь размещается в пространстве между двух пластин 10 поворотного рычага и после освобождения фиксаторов 13 от упоров 26 зажимается по торцам между упором 11 и фиксатором 13. В крайнем верхнем положении деталь поджимается к башмакам 16. После завершения подъема рычагов начинает перемещаться поршень -рейка 5 (см. фиг. 2), вращая шестерню 4 и осуществляя поворот гидроцилиндра с рычагами на
угол 180
По окончании поворота рычаги, поменявшись местами, опускаются к рабочей позиции и к позиции .разгрузки и загрузки деталей.
По мере опускания одна из пластин 10 поворотного рычага располагается в пазу В отсекателя 20 (см. фиг.4), а деталь, находящаяся на пластинах 10 второго рычага, укладывается на опорный нож 29 шлифовального станка, при этом фиксатор 13, взаимодействуя с упором 26, разжимает деталь, а базовые поверхности пластин 10 оп -скаются ниже.
По команде от конечника начинается процесс шлифования детали и одновременно включается привод 23, поворачивая отсекатель 20 вниз (см. фиг. 3), который освобождает детали, лежащие на подающем лотке 24, и они скатываются до упора 27. При повороте отсекателя 20 вниз его выступ Г . сталки.вает обработанную деталь по рабочей поверхности отсекателя сначала до упора 27 и дальше на отводящий лоток 25. По команде от конечника отсекаталь начинает поворачиватся вверх - с этого момента начинается повторение полного автоматическог цикла загрузки и выгрузки деталей в зону их обработки .
Формула изобретения
Загрузочно-разгрузочное устройств для подачи цилиндрических деталей в зону обработки, содержащее поворотный вокруг вертикальной оси корпус гидроцилиндра с двумя поворотными рычагами, выполненными в виде двух платин и снабженными фиксирующими элементами, отличающееся тем, что, с целью сокращения вспомогательного времени установки и съема заготовок, устройство снабжено загрузочно-разгрузочным элементом-отсекателем, выполненным в виде двух жестко связанных между собой планок и установленным с возможностью поворота вокруг горизонтально оси, по обе стороны которой в момент загрузки и выгрузки детали расположены пластины поворотных рычагов, причем на планках отсекателя предусмотрены паз для размещения Б нем одной из пластин поворотного рычага и выступ, сбрасывающий детали на отводящий лоток.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 283801, кл. В 23 Q /04, 1969. g 10 to ii -L / /
Д-4 TT 7 .X /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для групповой обработки деталей | 1990 |
|
SU1815154A1 |
| Устройство для ориентирования деталей | 1978 |
|
SU751574A1 |
| Загрузочное устройство | 1987 |
|
SU1609612A1 |
| Ориентирующее устройство | 1988 |
|
SU1604558A1 |
| Устройство для транспортирования изделий | 1977 |
|
SU682432A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Установка для очистки полых изделий | 1979 |
|
SU956069A1 |
| Загрузочное устройство | 1974 |
|
SU618255A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Загрузочное устройство | 1985 |
|
SU1301630A1 |