I
Изобретение относится к манипуляторам и может быть использовано при рабо- те с радиоактивными и вредными вешествами, а также при автоматизации производственных процессов.
Известен копирующий манипулятор, содержащий геометрически подобные задающий и исполнительный органы, состоящие из звеньев, имеющих индивидуальные приводы ij .
Недостатком известного манипулятора является низкая надежность отработки команд оператора.
Цель изобретения - повышение надежности.
Это достигается тем, что предлагаемый манипулятор снабжен командными устройствами для каждого звена исполнительного органа, выполненными в виде расположенных на звеньях задающего органа и имеющих контакты телескопических валов, приводы звеньев исполнительного органа выполнены в виде последовательно соедиHeifflbix двухпозиционных силовых элементов, установлеьшых с возможностью перемещения, связанных между собой и с соответствующим контактом, причем расстояние между .соседними контактами равно величине хода силового элемента соответствующего звена.
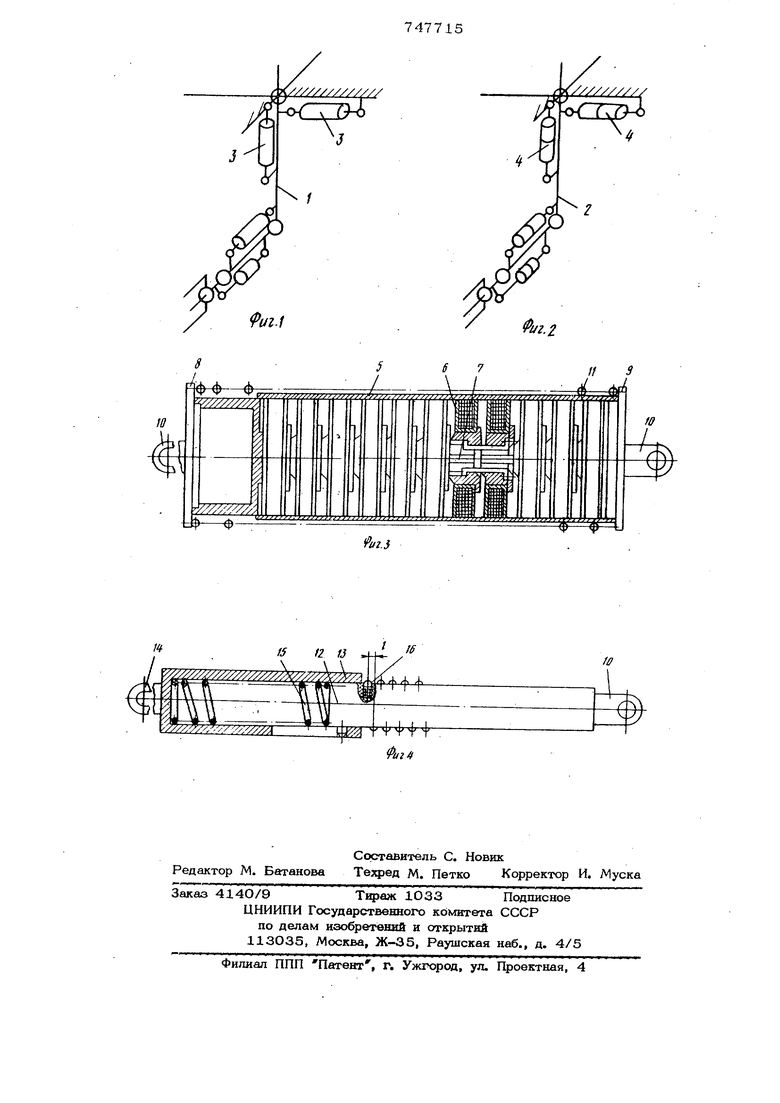
На фиг. 1 изображена схема исполнительного органа; на фиг. 2 - схема задающего органа; на фиг. 3 - привод перемещений исполнительного органа по
to одной координате; на фиг. 4 - общий вид командного устройства по этой же координате установленного на задающем органе.
Манипулятор состоит из исполнитель15ного 1 (см. фиг. 1) и задающего 2 (см. фиг. 2) органов. Перемещение исполнительного органа 1 по каждой степени свободы обеспечивается специальным приводом 3. Задающий орган 2 геометричес20ки подобен исполнительному органу 1. Комшадные устройства 4 закреплены на заеньях задающего органа аналогично . приводам перемещений звеньев исполни374
тельного органа. Задающий 2 и исполнительный 1 органы по структуре схохи со структурой руки человека.
Привод перемещений звеньев по каждой из координат (см. фиг. З) состоит из корпуса 5, в котором расположен1)1 с возможностью осевого перемещения ряд последовательно соединенных силовых элементов, например электромагнитов 6, Соседние электромагниты 6 связаны между собой стзржнями 7. На С€ рдечниках крайних электромагнитов 6 закреплены крышки 8 и 9, причем крышка 8 установлена с возможностью odBBoro перемещения. На крышках имеются тяги 10, Между крышками расположена пружина 11.
Командное устройство перемещения звеньев по из координат представляет собой телескопический вал, состоящий из вала 12 и втулки 13, на концах которых имеются тяги 14. Вал 12 и втулка 13 поджаты пружиной 15, на валу 12 размещены контакты 16, Причем расстояние между соседними контактами 16 равны t т.е. равны расстоянию между соседними электромагнитами 6. Каждый ко1ггакт 16 управляет соответствующим электромагнитом 6, число контактов и электромагнитов одинаково. Магнитные пускатели, управляющие электромагнитами 6, на чертежах не изображены
Копирующий манипулятор работает следующим образом.
Оператор задает определенное положекие задающему органу 2. При этом вал 12 командного устройства по одной из координат входит во втулку 13, часть контактов 16 замыкается Ь передает сигналы на магнитные пускатели электро магнитов 6 соответствующего привода звена исполнительного органа. Пускатели включают нужные электромагниты 6, при этом вибираются зазоры между соседними электромагнитами 6.
Крайний из включенных электромагнитов 6 через стержни 7 смещают невклю54
енные электромагниты с крышкой В относительно корпуса 5 и сжимает пружину 11. Расстояние между тягами 10 привода перемещений уменьшится на величину, равную сумме выбранных зазоров.
Таким образом, приводы перемещений по каждой координате сжимаются, и исполнительный орган занимает такое же положение в пространстве, как и задающий орган. Если застбшить задающий орган перемещаться определенным образом, то точно так же будет перемещаться и исполнительный орган. Пружина 11 сглаживает рывки, возникающие при работе электромагнитов 6, и перемещает их в исходное положение при выключении.
Формула изобретения
1. Копирующий манипулятор, содержащий геометрически подобные задающий и исполнительный органы, состоящие на звеньев, имеющих индивидуальные приводы, отличающийся тем, что, с целью повышения надежности, он снабжен командными устройствами для каждого звена исполнительного орган выполненными в виде расположенных на звеньях задающего органа и имеющих контакты телескопических валов, а приводы звеньев исполнительного сагана выполнены в виде последовательно соединенных двухпозиционных силовых элементов, установленных с возможностью перемещения, связанных между собой и с соответствующим контактом.
2. Манипулятор по п, 1, отличающийся тем, что расстояние между соседними контактами равно величине хода силового элемента соответствущего звена.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР Ns 529072, кл. В 25 Л З/ОО, 1975.
8
Ф-Ф
W/////////.
10
m
.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1972 |
|
SU965760A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Манипулятор | 1974 |
|
SU503710A1 |
| Манипулятор | 1984 |
|
SU1298070A1 |