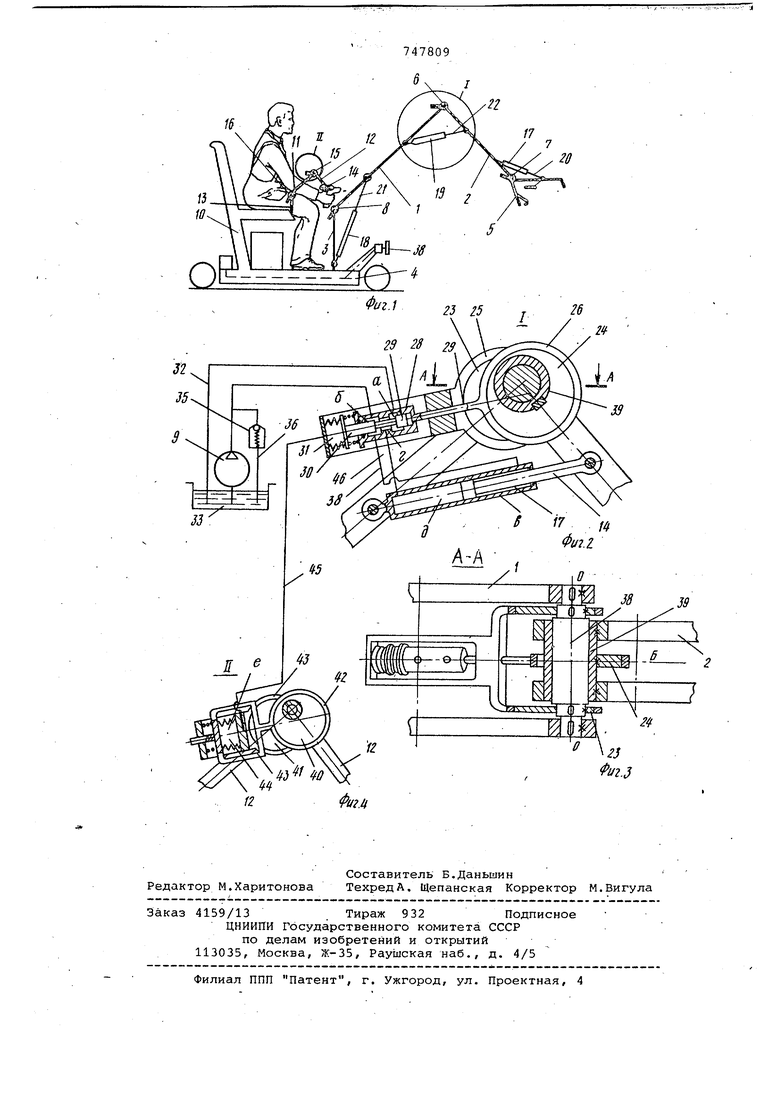
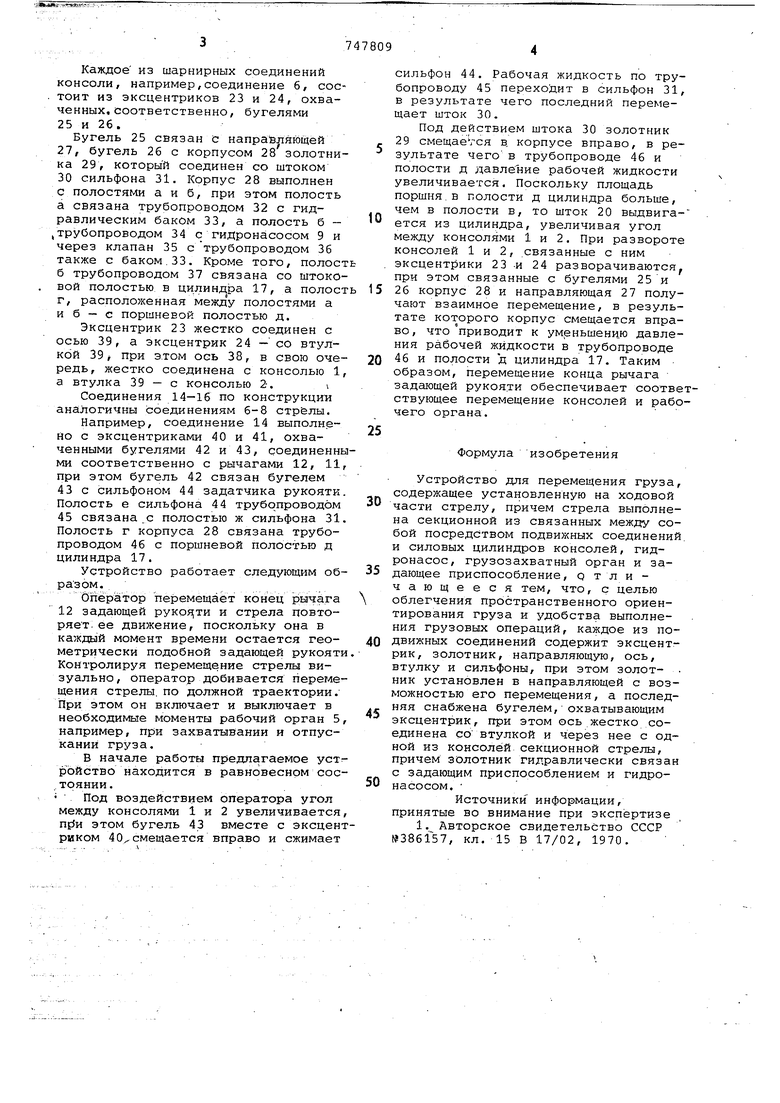
Изобретение относится к подъемно-транспортному машиностроению. Известно устройство для перемещения груза, содержащее установленную иа ходовой части стрелу, причем стрела выполнена секционной из связанных между собой посредством подвижных соединений и силовых цилиндров консолей, гидронасрс, грузозахватный орган и задающее приспо собление ij . Недостатки указанного устройства - сложность пространственного ориентирования груза и неудобство в эксплуатации. Цель изобретения - облегчение пространственного ориентирования груза иудобство выполнения грузовы операций. Для этого каждое из подви ных соединений предлагаемой конструкции содержит эксцентрики, золотник, направляющую ось, втулку и сил фоны, при этом золотник установлен в направляющей с возможностью его перемещения, а последняя снабжена бугелем, охватывающим эксцентрик, при этом осьжестко соединена со втулкой и через нее - с одной из ко солей секционной стрелы, причем золотник гидравлически связан с задающим приспособлением и гидронасосом. На фиг. 1 схематично изобра :;епо описываемое устройство; на фиг. 2 - шарнир стрелы (узел I на Фиг. 1); на фиг. 3 - сечение А-А фиг. 2; на фиг. 4 - шарнир задающего приспособления (узел на фиг. ) Устройство для перемещения груза содержит стрелу из шарнирно сочлененных консолей 1 и 2, связанных со стойкой 3, которая установлена на ходовой части 4. Консоль 2 снабжена грузозахват,нйм органом 5. Консоли 1 и 2 связаны между собой с грузозахватным органом и стойкой посредством подвижных соединений 6-8 соответственно. На ходовой части 4 установлены гидронасос 9 и сиденье 10 для one;атора, на котором, выполнена задающая рукоять, содержащая рычаги 1113, связанные между собой подвижными соединениями . По форме задающая рукоять подобна стреле. Консоли 1 и 2 стрелы и стойка 3 снабжены силовыми цилиндрами 19, штоки 20-22 шарнирно связаны соответственно с органом 5, консолями 1 и 2. Каждое из шарнирных соединений консоли, например,соединение 6, сос. тоит из эксцентриков 23 и 24, охваченных, соответственно, бугелями 25 и 26. Бугель 25 связан с напраьляйщей 27, бугель 26 с корпусом 28 золотника 29, который соединен со штоком 30 сильфона 31. Корпус 28 выполнен с полостями а и б, при этом полость а связана трубопроводом 32 с гидравлическим баком 33, а полость б - Jтрубопроводом 34 с гидронасосом 9 и через клапан 35 с трубопроводом 36 также с баком.33. Кроме того, полост б трубопроводом 37 связана со штоковой полостью в цилиндра 17, а полост г, расположенная между полостями а и б - с поршневой полостью д. Эксцентрик 23 жестко соединен с осью 39, а эксцентрик 24 - со втулкой 39j при этом ось 38, в свою очередь, жестко соединена с консолью 1 а втулка 39 - с консолью 2-. Соединения 14-16 по конструкции аналогичны соединениям 6-8 стрелы. Например, соединение 14 выполнено с эксцентриками 40 и 41, охваченными бугелями 42 и 43, соединенны ми соответственно с рычагами 12, 11 при этом бугель 42 связан бугелем 43 с сильфоном 44 задатчика рукояти Полость е сильфона 44 трубопроводом 45 связана.с полостью ж сильфона 31 Полость г корпуса 28 связана трубопроводом 46 с поршневой полостью д цилиндра 17. Устройство работает следующим об раэом. бпёратор перемещает конец рычага 12 задающей и стрела повторяет: ее движение, поскольку она в каждадй момент времени остается геометрически подобной задающей рукоят Контролируя перемещение стрелы визуально. Оператор добивается переме щения стрелы, по должной траектории. При этом он включает и выключает в необходимые моменты рабочий орган 5 например, при захватывании и отпусканий груза. В начале работы предлагаемое уст ройство находится в равновесном сос тоянии . Под воздействием оператора угол между консолями 1 и 2 увеличивается пр$и этом бугель 43 вместе с эксцен риком 40 смещается вправо и сжимает
747809 сильфон 44. Рабочая жидкость по трубопроводу 45 переходит в сильфон 31, в результате чего последний перемещает шток 30. Под действием штока 30 золотник 29 смещаемся в корпусе вправо, в результате чего в трубопроводе 46 и полости д давление рабочей жидкости увеличивается. Поскольку площадь поршня.в полости д цилиндра больше, чем в полости в, то шток 20 выдвигается из цилиндра, увеличивая угол между консолями 1 и 2. При развороте консолей 1 и 2, связанные с ним эксцентрики 23 -и 24 разворачиваются, при этом связанные с бугелями 25и 26 корпус 28 и направляющая 27 получают взаимное перемещение, в результате которого корпус смещается вправо, чтоприводит к уменьшению давления рабочей жидкости в трубопроводе 46 и полости д цилиндра 17. Таким образом, перемещение конца рычага задающей рукоя.ти обеспечивает соответствующее перемещение консолей и рабочего органа. Формула изобретения Устройство для перемещения груза, содержащее установленную на ходовой части стрелу, причем стрела выполнена секционной из связанных между собой посредством подвижных соединений, и силовых цилиндров консолей, гидронасос, грузозахватный орган и задающее приспособление, Q тли чающееся тем, что, с целью облегчения пространственного ориентирования груза и удобства выполнения грузовых операций, каждое из подвижных соединений содержит эксцентрик, золотник, направляющую, ось, втулку и сильфоны, при этом золот- . ник установлен в направляющей с возможностью его перемещения, а последняя снабжена бугелем, охватывающим эксцентрик, при этом ось жестко соединена со втулкой и через нее с одной из консолей секционной стрелы, причем золотник гидравлически связан с задающим приспособлением и гидронасосом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №386157, кл. 15 В 17/02, 1970.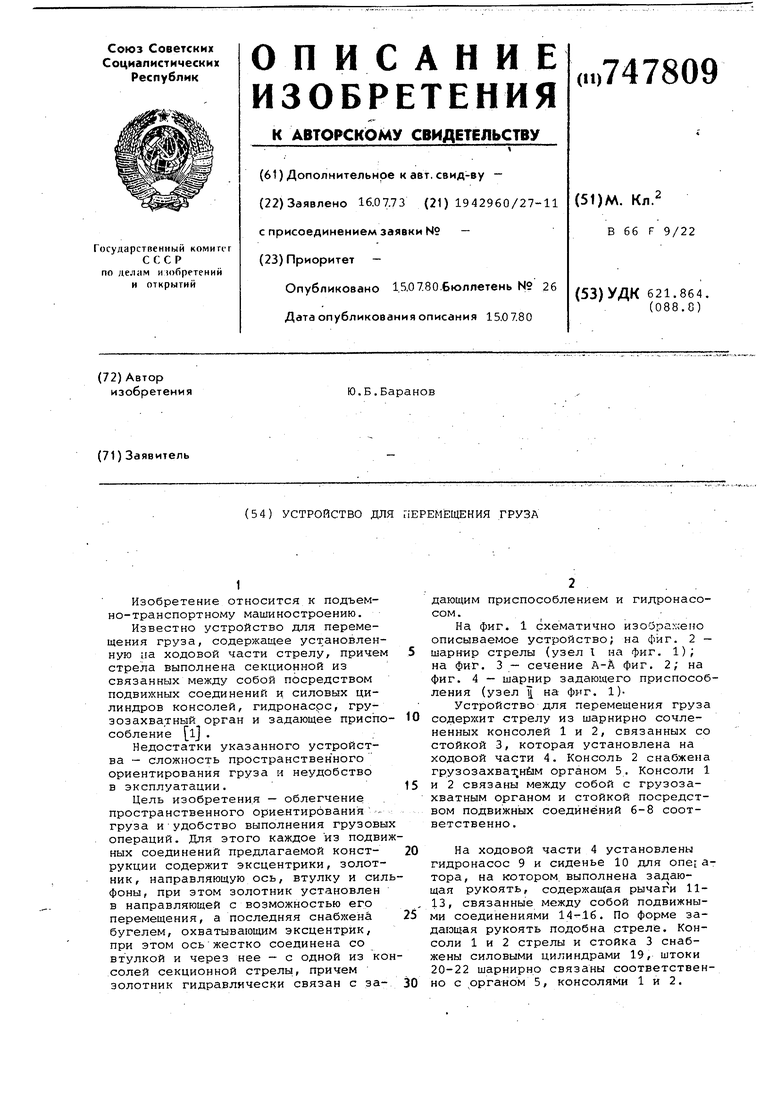
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Кран-манипулятор | 1988 |
|
SU1668278A1 |
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Консольный кран | 1980 |
|
SU931682A1 |
| ПЕРЕДВИЖНОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1997 |
|
RU2137700C1 |
| Манипулятор | 1984 |
|
SU1255553A1 |