(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов | 1982 |
|
SU1070092A1 |
| Транспортная тележка | 1983 |
|
SU1105356A1 |
| Устройство для перемещения грузов | 1980 |
|
SU921998A1 |
| Устройство для кантовки сталеразливочных ковшей | 1981 |
|
SU944784A1 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1530535A1 |
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| Устройство для транспортировки и опрокидывания бочек | 1988 |
|
SU1585229A1 |
| Устройство для загрузки и разгрузки стеллажей | 1983 |
|
SU1134484A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
1
Изобретение предназначено для подъема, транспортирования и кантовки на определенных позициях грузов, преимущественно сыпучих, и может применяться в различных отраслях промышленности при производстве погрузочно-разгрузочных работ.
Известен ковшовый конвейер, производяший перемещение, разгрузку грузов на определенных позициях, причем грузонесущий орган выполнен в виде ковшей, подвешенных на осях, прикрепленных к пластинам цепей 1.
Ковши указанных конвейеров разгружаются на верхнем горизонтальном участке опрокидыванием их при помощи специальных разгрузочных устройств. При этом для опрокидывания ковшей требуется дополнительная затрата мощности для преодоления момента, создаваемого весом груза и самого ковша, относительно оси опрокидывания.
Наиболее близкое к предлагаемому устройство для перемещения грузов содержит тележки, ролики которь1х установлены на направляющих, ползун с захватом и рычагом, привод и блоки с гибким тяговым органом 2.
Однако это устройство имеет постоянную скорость транспортирования на вертикальных и горизонтальных участках, что ведет к увеличению мощности привода. Кроме того, данная конструкция не может быть исJ пользована при работе с сыпучими грузами, заключенными в емкость и требующими опрокидывания в местах разгрузки.
Цель изобретения - снижение потребляемой мощности.
Указанная цель достигается тем, что захват установлен с возможностью поворота и снабжен роликом для взаимодействия с направляющей, которая имеет пазы с подвижными площадками, причем блоки расположены на ползуне и тележке.
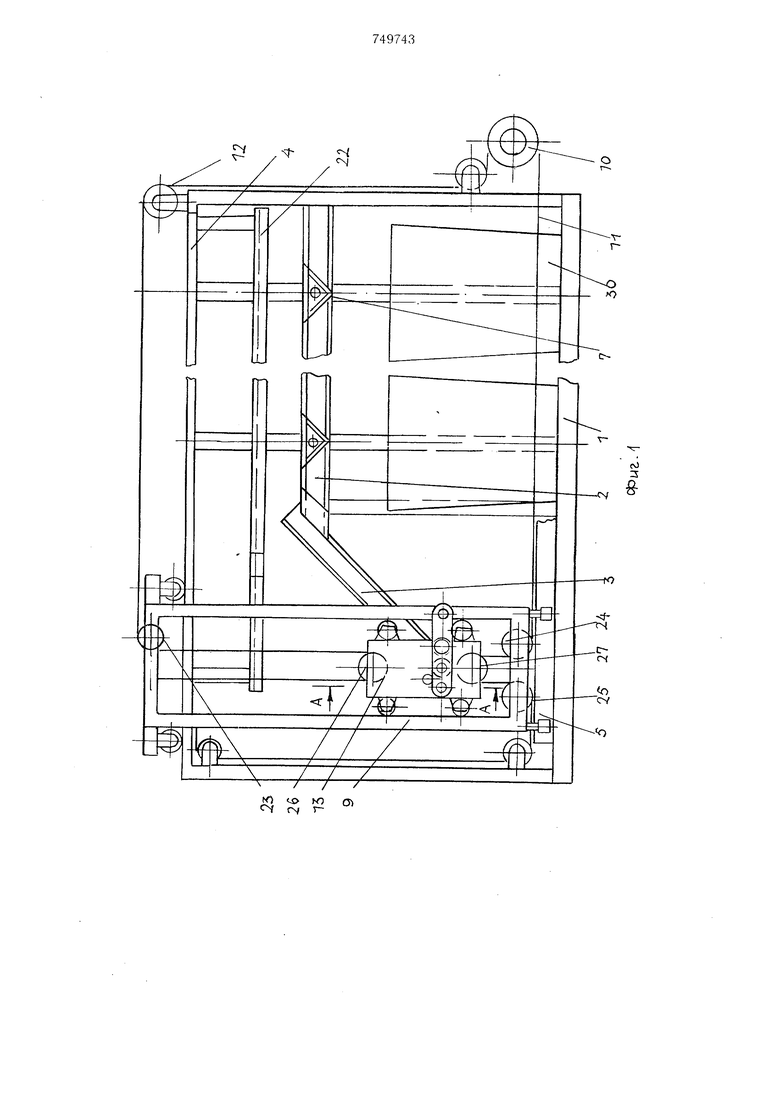
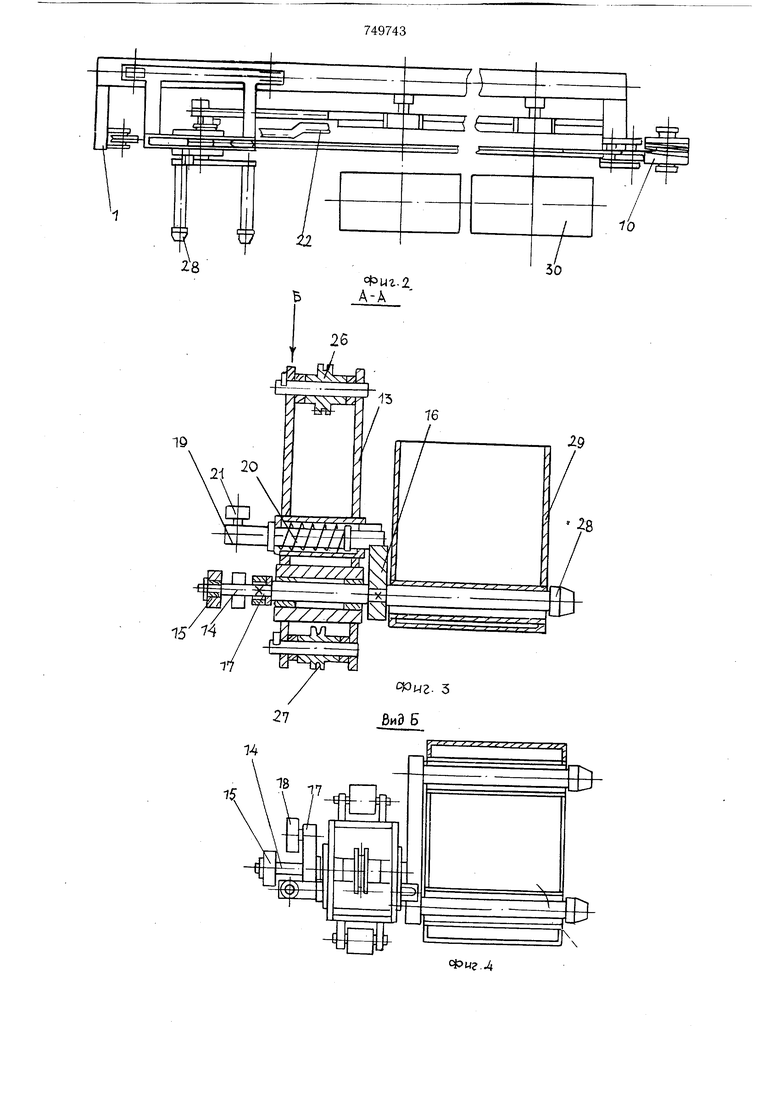
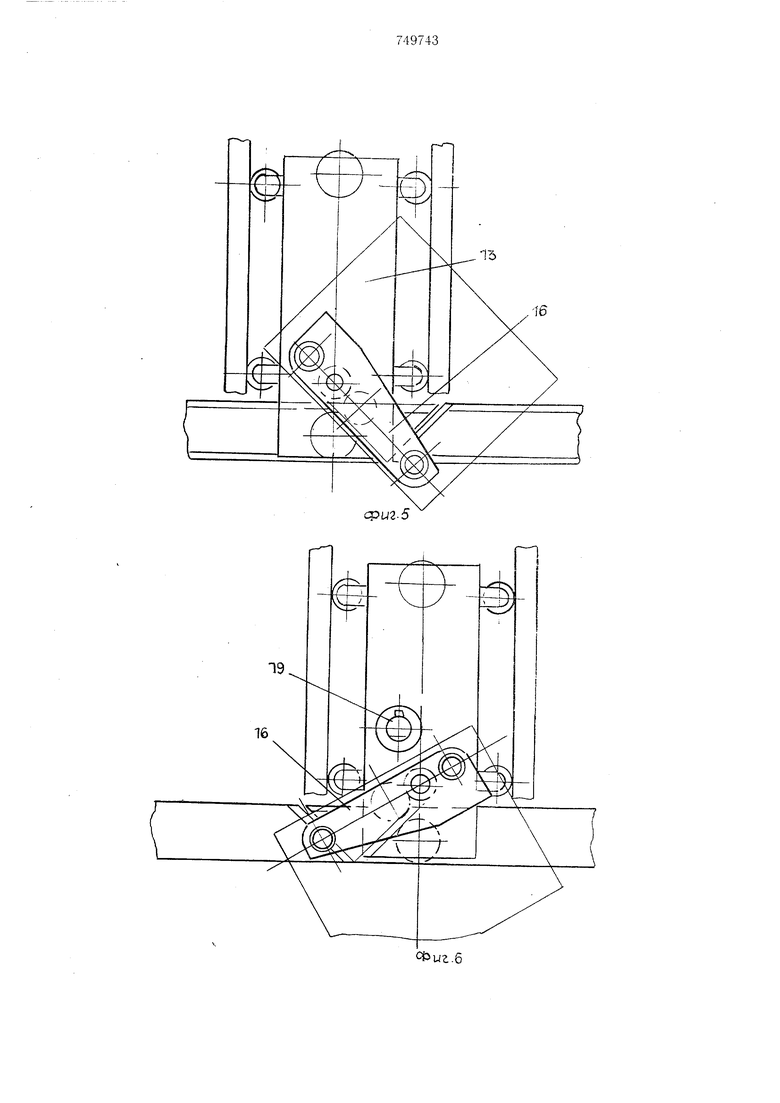
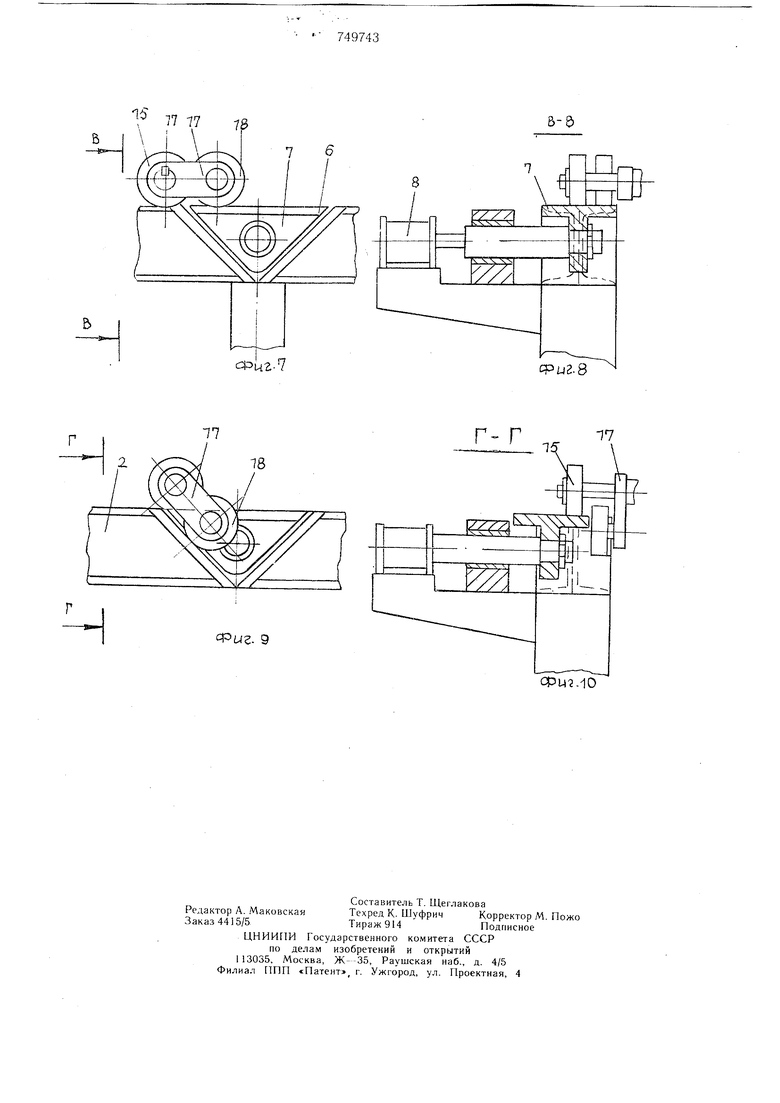
На фиг. 1 показано устройство для перемещения грузов, общий вид; на фиг. 2 - план устройства; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - ползун устройства в момент
20 начала кантовки; на фиг. 6 - то же, перед окончанием кантовки; на фиг. 7 - вид на закрытый угловой паз и опорные ролики ползуна; на фиг. 8 - разрез В-В на фиг. 7; на фиг. 9 - вид на открытый угловой паз фиг. 10 разрез и ролики ползуна; Г - Г на фи. 9. Устройство для перемещения грузов состоит пз рамы 1, на которой установлены опорные направляющие 2, укосина 3, верх:я направляющая 4, нижняя иаправляюцая 5 и угловые назы 6, снабженные площалKHiviH /, перемещаюпшмися в поперечном направлении от привода 8 Тележка 9 установлена с возможностью перемещения от привода 10 при помоиш троса 11 и отключаюпщл блоков 12 и снабжена ползуном 13, на оси 14 которого имеется опорный ролик 15, а также жестко смонтированы захват 16 и рычаг 17 с роликом 18. Упор 19 снабжен пружиной 20 и роликом 21, взаимодействуюпдим с копиром 22, тележка 9 - блонами 23-25, а ползун 13 - блоками 26 и 27. Захват 6 имеет вилы 28, несущие тару 29. По трасе перемещения устройства установлены емкости 30. Устройство для перемещения грузов работает с медующим образом. В крайнем левом положении на вилы 28 захвата 16 устаналивают сменную тару 29 с транспортируемым грузом, например стружкой. Захват 16 удерживается от опрокидывания упоро.м 19. В зависимости от материала включают привод 8, перемещающий площадку 7, соответствующую определенной емкости 30. Затем включают привод 10. При взаимодействии опорного ролика 15 ползуна 13 с укосиной 3 происходит передвижение тележки 9 и одновременный подъе.м ползуна 13, при этом блок 26 работает как подвижный, что позволяет снизить мощность, затрачиваемую на подъем ползуна с транспортируемым грузом. Скорость транспортирования на этом участке снижается. После окончания подъема ползуна 13 ролики 15 и 18 вкатываются на опорные нанравляюпще 2. При этом блок 26 ползуна 13 работает как отклоняющий и скорость транспортирования на горизонтальном участ73 ке возрастает вдвое. Ролик 21 упора 19, взаимодействуя с копиром 22, освобождает захват 16, который удерживается от кантовки роликом 18. Тележка 9 перемещается до заданного углового паза 6. При этом ролики 15 и 18 катятся по опорным направляющим 2 и площадкам 7, перекрывающим незадействованные угловые пазы 6. Так как ось 14 захвата 6 смещена по отнощению к центру тяжести тары 29, ролик 18 рычага 17 скатывается в заданный угловой паз 6. Начинается поворот захвата 16 вокруг оси 14, опорный ролик 15.который катится при этом по площадке 7. При последующем движении тележки 9 ролик 18, продолжая взаимодействовать с угловым пазом 6, производит дальнейщий поворот захвата 16 на 180° Стружка ссыпается в емкость 30, после чего система возвращается в исходное положение. Происходит обратная кантовка на 180°. Формула изобретения Устройство для перемещения грузов, содержащее тележки, ролики которых установлены на направляющих, ползун с захватом и рычагом, привод и блоки с гибким тяговым органом, отличающееся тем, что, с целью снижения потребляемой мощности, захват установлен с возможностью поьорота и снабжен роликом для взаимодействия с направляющей, которая имеет пазы с подвижными площадками, причем блоки расположены на ползуне и тележке. Источники информации, принятые во внимание при экспертизе 1.Сливановский А. О., Дьячков В. К. Транспортирующие мащины, «Машиностроение, М., 1968, с. 213-217. 2.Авторское свидетельство СССР № 416299, кл. В 65 G 25/00, 1974.
Ю to ю о fN V-16
CPU2-5
77 77 7Э
сРцгЛ
в-а
п
.
сриг.8
