1
Изобретение относится к области автоматики.
По основному авт. свид. № 392453 известен следящий привод, содержащий последовательно включенные задатчик, элемент сравнения, усилительпреобразователь, исполнительный двигатель, нагрузку, к выходу которой подключены компенсатор статических сшибок и датчик положения нагрузки, выходы которых подключены ко входам элемента сравнения, а также блок определения знака и цепь из последовательно включенных корректора люфта, вход которого подключен к выходному . валу нагрузки, ключевого элемента, управляющий йход которого соединен с выходом исполнительного двиЬателя, сумматора и блока умножения, выхсд которого подключен к входу усилителя-преобразователя, причем выхсм корректора люфта подключен к входу сумматора, при этом вход блока определения знака соединен с выходом элемента сравнения, а его выход подключен к входу блока умножения ij .
Известный следящий привод имеет ограничение области применения из-Зс отсутствия возможности работать от
различных входных параметров, изменяющихся по различным зависимостям, а также из-за отсутствия возможности с осуществлять коррекцию не только статических погрешностей, но и погрешностей от воздействия различных внешних факторов (температуры, давления и т.п.).
10
Цель изобретения - расширение области применения следящего привода.
Указанная цель достигается тем, что в известный следящий привод вве.с ден функциональный преобразователь, причем выход нагрузки соединен через функциональный преобр азователь с четвертым входом элемента сравнения.
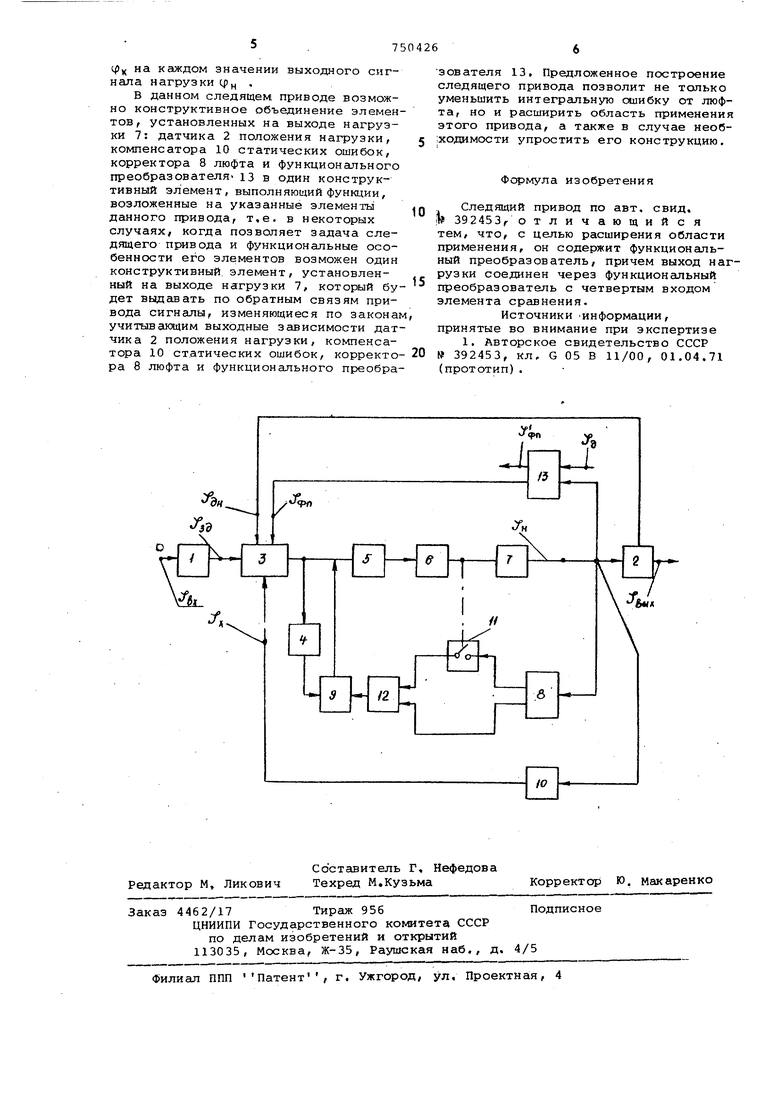
20 На чертеже приведена функционгшьная схема следящего привода.
Устройство содержит задатчик I, датчик 2 положения нагрузки, элемент 3 сравнения, блок 4 определения зна)г«
25 ка, усилитель-преобразователь 5, исполнительный двигатель 6, нагрузка 7, корректор 8 люфта, блок 9 умножения,
компенсатор 10 статических ошибок, ключевой элемент 11, сумматор 12, 30 .функциональный преобразователь 13. Привод работает следующим образом При движении выхсщного элемента исполнительного двигателя 6 в одну сторону с выходов корректора 8 люфта на сумматор 12 поступают равные по величине и противополох ные по знаку сигналы, величина каждого из которых соответствует положению нагрузки 1, При этом ключевой элемент И замкнут сигнал на выходе сумматора 12 равен нулю. В этом случае на вход усилителя- преобразователя 5 не поступает сигнал от корректора 8 люфта. В случае изменения знака скорости на выходе исполнительного двигателя б ключевой элемент 11 разгж1кает цепь одного из сигналов на входе сумматора 12. В результате на выходе сумматора появляется сигнал величина которого соответствует положению нагру ки 7, Причем сигнал коррекции люфта на выходе сумматора 12 действует в течение времени, необходимого для отработки минимальной зоны люфта на всем диапазоне работы следящего привода. Э-тот сигнал подается на вход блока 9 умножения, где ему присваива ется знак сигнала ошибки. Затем сигнал проходит на хс(ц усилителя- преоб разователя 5, форсируя прохождение люфта. Кроме того, положение нагрузки 7 определяет величину механического сигнала фц, послупающего на входы датчика 2 положения нагрузки, компен сатора 10 статических оиибок и функционального преобразователя 13, В за висимости от величины и знака сигнала с нагрузки 7 - срн указанные элементы выдают соответствующие сигна ФЭч ч Чк 1 Чдап а входы элвмент 3 сравнения.Сигнал - Фд , поступающий на эле мент сравнения 3 от датчика 2 положе ния нагрузки,является сигналом обрат ной связи и служит для отслеживания нагрузкой 7 входного сигнала (параме ра) следящего привода. Отслеживание осуществляется по величине и знаку разности сигналов, поступающих от за датчика 1 ip g к датчика положения нагрузки 2 Ф9нСигнал ф|, поступающий на элемент 3 сравнения от компенсатора 10 стати ческих ошибок, учитывает величину и знак статической сшибки (погрешности на значении выходного сигнала нагрузки (р„ и служит для компенса НИИ статических сшибок (погроиностей следящего привода при медленно изменяющихся входных .воздействиях (сигна лах) , Сигнал %э„, поступающий на элемент 3 сравнения от функционального преобразователя 13, учитывает величину и знак выходного сигнала нагрузки, а также величину и знак входного дополнительного сигнала следящего привода фд и служит для изменения закона работы нагрузки 7 и зависимости изменения выходного сигнала от входного сигнала (параметра) следящего привода. При этом в функциональном преобразователе 13 зависимость выходного сигнала цЗф г1. от входных сигналов If и ,tp9 может йлть различной и перенастраиваемой в соответствии с задачей, решаемой следящим приводом. Таким образом, функциональный преобразователь 13 осуществляет обработку одного или нескольких независигФгх входных сигналов ( выдает один или несколько сигналов (ф ср..п) каждый из которых изменяется пО требуемой функции одного или нескольких незсшисимых переменных параметров. При этом один из выходных сигналов фф.п. функционального преобразователя 13 поступает на вход элемента 3 сравнения. Это позволяет следящему приводу работать при различных входных параметрах (не только перемещений, но и температуры, давления и т.п.), из|меняю цихся по различным зависимостям, а также появляется возможность осуществлять коррекцию погрешностей следящего электропривода при воздействии различных внешних факторов, которые учитываются при регулировании следящего привода путем обработки дополнительного сигнала (рр в функциональном преобразователе 13. Кроме того , у следящего привода появляется возможность выдавать изменяющиеся по различным зависимостям (т.е. различные по величинам и знакам) выходные сигналы в другие устройства и систеьи, работающие совместно.с данным приводом. В качестве функционального преобразователя 13 может быть использовано, например, устройство, которое работает как электромеханическая аналоговая универсаЛ1 ная счетно-решающая машина 2-х независикых переменных параметров , Для работы следующего привода на несколько взаимосвязанных систем или устройств в качестве функционального преобразователя 13 может быть использовано, например устройство того же типа с несколькими выходными сигналами, изменяющимися мо различным настраиваемым и регулируегллм зависимостям от вхсщных сигналов, т.е. от сигналов fn ц) В случае необходимости данной следящий привод может функционировать без датчика 2 положения нагрузки и компенсатора 10 статических ошибок и без их связей, В этом случае задачи, возложенные на датчик 2 и компенсатор 10, должны решаться функциональным преобразователем 13, т.е. выходной сигнал функционального преобразователя 13 фф,, должен соответствовать §лгебраической сумме сигналов (f- и
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU392453A1 |
| Следящий электропривод | 1987 |
|
SU1442973A1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| Следящий электропривод | 1985 |
|
SU1332260A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
