соединенных с регулируемым приводом вращения, а одна из секций сиабжеиа допо.чинтельиыми кулачками, взаимодействуюндпми с дросселями гндроцилиндров нродольного перемещения опор.
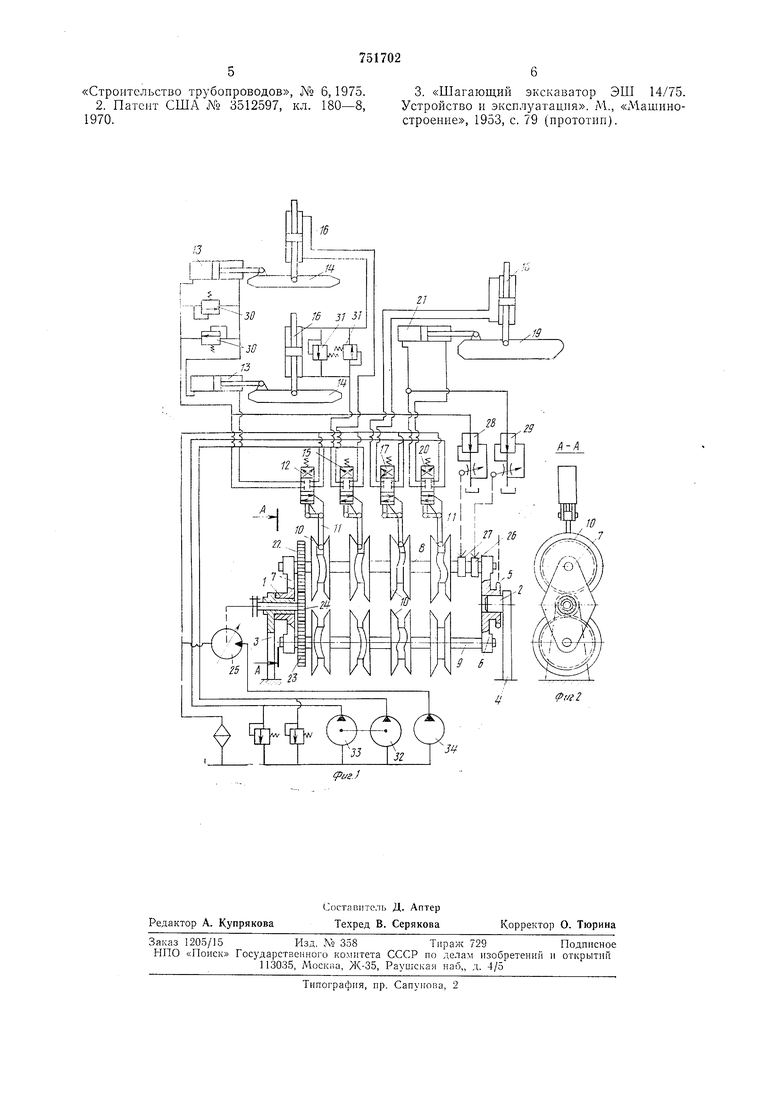
На фиг. 1 ноказаиа общая схе.ма гидросистемы; на фиг. 2 - разрез А-А на фиг. 1.
Гидросистема состоит из командоаппарата, основу которого составляет кассета, устаповленная поворотно в нодшппнпках 1 и 2 па кронштейнах 3 и 4. Поворот кассеты осущеетвляется е помощью пенного управляющего привода 5. Кассета состоит из боковых щек 6 и 7, в которых па одинаковом расстоянпн от оси поворота в подшпппиках смонтированы секпип нрямо|-о хода 8 н обратного хода 9. Ма секцпях 8 п 9 зак)е1 лепы тор11, кулачкп 10, копта ч1пру1ОН1,не через рычагп 11 с гпдрозолотппком 12, связанным с гндроцнлпндрамн 13 нродольпого перемещения крайних опор 14, с гидрозолотпиком 15, связанным с гидроцилнпдрамп 16 вертикальиого перемещенпя крайпих оиор 14, с гидрозолотннком 17, связанным с гндроцнлппдром 18 вертикальпого перемещення средней оноры 19 н с гпдрозолотннком 20, связанным с гндроцплнндром 21 продольного перемещенпя ередпей оноры 19.
Торцовые ку-лачкп 10 пмеют такую форму н такое взаимное смещеппе, нрн которых выполпяетея заданная ноеледовательноеть неремещення опор 14 н 19. Секции 8 п 9 связапы шестерепчатым приводом, еостояп пм нз колес 22, 23 н нрнгюдиой шестерни 24, которая соединена приводом е регулируемым гндромО Ором 25. На секции 8 смонтированы донолн1ггельные диековые кулачкн 26 н 27, евязанные с ре1у.лятором дросселей 28 н 29. В систему гндроцилпндров 13, 16 установлены нредохраннтельные клананы 30 п 31, обесиечивающпе подпитку полостей идроцилиндров 13 и 16 при пх еинхроппой работе.
Питание гидроуправлепия осуществляется от насосной стагщни, состоящей из соедииеппых общпм приводом гпдропаеосов 32 и 33 и гидронасоса 34, обеспечивающего вращение гидромотора 25.
Гндроеистема работает следующим образо.м. При нередвижении шагохода внеред вращение от гидромотора 25 передается через шеетерпю 24 и колеса 22, 23 секциям 8 и 9. При этом торцовые улачки 10 через рычаги 11 поочередно управляют гидрозолотнпками 12, 15, 17, 20, которые, в евою очередь, управляют гидроцплпндрами 13, 16, 18, 21, которые поочередно неремещают крайние опоры 14 п среднюю 19. Регуляторы дросселей 28, 29 посредством кулачков 26, 27 нонернуты в крайнне ноложепня, что соответствует перекрытию сливных трубопроводов. Вертикальные колебания рамы мащины при этом устраняются нутем уекоренпого передвижения каждой опоры по холостой траектории, что достигается за
счет подачн раоочей жидкости в штоковые нолоетн гндроцилиндров i:i и 21 иродольного иеремещепия. При этом скорости и нараметры гидроцилиндров подобраны такими, нри которых время нередвижеиия каждой оиоры но холостой траектории движения равно времени ее передвижения по рабочей траектории. Для иередвижеиия шагохода иазад посредством цепиого привода 5 производится иоворот кассеты до соприкосповепия торцовых кулачков 10 секции 9 с рычагами 11. При этом унравлепие гидроцилиндрами 13, 14, 16, 18 будет выполняться в обратной последовательности. Вертикальные колебания рамы машпиы ири обратном иередвижении будут также отеутствовать, так как в MOMeirr иоворота каесеты одновремеиио от кулачков 26, 27 иовериутся п регуляторы дросселей 28, 29 в протпвоположную сторону. При этом откроются слпвные трубопроводы, и скорость гидроци-тиндров ири нодаче жидкостп в их поршпевые полости будет ниже, чем при подаче жидкоетн в штоковые полости. И в этом случае
условие передвижепия шагающего движителя без вертикальных колебаний рамы будет также выиолпено. Прн нереездах но вязким и иеровным груитам длина и высота шага могут быть увеличеиы путем сипжеПИЯ чисел оборотов гидромотора 25.
Применение изобретения иозволяет унростнть систему управлеппя шагающпм двпжителем, осуществляя прямой и обратный ход и регулирование длины и высоты шага
ири сохранении горизонтальности движения.
Форм у л а и 3 о б р е г е н и я
Гидросистема шагающего движителя, содержащая командоаппарат для передвижения в заданной носледовательноетн зо.тотников управления гидроцплиндрами вертикального и горизонтального неремещения шагающих опор, регулируемые дроссели,
предохранительные клапапы, гидронасосы и трубопроводные коммуникации, о т л н ч а ющаяея тем, что, с целью обесиечения возможности реверсирования хода движителя и возможности регулирования высоты и
длины шага оиор при сохранении горнзо)тальностн движения, комапдоаинарат выполиен в виде новоротной кассеты, в которой иа одипаково.м расстояпии от оси вращеиия, параллельпо ей устаповлены две
секции, попеременно взаимодействующие е золотниками кулачков, еоедииенных с регулируемым приводом вращеиия, а одиа из еекций снабжена донолнительными кулачками, взаимодействующими с дросселями
гидроцилиндров иродольного иеремещения оиор.
PIcToqHHKH информации, принятые во внимание ири экснертизе 1. Оеинов В. П. Возможность строительетва трубопроводов в летнее время.- «Строительство трубопроводов, № 6, 1975. 2. Патент США № 3512597, кл. 180-8, 1970. 3. «Шагающий экскаватор ЭШ 14/75. Устройство и эксплуатация. М., «Машиностроение, 1953, с. 79 (прототнн).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНОЕ КРЕСЛО | 1970 |
|
SU288257A1 |
| Стенд для испытания транспортных средств | 1977 |
|
SU659925A1 |
| Способ сборки управляемого моста автомобиля | 1975 |
|
SU599954A1 |
| Ходовой механизм щагающего типа | 1976 |
|
SU659695A1 |
| Роторное почвообрабатывающее орудие | 1974 |
|
SU683652A1 |
| Вездеход | 1974 |
|
SU649610A1 |
| Шагающий механизм для квадратно-гнездовых сеялок | 1958 |
|
SU122971A1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| УСТАНОВКА ДЛЯ РАСТРОВОЙ СТЕРЕОСЪЕЛ1КИ | 1971 |
|
SU294122A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1971 |
|
SU414148A1 |
