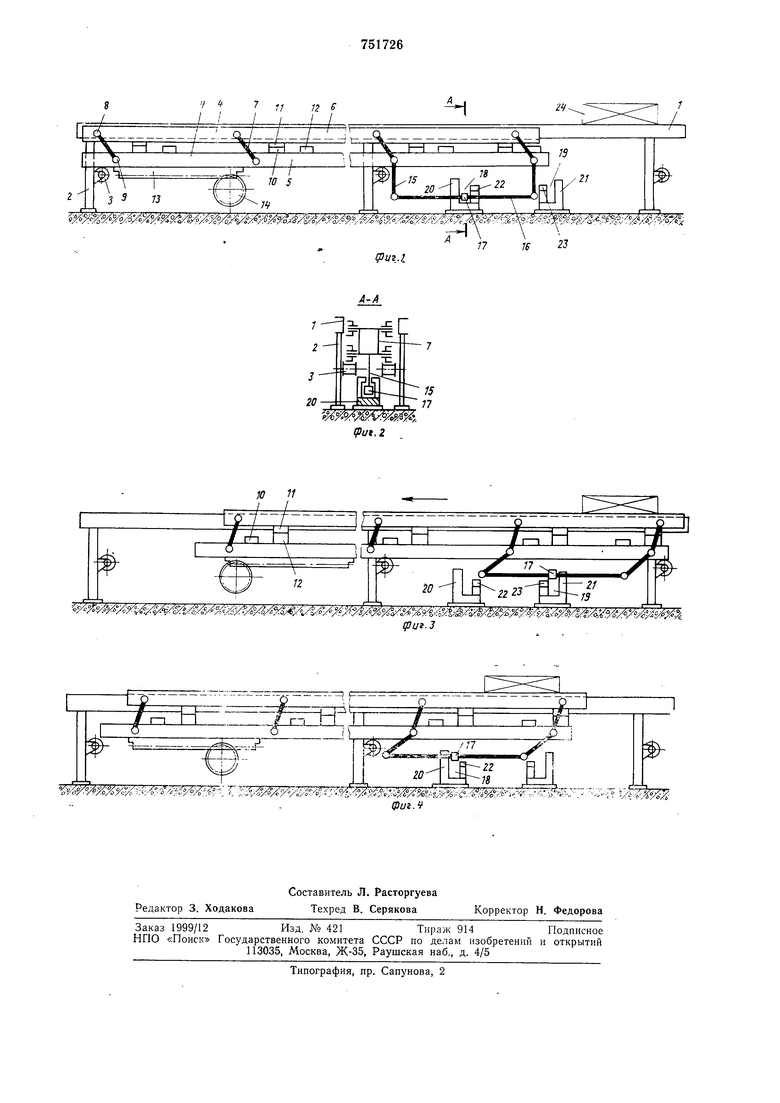
нирно соединенные между собой парами стержней 7 с шарнирами 8 и 9. Балки 5 и 6 снабжены разновысокими илатиками 10, 11 и 12 для удержания подъемной балки 6 в требуемых положениях относительно неподвижной рамы 1. Опорная балка 5 жестко соединена с рейкой 13, входящей в зацепление с шестерней 14 привода. Две пары стержней 7 выполнены в виде двуплечих рычагов 15, связанных между собой жесткой тягой 16, на которой закреплен с возможностью перестановки по длине тяги с целью смеш,ения зоны обслуживания конвейера сухарь 17, периодически взаимодействуюш,ий с пазами 18 и 19, расположенными между упорами 20 и 21 и ограничителями 22 и 23, жестко закрепленными на одном основании с неподвижной рамой 1, на которой устанавливается груз 24, транспортируемый в направленин, указанном на фиг. 3.
Шагаюш,ий конвейер работает следуюшим образом.
Для перемещения груза 24 включают привод шестерни 14, которая, вращаясь в начале рабочего цнкла по часовой стрелке, перемещает рейку 13, а вместе с ней н подвижную раму 4 вправо, при этом подъемная балка 6, перемещаясь совместно с опорной балкой 5, находится ниже опорной поверхности неподвижной рамы 1. Сухарь 17, закрепленный на тяге 16, проходит под ограничителями 22 н 23 и упирается в упор 21. Подвижпая рама 4 продолжает движение, а упор 21, воздействую на сухарь 17, передает зсилие через тягу 16 д,вуплеч 1м рычагом 15 и поворачивает стержни 7, приподнимая подъемную балку вместе с грузом выще уровня опорной поверхности неподвижной рамы 1. При этом сухарь 17 скользит по упору 21 вверх и заходит в паз 19. При прохождении шарниров 8 мертвых точек (вертикальное положение стержней 7) подъемная балка 6 под действием собственной массы и массы груза стремится к свободному падению по траектории, обусловленной радиусом поворота стержней 7 вокруг шарниров 9. От падеиия подъемную балку 6 удерживает сухарь 17, скользящий вверх по пазу 19 и упирающийся в ограничитель 23. Таким образом, благодаря ограничителю 23 обеспечивается плавность опускания подъемной балки 6 вместе с грузом 24. Платики 11 подъемной балки 6 отрываются от платиков 10 опорной балки 5 и приходят в соприкосновение с платиками 12, после чего включается реверсивное движение и рама 4 с грузом 24 перемещается в направлении, указанном на фиг. 3. Сухарь 17, пройдя над ограничителями 23 и 22, упирается в упор 20 и при дальнейщем движении подвижной рамы 4 скользит по пазу 18 вниз, передавая усилие двуплечим рычагам 15, которые, поворачиваясь против часовой стрелки, опускают подъемную балку 6 и груз укладывается на неподвижную раму 1.
При переходе шарниров 8 мертвых точек от свободного падения подъемную балку 6 удерживает сухарь 17, упирающийся в ограничитель 22, который обеспечивает плавное опускание груза 24 на неподвижную раму 1, а балки 6 до соприкосновения платиков И с платиками 10. Рама 4 занимает исходное положение и цикл повторяется.
Изобретение обеспечивает плавную работу конвейера при подъеме или опускании подъемной балки благодаря сухарю, взаимодействующему с упорами и ограничителями, позволяет исключить ударные нагрузки, в особенности на тяжело нагруженных конвейерах, увеличить срок службы и повысить надежность работы конвейера.
Формула изобретения
Шагающий конвейер, содержащий неподвижную раму, установленную на опорных
катках подвижную раму, вынолненную из двух балок, попарно связанных между собой шарнирными стержнями, и прнвод, отличающийся тем, что, с целью новышения надежности конвейера путем ликвидации ударных нагрузок и увеличения его срока службы, он снабжен неподвижными упорами и ограничителями, а две нары шарнирных стержней выполнены в виде двуплечих рычагов, шарнирно соединенных
между собой жесткой тягой, на которой установлен сухарь, взаимодействующий с неподвижными унорамн и ограничителями при подъеме и опускании груза.
Источники информации,
принятые во внимание нри экснертизе
1.Авторское свидетельство СССР № 564230, кл. В 65G 25/04, 1974.
2.Патент ГДР № 83540, кл. 49 М 7/14, опублнк. 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Конвейер для штучных грузов | 1977 |
|
SU948085A1 |
| Привод шагающего конвейера | 1979 |
|
SU876530A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Захватное устройство | 1985 |
|
SU1306887A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2010 |
|
RU2453491C1 |
.(
