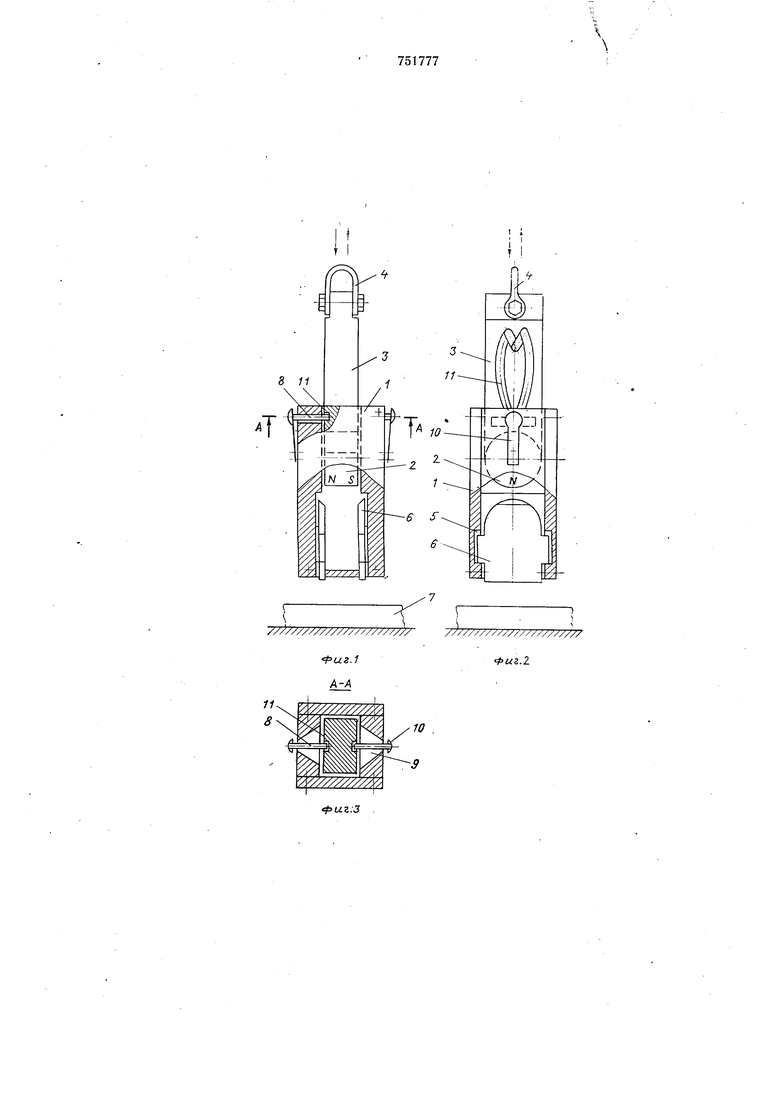
ней части жор-пуса, ,в вертикальных пазах
5установлены две лла стины 6 из матнито. проводящего материала. Пластины имеют возможность смещаться иверх, устанавливаясь своей кромкой заподлицо с нижней новерхностыо корпуса, или 1выступать из него-и контактировать с захватываемым грузом 7. иМ.еханизм фиксации положения Магнита 2 включает два пальца 5, размещенных в верхней части корпуса в отверстиях Я расщиряющихся s горизонтальной плоскости и имеющих фо,рму треугольника 1верщиной наружу. Плоские пружины JO прижимают 1внутрь нальцы «5.
На соответствующих двух боковых гранях стержня выполнены четырехступенчатые пазы } стреловидной формы, глубина которых плавно изменяется на длине каждой ступени и имеет максимальный лерелад на их лересечении. Внутренний конец каждого палыца 8 расположен .в соответствующем, пазу //, и Л|ри перемещении стержля отно1сительно корпуса пальцы 8 могут перемещаться по лазам только в одну сторону, например по часовой стрелке.
Захват работает следующим 01б.разом.
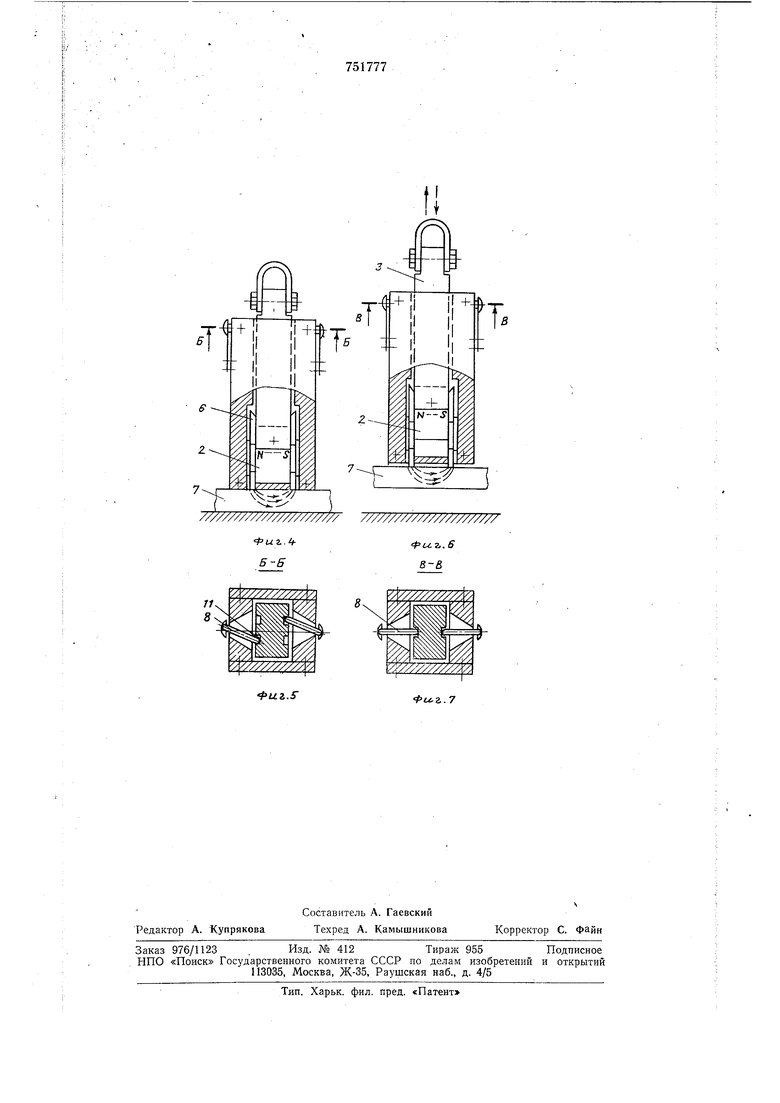
В исходном состоянии (см. фиг. 1) он подвещен окобой 4 к грузоподъемному механизму, ,при этом стержень 3 с магнитом 2 находятся в верхнем положенни, а пальцы 8 IB крайнем нижнем положении пазов //. Для захватывания Груза 7 захват опускают на него, Л|ри этом пластины 6 сместятся в пазах 6 вверх, а .магнит 2 со стержнем 3 под действием силы втягивания магцитного ПОЛЯ и собственного веса опустятся в нижнее положение (см. фиг. 4). Пальць1 8 три этом, переместятся в лазах 7/ в верхнее левое .положение. Магнитный поток замкнется через полюса магнита, пластины
6и груз ,7. При подъеме стержня 3 с магнитом 2 в лро.межуточное положение пальцы переместятся IB средние участки пазов, кор-пус ./ отделится от груза 7, пластина 6 смещается в пазах 5 шниз, удерживая груз силой магнитного поля (см. фиг. 6). .В таком положении лруз переносится в место |раз Г-рузки. Захват опускают, пластины 6 смещаются вверх, и корпус устанавливается на грузе. |Под действием собственного
веса магнит 2 со стержнем 3 переместятся вниз, а пальцы 8 переместятся в верхние правые yqaiCTKH пазов /У.
При последующем подъеме стержень с
магнитом пере местятся .вверх относительно корпуса, пальцы 5 окажутся в крайних нижних участках пазов 1.1, и захват отделится от груза. Пластины 6 сместятся в пазах 5 вниз, так ка.к произойдет размыкание
магнитного потока. Захват подготовлен к очередно.му щиклу.
После окончания работы захват следует уста.новить на подставку из ферромагнитного материала для того, чтобы замкнуть
магнитный поток и сохранить постоянный магнит от лреждеврем.енного размагничивания.
Формула изобретения
Магнитный а-втоматический захват, содержащий корпус, в котором подвижно установлен постоянный магнит, соединенный посредством пря.моугольного стержня с грузовой скобой, и механизм фиксации магнита в рабочем и нерабочем положениях, отличающийся тем, что, с целью ловыщения его грузоподъемности и упрощения .конструкции, корпус в нижней часги выполнен с пазами, в которых подвижно установлены две пластины из. магнитопроводящего материала для взаи.модействия с захватываемым изделием и магнитом, при
этом на двух боковых гранях стержня выполнены четырехступенчатые пазы переменной глубины стреловидной формы, а механизм фиксации содержит установленные в верхней части стенок корпуса с возможностью качания в горизонтальной плоскости и осевого перемещения .два подпружиненных пальца для взаимодействия с пазами стержня.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 41,3000, кл. В 66 iC 1/04,1970.
2. Авторское свидетельство СССР № €17350, кл. В 6:6 С 1/04, 1976.
тГ-
+ I luT J: ll l
i /
..iFi
fr
IB

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с кантом | 1987 |
|
SU1546405A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Автоматический магнитный захват | 1989 |
|
SU1791322A1 |
| Автоматический магнитный захват | 1976 |
|
SU617350A1 |
| УСТРОЙСТВО ДЛЯ ПОДСОЕДИНЕНИЯ И ОТСОЕДИНЕНИЯ ГРУЗА | 2004 |
|
RU2347735C2 |
| Автомат для шихтовки сердечника трансформатора | 1983 |
|
SU1275561A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
+
N-S
///////////////////////// ////////////////////////
t-PU.2..6
Б-БB-B
ы-s
