Изобретение относится к подъемно- транспортному оборудованию, именно к грузозахватным устройствам.
Цель изобретения - упрощение конструкции путем исключения привода с внешним источником энергии.
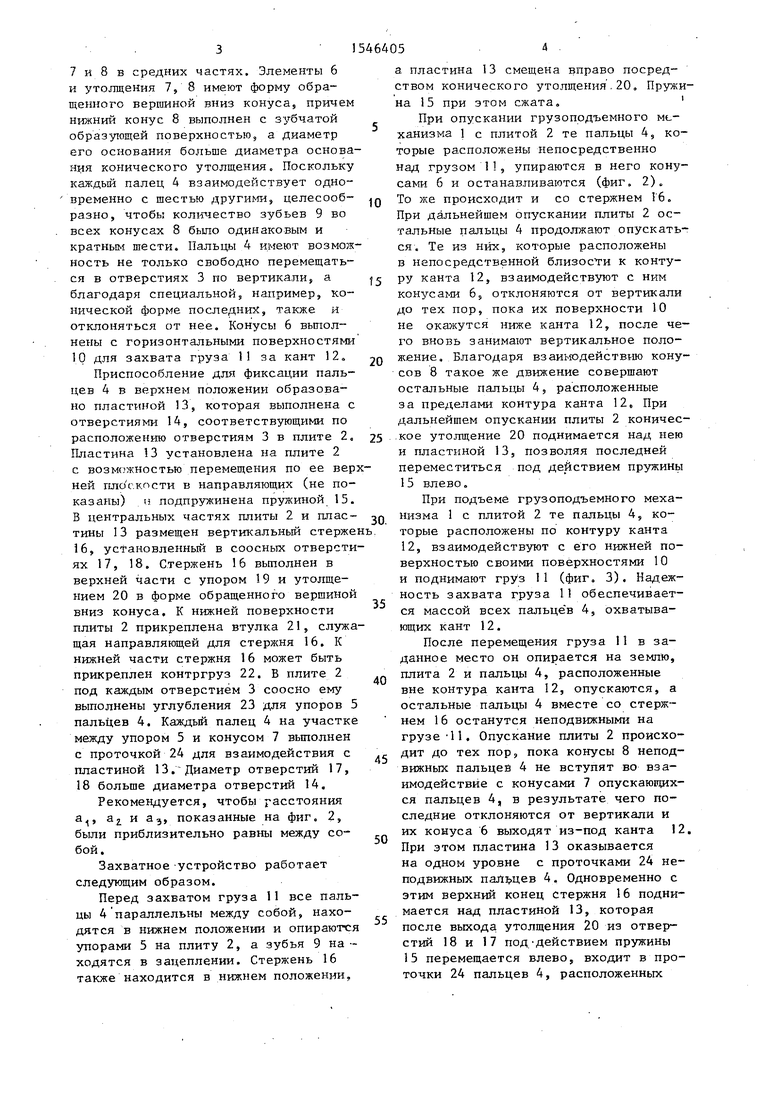
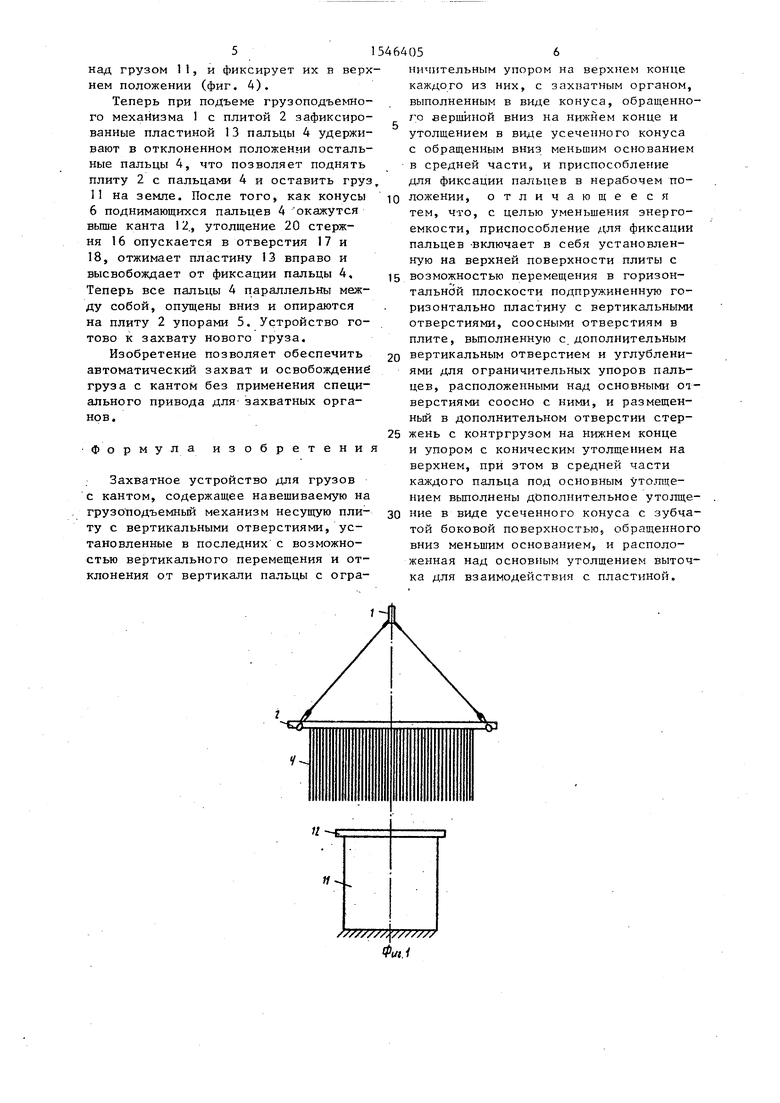
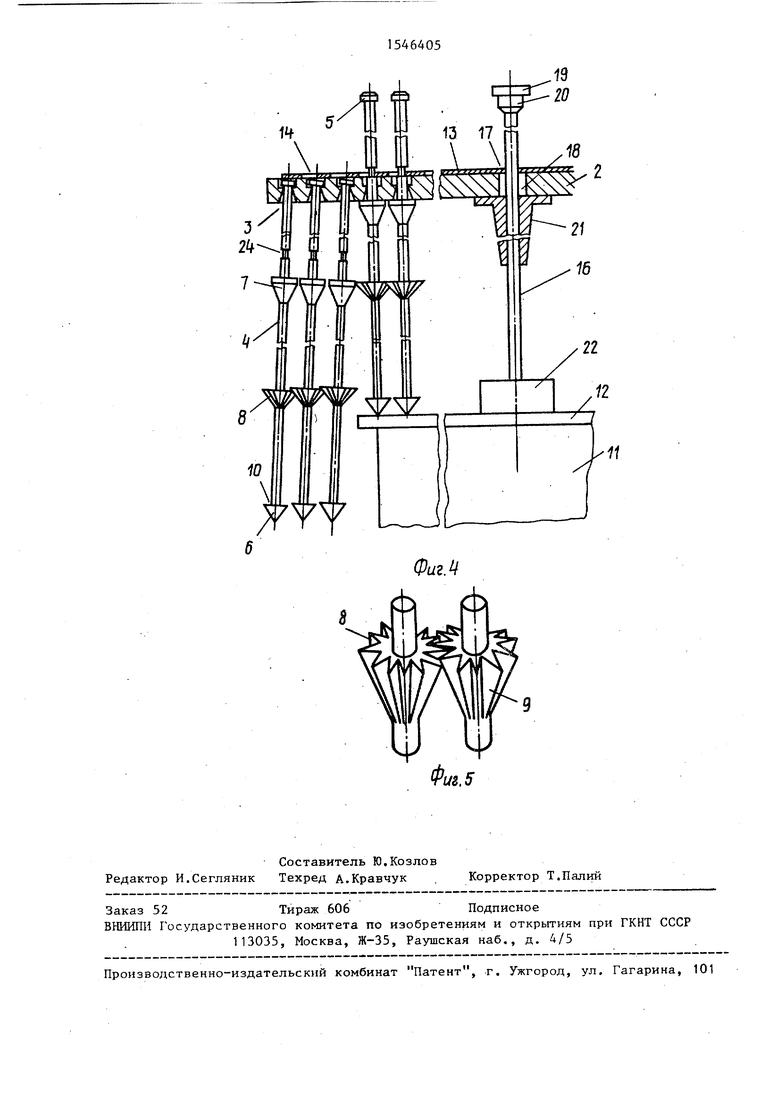
На фиг. 1 изображен общий вид устройства, вид сбоку; на фиг. 2 - фрагмент устройства перед захватом груза; на Фиг. 3 - то же, с захватным грузом; на фиг. 4 - то же, при освобождении груза; на Фиг. 5 - вэаимодействующие между собой зубчатые конусы.
Захватное устройство для грузов с кантом содержит навешиваемую на грузоподъемный механизм 1 плиту 2 с отверстиями 3, установленные в последних пальцы 4 и приспособление для их фиксации в верхнем положении. Пальцы 4 выполнены с ограничительными упорами 5 на верхних концах, захватными элементами 6 на нижних концах и с коническими утолщениями
СП
4ь О 4
О СЛ
3
7 и 8 в средних частях. Элементы 6 и утолщения 7, 8 имеют форму обращенного вершиной вниз конуса, причем нижний конус 8 выполнен с зубчатой образующей поверхностью, а диаметр его основания больше диаметра основания конического утолщения. Поскольку каждый палец 4 взаимодействует одновременно с шестью другими, целесооб
разно, чтобы количество зубьев 9 во
всех конусах 8 было одинаковым и кратным шести. Пальцы 4 имеют возможность не только свободно перемещаться в отверстиях 3 по вертикали, а благодаря специальной, например, конической форме последних, также и отклоняться от нее. Конусы 6 выполнены с горизонтальными поверхностями 10 для захвата груза 11 за кант 12.
Приспособление для фиксации пальцев 4 в верхнем положении образовано пластиной 3, которая выполнена с отверстиями 14, соответствующими по расположению отверстиям 3 в плите 2, Пластина 13 установлена на плите 2 с возможностью перемещения по ее верней гшо с кости в направляющих (не показаны) ч подпружинена пружиной 15. В центральных частях плиты 2 и плас- тины 13 размещен вертикальный стерже 16, установленный в соосных отверстиях 17, 18. Стержень 16 выполнен в верхней части с упором 19 и утолщением 20 в форме обращенного вершиной вниз конуса, К нижней поверхности плиты 2 прикреплена втулка 21} служащая направляющей для стержня 16. К нижней части стержня 16 может быть прикреплен контргруз 22. Б плите 2 под каждым отверстием 3 соосно ему выполнены углубления 23 для упоров 5 пальцев 4. Каждый палец 4 на участке между упором 5 и конусом 7 выполнен с проточкой 24 для взаимодействия с пластиной 13.-Диаметр отверстий 17, 18 больше диаметра отверстий 14,
Рекомендуется, чтобы расстояния а, аг и аэ, показанные на фиг. 2, были приблизительно равны между собой.
Захватное устройство работает следующим образом.
Перед захватом груза 11 все пальцы 4 параллельны между собой, находятся в нижнем положении и опираются упорами 5 на плиту 2, а зубья 9 на - ходятся в зацеплении. Стержень 16 также находится в нижнем положении,
а пластина 13 смещена вправо посредством конического утолщения 20, Пружина 15 при этом сжата. При опускании грузоподъемного механизма 1 с плитой 2 те пальцы 49 ко5
0
5
0
35
40
45
50
55
торые расположены непосредственно над грузом 1, упираются в него конусами 6 и останавливаются (фиг. 2). То же происходит и со стержнем 16. При дальнейшем опускании плиты 2 остальные пальцы 4 продолжают опускаться. Те из нихэ которые расположены в непосредственной близости к контуру канта 12, взаимодействуют с ним конусами 6s отклоняются от вертикали до тех пор, пока их поверхности 10 не окажутся ниже канта 12, после чего вновь занимают вертикальное положение. Благодаря взаимодействию конусов 8 такое же движение совершают остальные пальцы 4, расположенные за пределами контура канта 12„ При дальнейшем опускании плиты 2 коническое утолщение 20 поднимается над нею и пластиной 13, позволяя последней переместиться под действием пружины 15 влево.
При подъеме грузоподъемного механизма 1 с плитой 2 те пальцы 4, которые расположены по контуру канта 12, взаимодействуют с его нижней поверхностью своими поверхностями 10 и поднимают груз 11 (фиг. 3). Надежность захвата груза 11 обеспечивается массой всех пальце в 4, охватывающих кант 12.
После перемещения груза 11 в заданное место он опирается на землю, плита 2 и пальцы 4, расположенные вне контура канта 12, опускаются, а остальные пальцы 4 вместе со стержнем 16 останутся неподвижными на грузе . Опускание плиты 2 происходит до тех пор, пока конусы 8 неподвижных пальцев 4 не вступят во взаимодействие с конусами 7 опускающихся пальцев 4, в результате чего последние отклоняются от вертикали и их конуса 6 выходят из-под канта 12. При этом пластина 13 оказывается на одном уровне с проточками 24 неподвижных пальцев 4. Одновременно с этим верхний конец стержня 16 поднимается над пластиной 13, которая после выхода утолщения 20 из отверстий 18 и 17 под-действием пружины 15 перемещается влево, входит в проточки 24 пальцев 4, расположенных
щ гъ 5
П 19 20ft
is ff Фм.2
ii
Фиг.З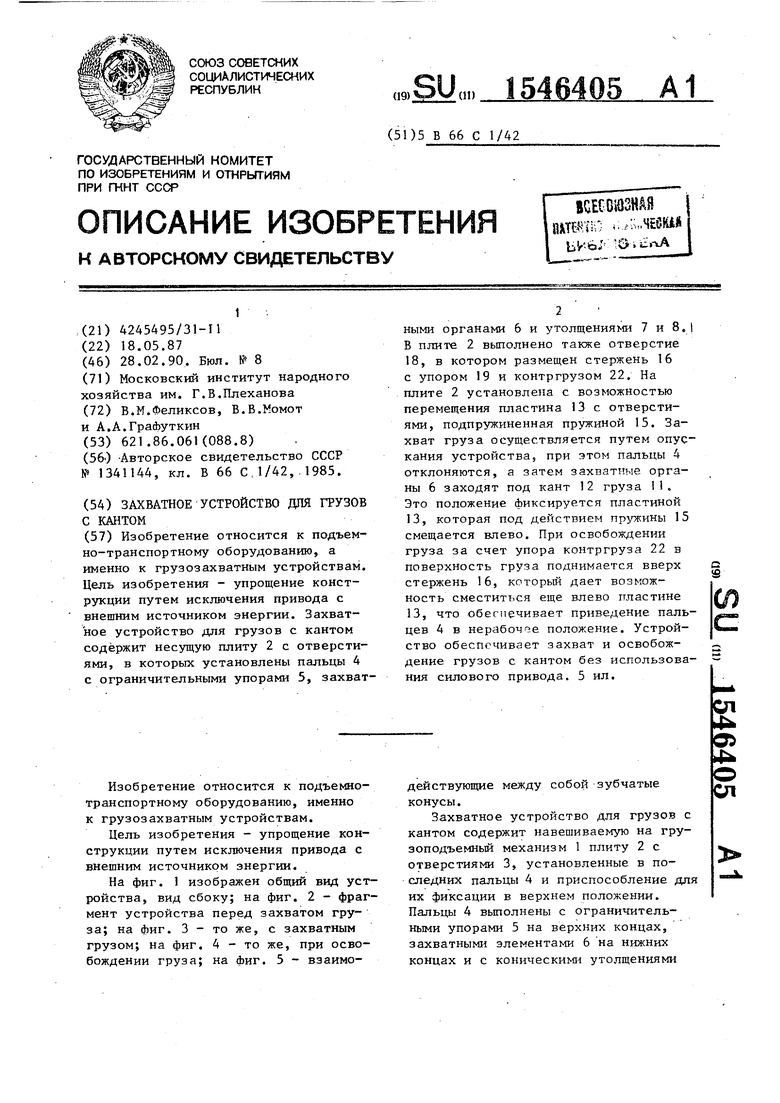
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с кантом | 1985 |
|
SU1341144A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Устройство для поштучной подачи заготовок в зону обработки | 1988 |
|
SU1581441A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1972 |
|
SU350740A1 |
| Клещевой захват | 1982 |
|
SU1008137A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Захватное устройство для грузов сошТыРЕМ и фигуРНОй гОлОВКОй | 1979 |
|
SU816935A1 |
| Грузозахватное устройство | 1987 |
|
SU1418028A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к грузозахватным устройствам. Цель изобретения - упрощение конструкции путем исключения привода с внешним источником энергии. Захватное устройство для грузов с кантом содержит несущую плиту 2 с отверстиями, в которых установлены пальцы 4 с ограничительными упорами 5, захватными органами 6 и утолщениями 7 и 8. В плите 2 выполнено также отверстие 18, в котором размещен стержень 16 с упором 19 и контргрузом 22. На плите 2 установлена с возможностью перемещения пластина 13 с отверстиями, подпружиненная пружиной 15. Захват груза осуществляется путем опускания устройства, при этом пальцы 4 отклоняются, а затем захватные органы 6 заходят под кант 12 груза 11. Это положение фиксируется пластиной 13, которая под действием пружины 15 смещается влево. При освобождении груза за счет упора контргруза 22 в поверхность груза поднимается вверх стержень 16, который дает возможность сместиться еще влево пластине 13, что обеспечивает приведение пальцев 4 в нерабочее положение. Устройство обеспечивает захват и освобождение грузов с кантом без использования силового привода.
ФагМ
| Захватное устройство для грузов с кантом | 1985 |
|
SU1341144A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
