t
Изобретение относится к сонтролирующим устройствам, в частности к устройствс м для контроля занятости ячейки стеллажного склада.
Изв.естно устройство для контроля занятости ячейки, смонтированное на имеющем подвижные и неподвижные платформы, телескопическом грузоз а.-вате подъемно-тракспортнсй мелпт ;ы., содержащее рычаг, закрепленный на одной из платформ х рузозахвата ij , Это устройство имеет сложную конструкцию..
Известно также устройстве для контроля занятости ячейки, смонтированное на имеклцем подвижные и неподвижную платформы, телескопическом грузозахвате подъемно-транспортной машины, содержащее рычаг, закрепленный на одной из платформ грузозахвата и взаимодействующий с концевым выключателем, смонтированным не неподвижной платформе грузозахвата 2j .
Это устройство имеющее более простую конструкцию, не позволяет С1днако. проконтролировать наличие изделия в ячейке при разгрузке стеллажа,т.в. грузозахват срабатывает и s том случае, когда ячейка незагружена.
Цель изобретения - повышение надежности подъемно-транспортной машины в работе за счет обеспечения контроля наличия.изделия в,ячейке при разгрузке.
Это достигается тем, что рычаг выполнен двуплечим и закре.плен на неподвижной платформе грузозахвата с возможностью поворота вокруг горизон10тальной оси, при этом ось рычага через зубчато-реечный механизм связана с злектромагннтом.
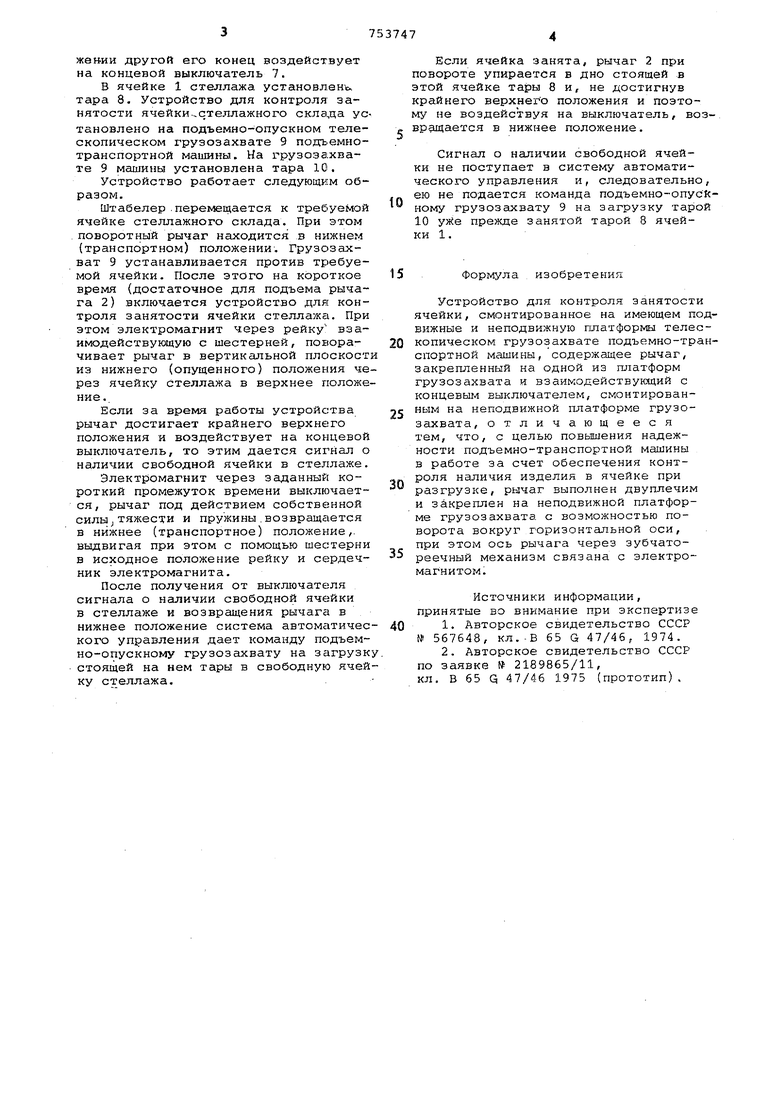
На фиг. 1 показано предлагаемое устройство, сигнализирующее о наличии тары в ячейке; на.фиг. 2 - вид
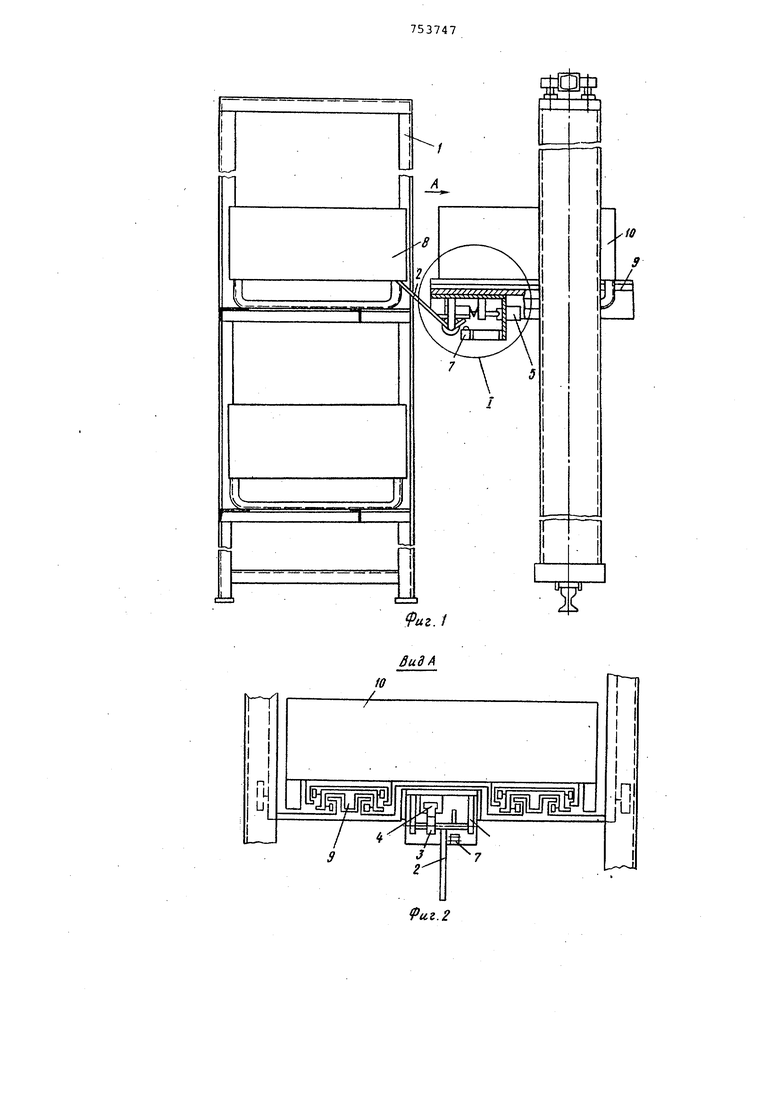
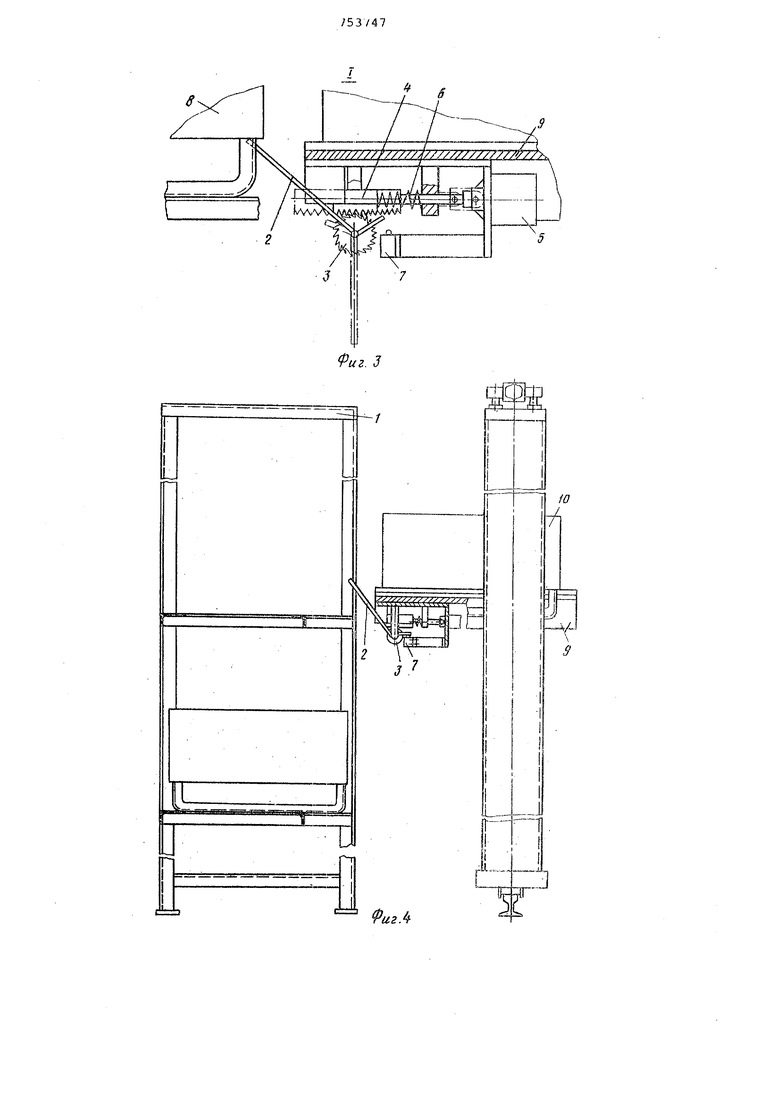
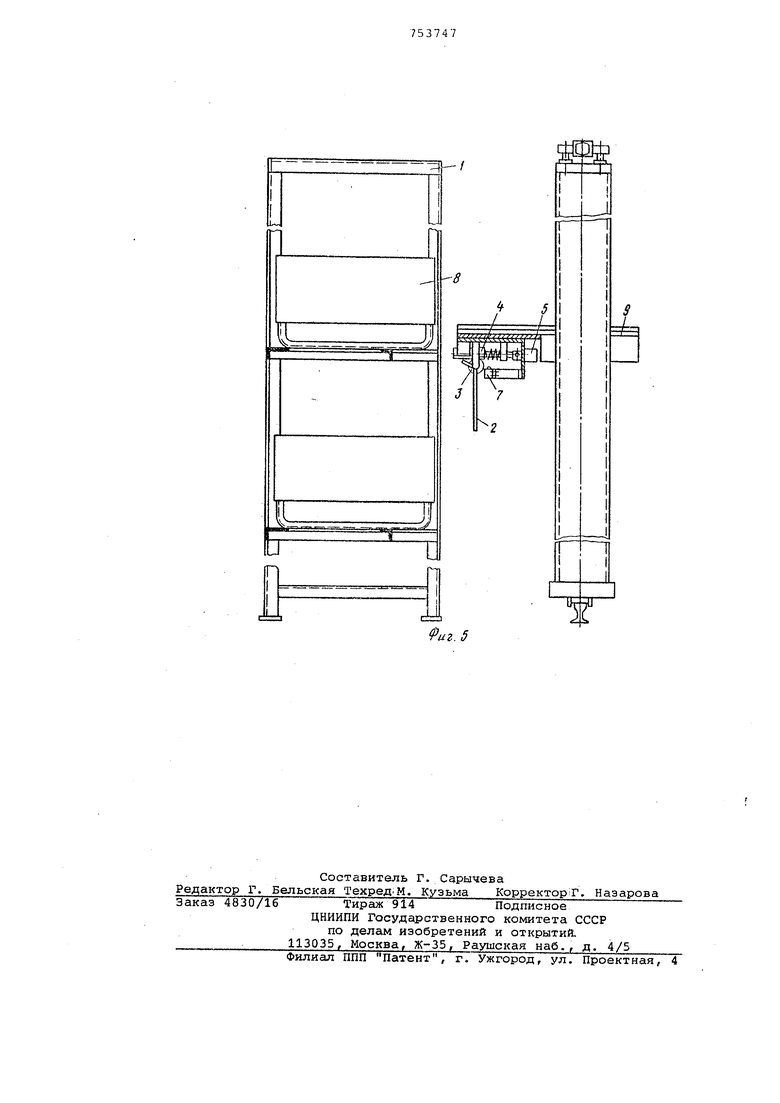
15 А фиг. 1; на фиг, 3 - узел I фиг. 1) на фиг, 4 - устройство, сигнализируюдее о свободной ячейке стеллажаf на фиг. 5 - то же,- в транспортном
20 положении.
Устройство содержит поворотный в вертикальной rmocKoqivi через ячейку 1 стеллажа рычаг 2, на одной оси с
25 которым находится шестерня 3, взаимодействующая с рейкой 4. Рейка 4 имеет возможность поступательного перемещения от электромагнита 5 и пружины 6. При нахождении одного конца рычага 2 в крайнем верхнем положвнии другой его конец воздействует на концевой выключатель 7.
В ячейке 1 стеллажа установлен тара 8, Устройство для контроля занятости ячейки.стеллажного склада установлено на подъемно-опускном телескопическом грузозахвате 9 подъ.емнотранспортной машины. На х-рузозахвате 9 машины установлена тара IQ,
Устройство работает следующим образом.
Штабелер .перемещается к требуемой ячейке стеллажного склада. При этом поворотный рычаг находится в нижнем (транспортном) положении. Грузозахват 9 устанавливается против требуемой ячейки. После этого на короткое время (достаточное для подъема рычага 2) включается устройство для контроля заня:тости ячейки стеллажа. При этом электромагнит через рейку взаимодействующую с шестерней, поворачивает рычаг в вертикальной плоскост из нижнего (опущенного) положения через ячейку стеллажа в верхнее положение..
Если за время работы устройства рычаг достигает крайнего верхнего положения и воздействует на концевой выключатель, то этим дается сигнал о наличии свободной ячейки в стеллаже.
Электромагнит через заданный короткий промежуток времени выключается, рычаг под действием собственной cильI тяжести и пружины .возвращсштся в нижнее (транспортное) положение,, выдвигая при этом с помощью шестерни в исходное положение рейку и сердечник электромагнита.
Посла получения от выключате;ля сигнала о наличии свободной ячейки в стеллаже и возвращения рычага в нижнее положение система автомсхтичесКО1ХЭ управления дает команду подъемно-опускному грузозахвату на загрузк стоящей на нем тары в свободную ячейку стеллажа.
Если ячейка занята, рычаг 2 при повороте упирается в дно стоящей в этой ячейке тары 8 и, не достигнув крайнего верхнего положения и поэтому не воздействуя на выключатель, возвращается в нижнее положение.
Сигнал о наличии свободной ячейки не поступает в систему автоматического управления и, следовательно, ею не подается команда подъемно-опусКному грузозахвату 9 на загрузку тарой 10 yjSe прежде занятой тарой 8 ячейки 1.
Формула изобретения
Устройство Д.ПЯ контроля занятости ячейки, смонтированное на имеющем подвижные и неподвижную платформы телескопическом грузозахвате подъемно-транспортной машины, содержащее рычаг, закрепленный на одной из платформ грузозахвата и взаимодействующий с концевым выключателем, смонтированным на неподвижной платформе грузозахвата, отличающееся тем, что, с целью повышения надежности подъемно-транспортной машины в работе за счет обеспечения контроля наличия изделия в ячейке при разгрузке, рычаг выполнен двуплечим и закреплен на неподвижной платформе грузозахвата с возможностью поворота вокруг горизонтальной оси, при этом ось рычага через зубчато5 реечный механизм связана с электромагнитом.
Источники информации, принятые во внимание при экспертизе 0 Авторское свидетельство СССР № 567648, кл.-В 65 Q 47/46f 1974.
2. Авторское свидетельство СССР по заявке № 2189865/11, кл, В 65 Q 47/46 1975 (прототип),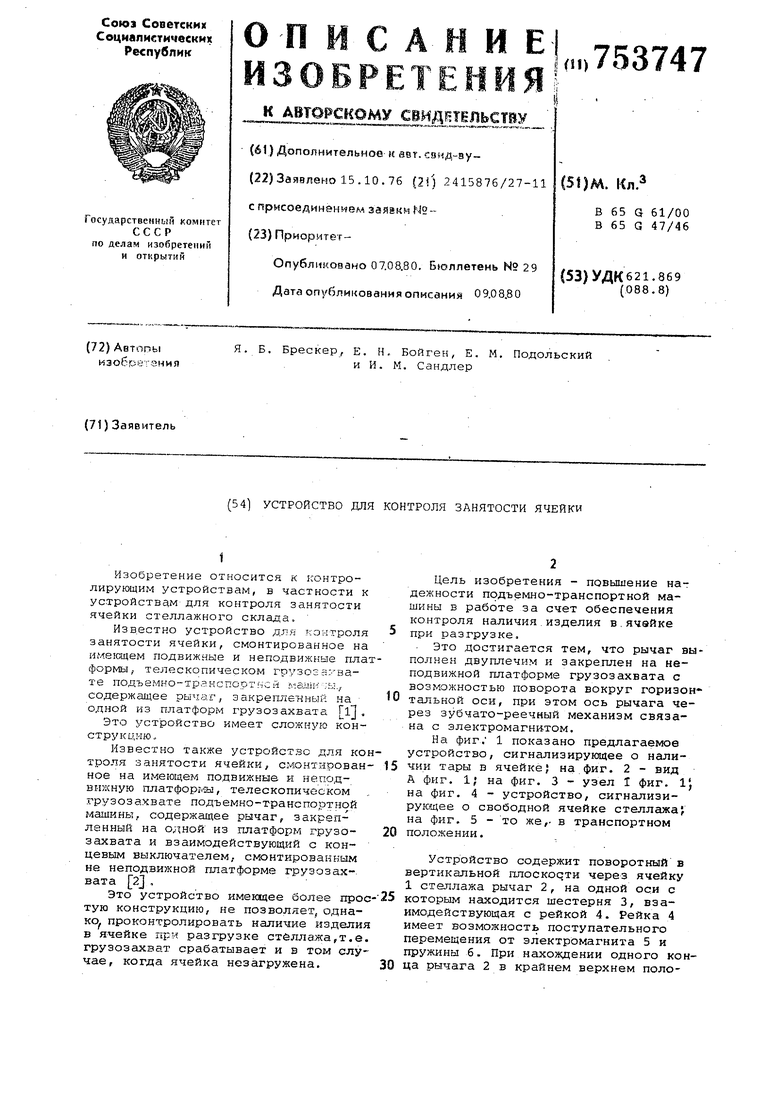
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля занятостиячЕйКи | 1979 |
|
SU852728A1 |
| Грузозахват для стеллажного крана-штабелера | 1980 |
|
SU874600A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
Риг. 2
8
J
11
-тшг игА
.
IL
E
