Изобретение относится к промышленному транспорту, в частности к устройствам для управления приводами телескопических захватов стеллажных кранов-штабелеров и может быть использовано в различных отраслях промышленности на автоматизированных складах.
Известно устройство для управления приводом телескопического захвата стеллажр ого крана-штабелера, содержащее установленные на грузонесущей платформе штоки, связанные между собой и посредством трособлочной системы с подпружиненным ползуном, на концах с противоположных сторон грузонесуш,ей платформы закреплены ограничители перемеш,ения платформ захвата при наезде на препятствие, конечный выключатель, включенный в цепь управления приводом и взаимодействующим с ползуном {1 .
Указанное устройство не -позволяет убирать ограничители штоков в габарит захвата, что снижает удобство его эксплуатации, так как в случае неточной установки груза в ячейки стеллажа повышает возможность аварийной ситуации.
Известно устройство для управления приводом телескопического захвата стеллажного крана-штабелёра, содержащее связанные между собой и с грузонесущей платформой горизонтально расположенные щтоки, на одних концах которых с противоположных сторон грузонесущей платформы закреплены ограничительные упоры, смонтированные на неподвижной платформе подпружиненный ползун, связанный трособлочной системой с вторым концом одного из штоков, и конечный выключатель, взаимодействующий с ползуном и включенный в цепь управления приводом захвата, и механизм фиксации щтоков в исходном положении 2.
Недостатком известного устройства является низкая надежность из-за того, что подпружиненные упоры механизма фиксации, совершающие движения, перпендикулярные воздействующей на них силы, подвергаются повышенному износу, что снижает надежность фиксации штоков.
Цель изобретения - повыщение надежности.
Поставленная цель достигается тем, что в устройстве для управления приводом телескопического захвата стеллажного кранаштабелера, содержащем связанные между собой и с грузонесущей платформой горизонтально расположенные штоки, на одних концах которых с противоположных сторон грузонесущей платформы закреплены ограничительные упоры, смонтированные на неподвижной платформе подпружиненный ползун, связанный трособлочной системой с другим концом одного из штоков, и конечный выключатель, взаимодействующий с ползуном и включенный в цепь управления
приводом захвата, и механизм фиксации штоков в исходном положении, щтоки связаны между собой гибким тяговым органом, прикрепленным одним и другим концами соответственно к второму концу другого щтока и к одному из элементов трособлочной системы Б; зоне грузонесущей платформы, а механизм фиксации штоков содержит смонтированные в средней части грузонесущей платформы поворотный в вертикальной плоскости кронштейн с блоком на одном конце, размещенным под гибким тяговым органом, блоки, размещенные над гибким тяговым органом и поворотным кронштейном и смещенные по горизонтали в против воположные стороны от блока, закрепленного на кронштейне, ограничитель поворота кронштейна и установленную на неподвижной платформе пластину с прЬфильной торцовой поверхностью для взаимодействия с блоком, закрепленным на кронштейне.
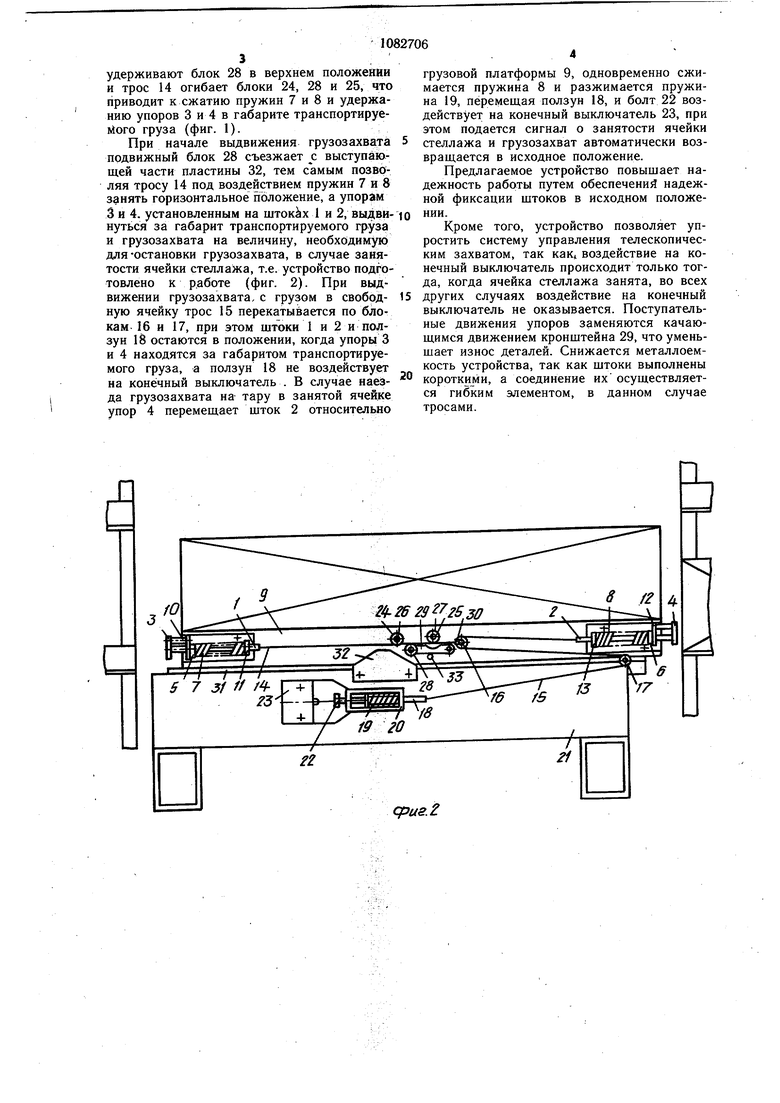
На фиг. 1 показано устройство, находящееся в среднем (нейтральном) положении, общий вид; на фиг. 2 - устройство в момент подготовки К срабатыванию, общий вид; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - разрез А-А на фиг. 3.
Устройство содержит шток I и 2 с ограничительными упорами 3 и 4. Через упорные шайбы 5 и 6 на штоки 1 и 2 воздействуют пружины 7 и 8. Штоки 1 и 2 установлены на грузонесушей платформе 9 телескопического захвата крана-щтабелера с возможностью перемещения в направляющих 10-13. Штоки 1 и 2 связаны гибким тяговым органом тросом 14. и 15 трособлочной системы при помощи блоков 16 и 17. Штоки 1 и 2 связаны также с ползуном 18, на который воздействует пружина 19. Ползун 18 установлен в горизонтальных направляющих 20, закрепленных на неподвижной платформе 21., Ползун 18 снабжен болтами 22, которые в случае наезда на тару в занятой ячейке воздействуют на конечный выключатель 23. Трос 14 в исходном положении телескопического захвата огибает блоки 24 и 25, установленные на осях 26 и 27, на грузонесущей платформе 9, и подвижный блок 28, установленный на кронщтейне 29, который качается на оси 30, закрепленной также на грузовой платформе 9.
Блок 17 установлен на средней платформе 31 телескопического захвата. Блок 16 удерживается тросами 14 и 15, Подвижный блок 28 взаимодействует о пластиной 32, закрепленный на неподвижной платформе 21 и имеющей выступающую часть и заходные плоскости. Штифт 33 удерживает кронштейн 29 .в горизонтальном положении после схода подвижного блока 28 с пластины 32.
Устройство работает следующим образом.
Штоки 1 и 2 при исходном положении грузонесущей платформы 9 и средней платформы 31 выступающей частью пластины 32 удерживают блок 28 в верхнем положении и трос 14 огибает блоки 24, 28 и 25, что приводит к сжатию пружип 7 и 8 и удержанию упоров 3 и 4 в габарите транспортируемого груза (фиг. 1). При начале выдвижения грузозахвата подвижный блок 28 съезжает с выступающей части пластины 32, тем самым позволяя тросу 14 под воздействием пружин 7 и 8 занять горизонтальное положение, а упорам 3 и 4. установленным на штокЬх 1 и 2, выдвинуться за габарит транспортируемого груза и грузозахвата на величину, необходимую для-остановки грузозахвата, в случае занятости ячейки стеллажа, т.е. устройство подготовлено к работе (фиг. 2). При выдвижеиии грузозахвата, с грузом в свободную ячейку трос 15 перекатывается по блокам 16 и 17, при этом штоки 1 и 2 и ползун 18 остаются в положении, когда упоры 3 и 4 находятся за габаритом транспортируемого груза, а ползун 18 не воздействует на конечный выключатель . В случае наезда грузозахвата на тару в занятой ячейке упор 4 перемещает щток 2 относительно грузовой платформы 9, одновременно сжимается пружина 8 и разжимается пружина 19, перемещая ползун 18, и болт 22 воздействует на конечный выключатель 23, при этом подается сигнал о занятости ячейки стеллажа и грузозахват автоматически возвращается в исходное положение. Предлагаемое устройство повышает надежность работы путем обеспечений надежной фиксации щтоков в исходном положе ии. Кроме того, устройство позволяет упростить систему управления телескопическим захватом, так как1 воздействие на конечный выключатель происходит только тогда, когда ячейка стеллажа занята, во всех других случаях воздействие на конечный выключатель не оказывается. Поступательные движения упоров заменяются качающимся движением кронщтейна 29, что уменьшает износ деталей. Снижается металлоемкость устройства, так как штоки выполнены короткими, а соединение их осуществляется гибким элементом, в данном случае тросами.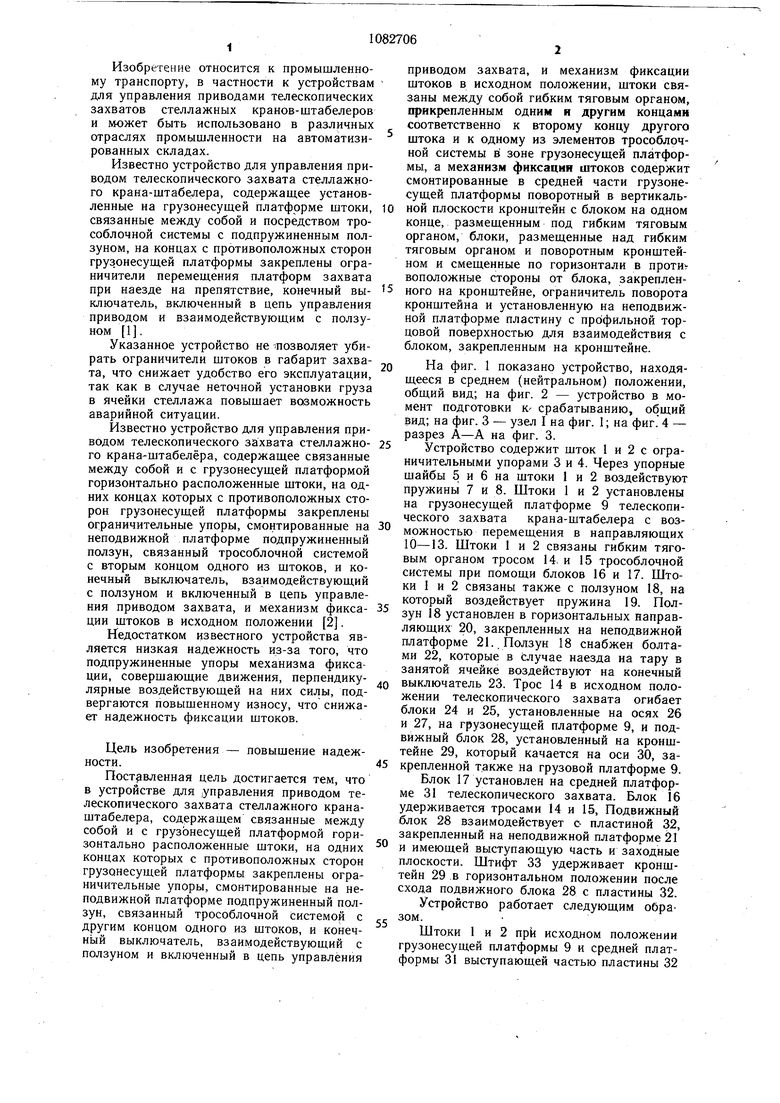
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ ТЕЛЕСКОПИЧЕСКОГО ЗАХВАТА СТЕЛЛАЖНОГО КРАНА-ШТАБЕЛЕРА, содержащее связанные между собой и с грузонесущей платформой горизонтально расположенные штоки, на одних концах которых с противоположных сторон грузонесущей платформы закреплены ограничительные упоры, .смонтированные на неподвижной платформе подпружиненный ползун, связанный трособлочной системой с другим концом одного из штоков, и конечный выключатель, взаимодействующий с ползуном и включенный в цепь управления приводом захвата, и механизм фиксации щтоков в исходном положении, отличающееся тем, что, с целью повышения надежности, штоки связаны между собой гибким тяговым органом, прикрепленным одним и другим концами соответственно к второму концу другого штока и к одному из элементов трособлочной системы в зоне грузонесущей платформы, а механизм фиксации штоков содержит смонтированный в средней части грузонесущей платформы поворотный в вертикальной плоскости кронштейн с блоком на одном конце, размещенным под гибким теговым органом, блоки, размещенные над гибким с В тяговым органом и поворотным кронштейном и смещенные по горизонтали в п| отивопо(Л ложные стороны от блока, закрепленного на кронштейне, ограничитель поворота кронштейна и установленную на неподвижной платформе пластину с профильной торцовой поверхностью для взаимодействия с блоком, закрепленным на кронштейне. 00 ю о 05
Л
i
A.I
/42827
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля занятостиячЕйКи | 1979 |
|
SU852728A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3427843/27-11, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
