рейкой 1 посредством регулировочного болта 20.
Устройство работает следующим образом.
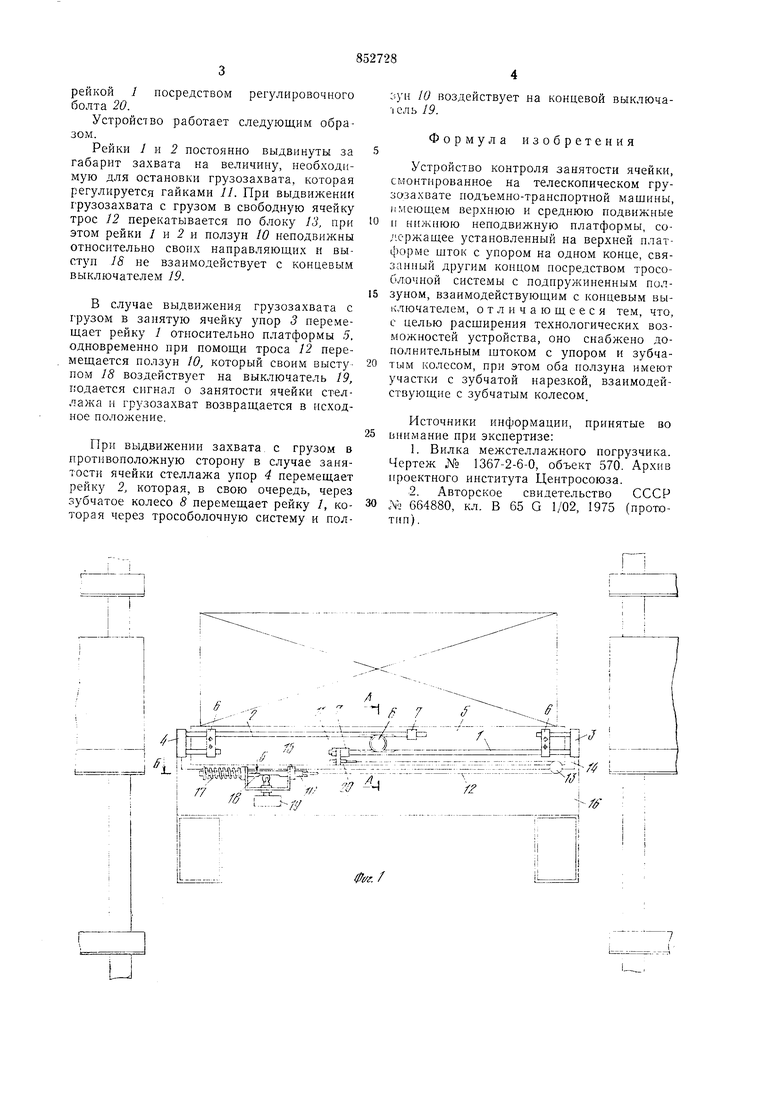
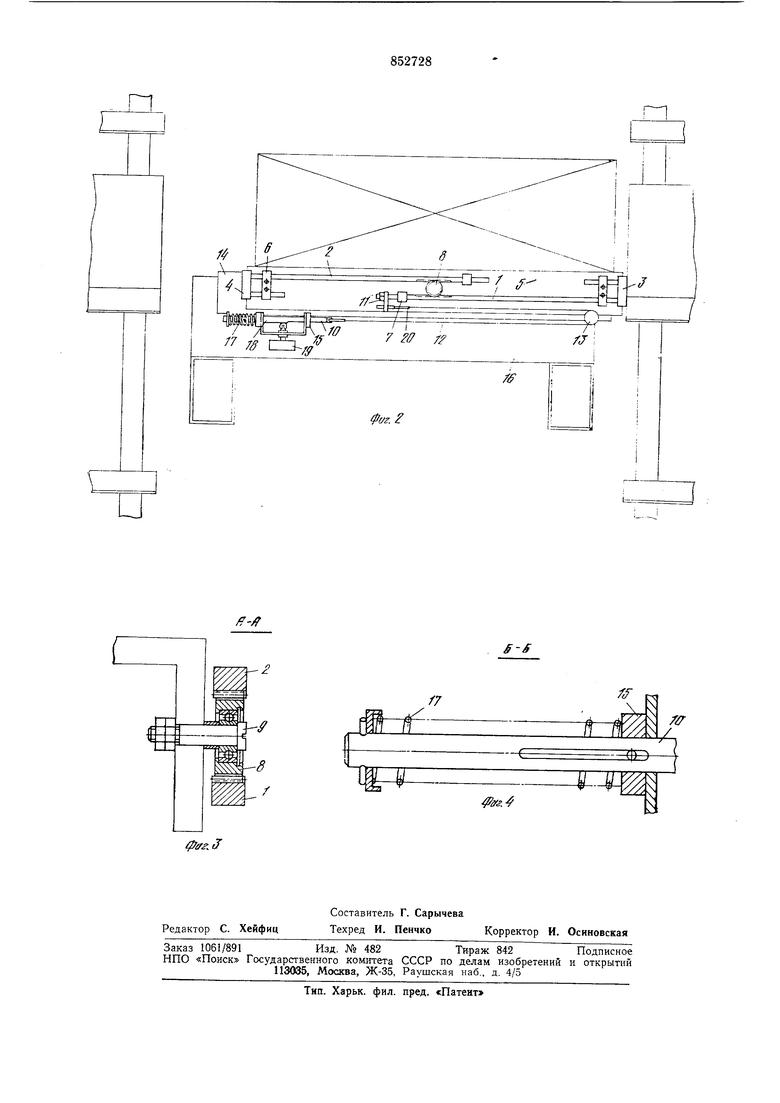
Рейки 1 и 2 постоянно выдвинуты за габарит захвата на величину, необходимую для остановки грузозахвата, которая регулируется гайками //. При выдвижении грузозахвата с грузом в свободную ячейку трос 12 перекатывается но блоку 13, при этом рейки 7 и 2 и ползун 10 неподвижны относительно своих нанравляющих и выступ IS не взаимодействует с концевым выключателем 19.
В случае выдвижения грузозахвата с грузом в занятую ячейку упор 3 перемещает рейку 1 относительно платформы 5. одновременно при помощи троса 12 перемещается ползун 10, который своим выступом 18 воздействует на выключатель 19, подается сигнал о занятости ячейки стеллажа и грузозахват возвращается в исходное положение.
При выдвижении захвата, с грузом в противоположную сторону в случае занятости ячейки стеллажа упор 4 перемещает рейку 2, которая, в свою очередь, через зубчатое колесо 8 перемещает рейку /, которая через трособолочную систему и ползун 10 воздействует на концевой выключаюль 19.
Формула изобретения
Устройство контроля занятости ячейки, смонтированное на телескопическом грузазахвате подъемно-транспортной машины, имеющем верхнюю и среднюю подвижные
н нижнюю неподвижную платформы, со/.ержащее установленный на верхней платформе шток с упором на одном конце, связанный другим концом посредством трособяочной системы с поднружиненным ползуном, взаимодействующим с концевым выключателем, отличающееся тем, что, с целью расширения технологических воз.можностей устройства, оно снабжено дополнительным штоком с упором и зубчатым колесом, при этом оба нолзуна имеют участки с зубчатой нарезкой, взаимодействующие с зубчатым колесом.
Источники информации, принятые во внимание нри экспертизе:
1.Вилка межстеллажного погрузчика. Чертеж № 1367-2-6-0, объект 570. Ар.хив проектного института Центросоюза.
2.Авторское свидетельство СССР .NO 664880, кл. В 65 G 1/02, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство контроля занятости ячейки | 1976 |
|
SU753747A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
L...i,
- - - 7
г±г-.:.
i- I - -g v ft lteferf S-- ///
/7
fff
/
1
-J
/,
//
. /
n
SS
,
