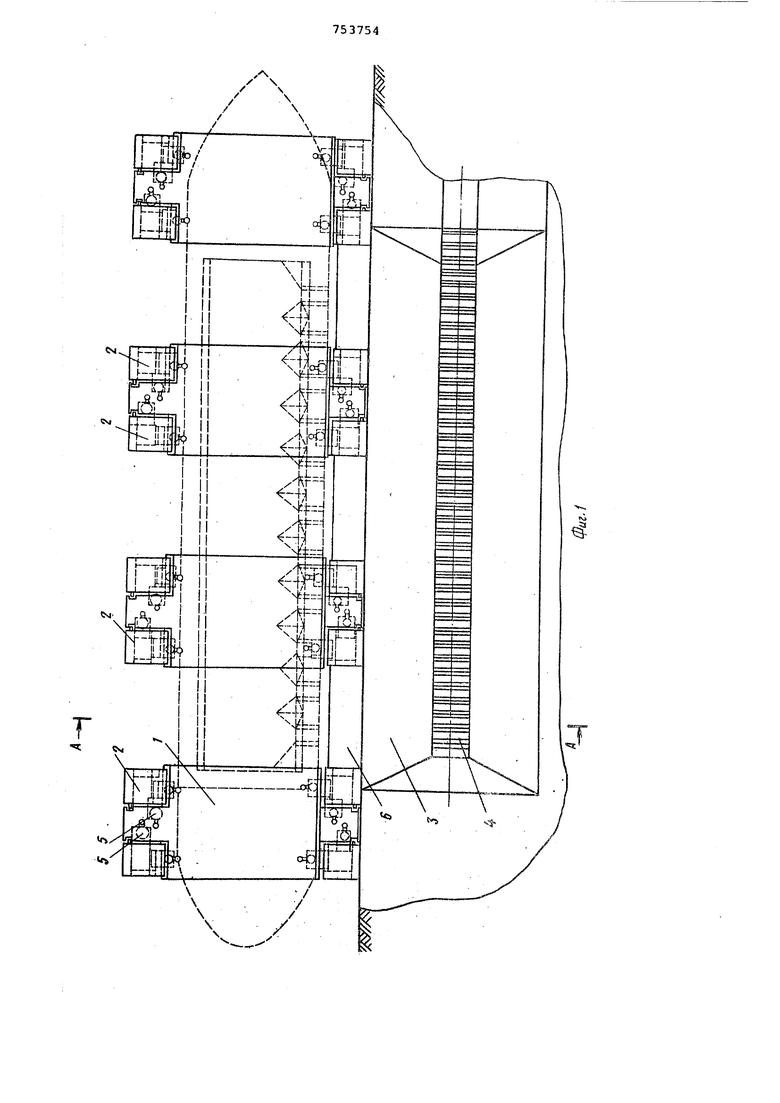
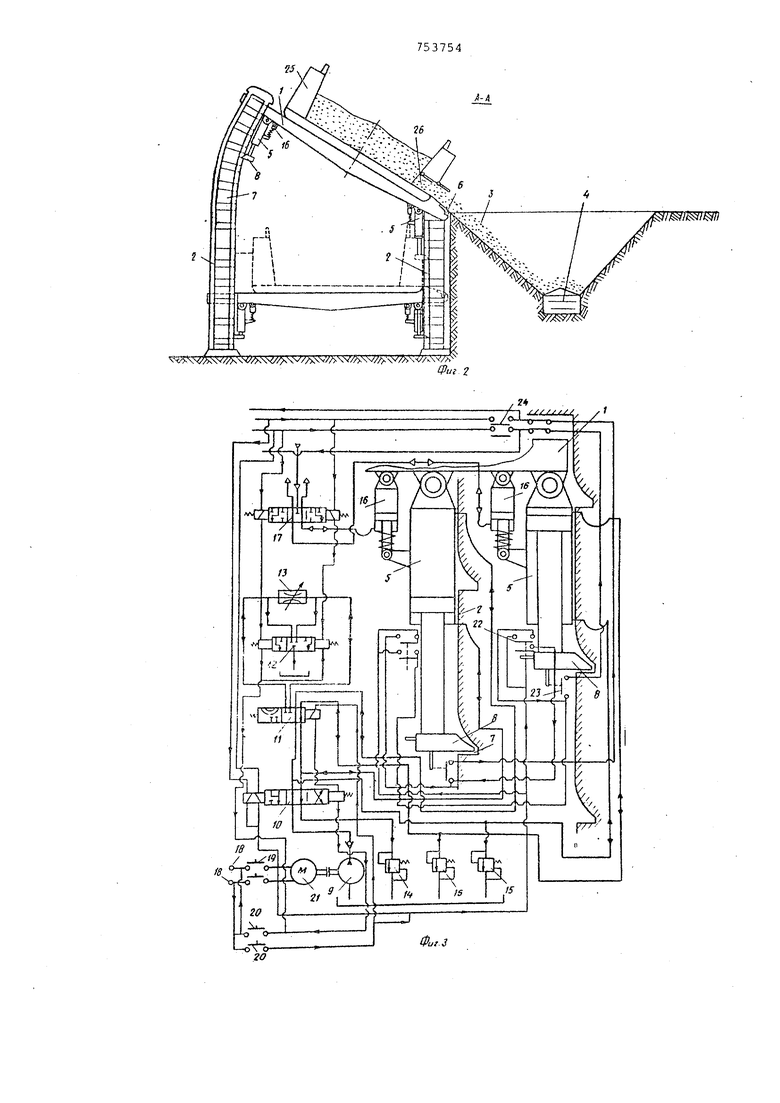
щими короткоходовыми гилродомкратами 5,а опорные колонны ,сопряженные с бункером 3 , - ограничителем 6 подъема. Верхние части опорных колон 2, расположенньрг напротив опорны колонн, сопряженных с приемным бункером 3, изогнуты в сторону приемного бункера 3 по радиусу, paBHOf/iy ширине судоподъемных платформ 1. На колоннах 2 по всей их высоте устроены опорные площадки 7 для упорбв 8 гйдродомкратов 5. Работа гидродом кратов 5 обеспечивается гидропневмоэл:ектрической системой, состоящей ИЗ: силовой гидросистемы , включающей насос 9, гидрораспределители 10, 11 и ;12, дроссель 13, которые соединены системой трубопроводов с рабочими гидроцилиндрами. Трубопроводы снабжены предохранительных ли клапанами 14 и 15, рассчитанными на минимальное и максимальное давление рабочей жидкости. Управляющая пневма-тийеская система состоит из управляющих пневматических цилиндров 16 с возвратными пружинами, воздухораспределителя 17 и соединяющих их трубопроводов. Электрическая управляющая система получает питание от сети
18и состоит из пускателей подъема
19и спуска 20, электродвигателя 21, датчиков 22 окончания хода гидродомкратов с контактами для управляющих цепей подъема и спуска,датчиков 23 контроля зацеплений гидродомкратов с опорной колонной, концевого выключа.тля 24 с двумя парами постоянно замкнутых и постоянно разомкнутых контактов, а также управляющих электромагнитов гидро- и пневмораспределителей.
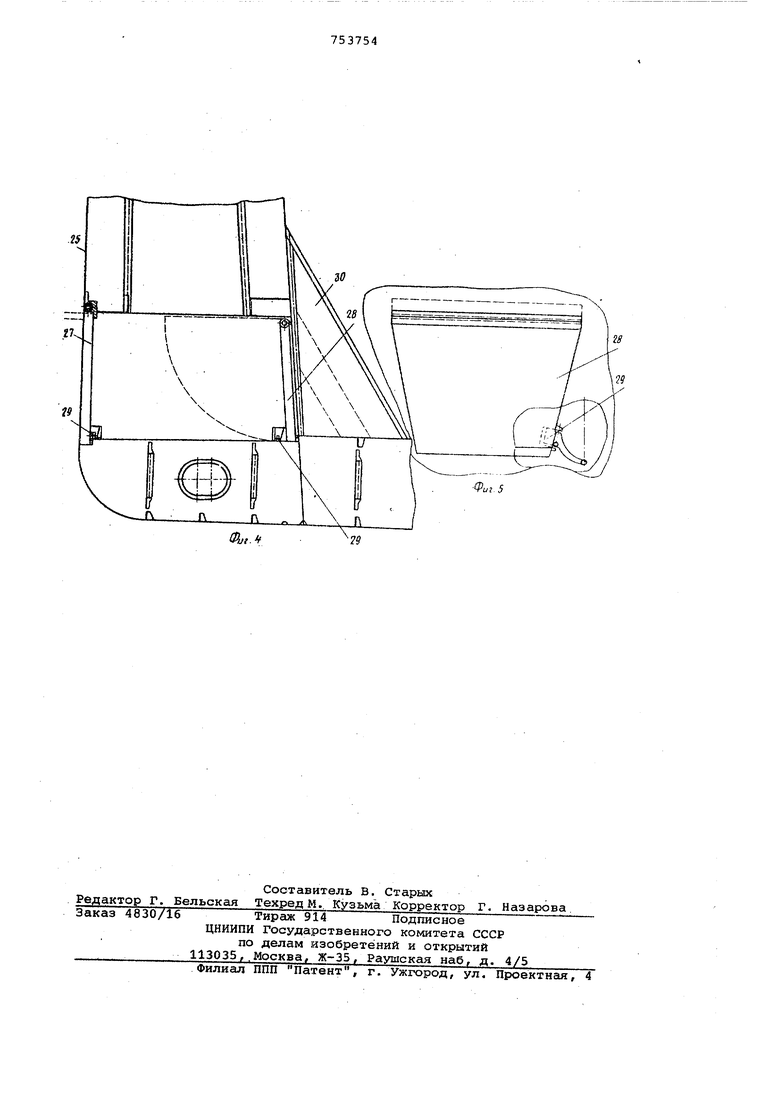
Трюмные суда 25 оборудуются ладпортами на уровне второго дна, образов.анными бортовым отверстием 26 со сплошными стенками, наружными бортовыми створками 27, внутренними бортовыми створками 28 и клиновыми замками 29. Для обеспечения возможности разгрузки судов, перевозящих навалочные грузы без остатков, они снабжены рассекателями 30.
Устройство работает следуюцим образом.
Груженое судно 25 заводится над супоподъемными платформами так,что: его грузовые трюмы совпадают с приемным бункером 3 и поджимается равномерно к береговым опорным колоннам 2. Опер&тор перегрузочного устройства,, убедившись что судно в судоподъемных платформах ошвартовано правильно, предупреждает команду и включает .пускатель подъема 19, который подает питание на электродвигс тель 21 насоса 9 и цепи управления датчиков 22 и 23 и выключателя 24. При этом рабочая жидкость от насоса 9 через гидрораспределители 10 и 11 поступает одновременно в верхнюю полость левого гидродомкрата 5 и в нижнюю полость правого гидродомкрата Под действием гидродомкратов 5 с повышенным давлением в верхней полости судоподъемные платформы 1 начинают двигаться по колоинш. 2 вверх и соприкасаются днищем судна 25, Судно равномерно опирается на все платформы и поднимается вместе с судоподъемными плaтфopмa tи 1 до тех пор пока не кончится ход, работающих гидродомкратов 5 . Гидродо2у1краты 5 , давление к которым подводится в яижнюю полость,в это время ненагружень, и подтягивают поршень в верхнее крайнее положение,а возвратная пружина уравляющего цилиндра 16 прижимает его к опорной колонне 2 до тех пор, пока упор 8 .гидродомкрата не войдет в выемку опорной ш-.ощэдки 1. При этом датчики 22 и 23 замыкают управляющую цепь и через цепь выключателя 24 проверяют срабатывание аналогичных датчиков на противо.положных концах платформ. При заг ыкании всей цепи срабатывает левый управляющий электромагнит гидрораспределителя 10 и передвигает его на одну секцию влево, в результате рабочая жидкость меняет направление движения. Правый гидродомкрат принимает- на себя нагрузку и приподнимает платформу с судном еще на один ход гидродомкрата, а левый гидродомкрат становится ненагруженным и подтягивает свой поршень в верхнее положение. Поочередная работа гидродошфатов 5 обеспечивает подъем судна на необходимую высоту.
Для выполнения разгрузки навалочных грузов судно поднимается горизонтально до упора п.патформы 1 в ограничитель б, при этом срабатывает выключатель 24 и выводит из работы гидродомкраты 5, рас.положенные у внутренних опорных колонн, сопряженных с приемным бункером 3. Гидродомкраты же наружных колонн продолжают подъем и создцают судоподъемным платформам, а следовательно, и судну необходимый .:крён. После этого открывается клиновой замок 29/ и борютовые створки 27 и 28 распахиваются под тяжестью груза. Груз ссыпается в бункер 3, а дальше с помощью транспортера 4 передается на береговые склады или на тракс:портные средства
Спуск судна осуществляется .под действием сил тяжести-и происходит следующим образом. При включении электрического пускателя спуска 20 замыкаются цепи правых электромагнитов
гидрораспределителей 10 и 11, при
этом гидрораспределитель 10 соединяет между собой нижние полости гидродомкратов, а гидрораспределитель 11 верхние через гидрораспределитель 12
спуска и дроссель 13, Управление спуском осуществляется датчиками 22 и 23. Под действием сил тяжести судна и платформ 1 в гидродомкратах, у которых поршень находится в нижнем кра нем положении, создается повышенное давление а другие гидродомкраты находятся в верхнем крайнем положении или вообще не сцеплены с колонками. При Нс1хождении поршня гидродомкрата в верхнем крайнем положении происходит замцкание его датчика 22 а наличие э-амкнутого датчика 23 обес печивает замыкание цепи управляющих электромагнитов гидрораспределителя 12 и воздухораспределителя 17, которые отклоняются от нейтрального положения, и гидрораспределитель снимает повышенное давление из верхней полости использовавшего свой ход гидродомкрата, а воздухораспределитель подает воздух в цилиндр 16 и с помощью его выводит гидродомкрат из зацепления с колонной. При этом рабочая жидкость через дроссель 13 под небольшим давлением поступает в верхнюю полость этого гидродомкра та, его поршень идет вниз и размыка ет контакт датчика 22. Под действием возвратных пружин гидрораспределитель 12 и воздухораспределитель 17 занимают нейтральное положение. Так как верхние полости гидродомкратов 5 соединены между собой через дроссель 13, то жидкость из одной полос ти перетекает в другую с заданной скоростью, обуславливая скорость спуска судна. По окончании хода работ акицего гидродомкрата датчики 22 и 23 проверяют законченность цикла и происходит новое перераспределени нагрузки на гидродомкраты и их переключение. Платформы 1 вместе с судном 25 с заданной скоростью опускаются Б воду. Формула изобретения Устройство для боковой разгрузки судов с навалочными грузами, включгио1цее судоподъемные платформы, кинематически связанные с приводом их перемещения и сопрягаемае с приемным бункером, отличающееся тем, что, с целью повышения нгадежности , привод перемещения каждой судоподъемной платформы содержит опорные колонны, короткоходовые гидродомкраты с упорами, электрическими датчиками и управляющими пневматическими цилиндрами, при этом опорные колонны расположены по краям судоподъемных платформ, и одни из опорных колонн выполнены сопряженными с приемным бункером, при этом другие опорные колонны расположены напротив опорных колонн, сопряженных с приемным бункером, и выполнены изогнутыми в верхней части в сторону приемного бункера по радиусу, равному ширине судоподъемной платформы, причем короткоходовые гидродомкраты с одной стороны шарнирно связаны с судоподъемной платформой, а с другой выполнены сопрягаемыми посредством упоров с опорными площадками, выполненными на опорных колоннах, при этом опорные колонны, сопряженные с приемным бункером, снабжены ограничителями подъема судоподъемной платформы. Источники информа1;ии, принятые во внимание при экспертизе 1. Патент ФРГ 1956112, кл, 81е, 96, 29.10.70 (прототип). .w. .. /
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТИКАЛЬНЫЙ СУДОПОДЪЕМНИКI т" '^Wirr -.9I ^..,;,.; 1..U... ..ISEHDAIiJ'icKA | 1965 |
|
SU172685A1 |
| Вертикальный судоподъемник | 1988 |
|
SU1558769A1 |
| Подъемный механизм вертикального судоподъемника | 1988 |
|
SU1523471A1 |
| Подъемный механизм вертикального судоподъемника | 1977 |
|
SU679478A1 |
| Вертикальный судоподъемник | 1972 |
|
SU506687A1 |
| Устройство для вертикального подъема и спуска судов | 1972 |
|
SU468833A1 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| Судоподъемник | 1981 |
|
SU1174324A1 |
| Способ демонтажа механизированной лавной крепи на крутопадающих пластах | 1990 |
|
SU1796772A1 |
| Подъемник для подачи блоков судов в сухой док | 1979 |
|
SU775220A1 |