1
Изобретение относится к электротгехнике, а именно к устройствам управле- ния электроприводом стапельных транспортирукндих устройств листообрабатывающих машин, например листовых печатных машин.
Известен блок управления стапельным транспортирукядим устройством печатной машины, содержащий привод с регулируе-Ю мой скоростью подачи стапеля и датчик высоты стапеля, выполненный в виде рычажного щупа р..
В этом блоке применяется много- |5 скоростной электродвигатель, который работает непрерывно с постоянной скоростью, подача стапеля в режиме отделения и транспортирования изделий печатной машиной производится 20 на пониженной скорости путем подключения электродвигателя к приводу стапельного стола с помощью электромагнитной муфты по сигналам датчика высоты стапеля, а подача стапеля 25 при перезарядке производится на повышенной скорости, при этом переключение скорости подачи с пониженной на повышенную и обратно осуществляется вручную.30
Применение электрсмагнитной муфты усложняет кинематику стапельного транспортирующего устройства и снижает надежность машины. Кроме того, в известном блоке управления при высокостапельном самонакладе печатной машины для сокращения непроизводительных потерь времени на пере- зарядку стапеля приходится выбирать электродвигатель чрезмерно высокой мощности.
Наиболее близким к предлагаемому по технической сущности является блок управления стапельным транспортирующим устройством, содержаший двигатель подачи стапеля, подключенный к регулятору напряжения, генератор напряжения, механически связанный с синхронизатором и через мостовую схему и логический блок подключенный ко входу регулятора напряжения, датчик положения стапеля, соединенный с логическим блоком, и датчик высоты стапеля 2. ,
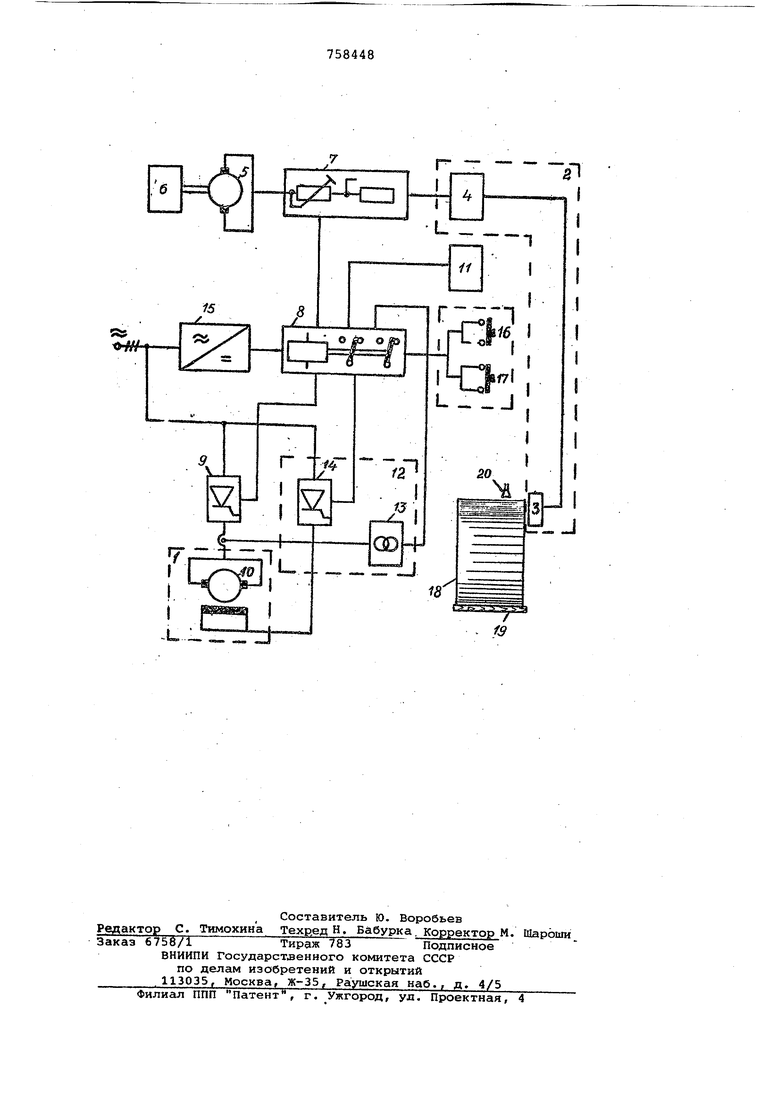
В таком блоке управления г.омимо привода с регулируемой скоростью, осуществляющего подачу в режиме отделения и транспортирования изделий машиной, используется дополнительный привод с постоянной скоростью подачи в режиме перезарядки стапеля, а датчик высоты стапеля выполнен в виде рычажного стапеля, а датчик высоты стапеля выполнен в виде рычажного щупа, циклически взаимодействующего с поверхностью отделяемого изделия, и индуктивног преобразователя, электрически соединенного через логический блок с сервоприводом, механически связанным с потенциометром, включенным в мостовую схему. Применение отдельного привода подачи для перезарядки стапеля усложняет кинематическую схему и требует использования дополнительного электродвигателя значительной установленной мощности. Кроме того, циклическое взаимодействие датчика высоты стапеля с отдельным изделием ухудшает условия его транспортирования, что снижает производительность транспортировки. Цель изобретения,- повышение пр изводительности транспортировки, у щение кинематической схемы и сниже установленной мощности привода. Поставленная цель достигается т что в известной блок дополнительно введен корректор скорости подачи п вода в зависимости от величины заг ки стапеля, состоящий из датчика т якоря двигателя и регулятора возбу дения двигателя, а датчик высоты, стапеля выполнен в виде емкостного датчика с преобразователем, соедин ным с мостовой схемой, причем датчик тока якоря соединен со входом регулятора возбуждения через логи ческий блок. На чертеже представлена блоксхема управления стапельным транспортирующим устройством листообрабатывающей машины. Блок управления состоит из -привода 1 с регулируемой скоростью, представляющего собой двигатель постоянного тока с независимым воз дением, датчика 2 высоты стапеля, включающего емкостный датчик 3 . и преобразователь 4 емкости датчик в сопротивление; генератора 5 напр жения, механически связанного с синхронизатором б и электрически с схемой 7, логического блока 8, аналогового (например, тиристорного) регулятора 9 напряжения якоря 10, датчика 11 положения стапеля, корректора 12 скорост подачи привода в зависимости от ве личины загрузки стапеля, включающе го датчик 13 тока якоря двигателя аналоговый (например, тиристорный .регулятор 14 возбуждения двигателя источника 15-постоянного напряжени и кнопок 16 и 17 управления ускоре ным перемещением, отделение издели Г8, установленных на стапельнрм ст е 19 пневматическими присосами 20. Емкостный датчик 3 выполнен в виде лоского конденсатора с гребенчатыми электродами, расположенными на диэлектрическом основании, и установен вплотную к боковой поверхности стапеля в зоне отделения транспортируемых изделий. Входы логического блока 8 подключены к мостовой схеме 7, датчику 11 положения стапеля, датчику 13 тока якоря двигателя, источнику 15 постоянного напряжения и кнопкам 16, 17, а выходы - ко входам управления аналоговых регуляторов 9 напряжения якоря 10 и 14 воздуждения двигателя. Выходное напряжение генератора 5 при работе листоперерабатывающей машины пропорционгшьно скорости отделения и транспортирования изделий за счет механической связи с синхронизатором 6. Устройство работает следующим образом, После загрузки стапеля при нажатии кнопки 16 ускоренного подъема логический блок 8 подключает вход управления аналогового регулятора 9 к источнику 15 постоянного напряжения, а вход управления аналогового регулятора 14 - к датчику 13 тока якоря, и привод начинает перемещение стапеля вверх. При этом, напряжение на якоре двигателя устанавливается постоянным, а напряжение возбуждения устанавливается в зависимости от тока якоря двигателя, который пропорционален массе стапеля такой величины, что максимальной массе стапеля соответствует минимальная скорость подъема. При достижении изделием 18 уровня пневматических присосов 20, контролируемого датчиком 11 положения стапеля, по сигналу последнего логический блок 8 переключает вход аналогового регулятора 9 от источника 15 к мостовой схеме 7, а вход аналогового регулятора 14 - от датчика 13 тока якоря к источнику 15 постоянного Напряжения. При этом, если листообрабатывакнцая машина не работает, то привод 1 выключается и подъем стапеля прекращается, так как напряжение генератора 5, питающего мостовую схему 7, равно нулю. При пуске машины начинается отделение и транспортирование изделий 18 присосами 20. За счет механической связи синхронизатора 6 с генератором 5, питающим мостовую схему 7, напряжение разбаланса последней- воздействует на аналоговый регулятор 9, приводя в действие привод 1, который поднимает стапель. Скорость подъема стапеля определяется величиной выходного напряжения мостовой схемы 7, которое не зависит от массы стапеля и пропорционально скорости JЭтдeлeния и транспортирования изделий машиной. Скорость подъема
устанавливается регулирующим по-teHUHOMeTpOM мортовой схемы 7 Тако величины, что уровень отделяемого изделия стапеля находится в зоне работы пневматических присосов, и дополнительно контролируется емкостным датчиком 3. Если уровень отделяемого изделия в процессе съема и транспортирования изменяется, например из-за изменения толщины изделия, то изменяется и емкость датчика 3, Это изменение емкости датчика через преобразователь 4 емсти в сопротивление производит изменение выходного напряжения мостовой схемы 7, которое, воздействуя на аналоговый регулятор 9, вызывает изменение скорости подачи привода 1, Изменение скорости подачи привода существует до тех пор, пока возмущение, вызванное изменением толщины изделий, не компенсируется .
После выработки машиной всех изделий стапельный стол 19 опускается кнопкой 17 для новой загрузки При нажатии кнопки логический блок 8 переключает вход управления аналоговым регулятором 9 к источнику 15 постоянного напряжения, а вход управления аналоговым регулятором 14 - к датчику 13 тока якоря двигателя, и двигатель привода 1 опускает стапельный стол. В связи с HOIHHмальным значением тока якоря двигатля, опускакицего пустой стапельный стол, скорость перемещения стола максимальна.
При использовании предлагаемого устройства сокращение общего времени на подъем и опускание стапеля при его перезарядке (при соотношении высоты подъема к высоте опускания 1:10; по сравнению с известными составляет 36%. Кроме того, в связи с уменьшением скорости подъема максимально загруженного стапеля в два раза установленная мощность двигателя подачи также уменьшается в два раза.
в сравнении с известным техническим решением применение предлагаемого блока управления упрощает кинематическую схему, так как исключается дополнительный привод с пос.тоянной скоростью подачи и сервопривод датчика высоты стапеля, а бес контактное измерение уровня стапеля емкостным датчиком улучшает отделение и транспортирование изделий, что повЕлиает производительность тран0спортировки .
Формула изобретения
Блок управления стапельным транспортирукяцим устройством, содержащий двигатель привода подачи стапеля, подключенный к регулятору напряжения, генератор напряжения, механически
связанный с синхронизаторе и через мостовую схему и логический блок подключенный ко входу регулятора напряжения , датчик положения стапеля, соединенный с логическим блоком, датчик высоты стапеля, о т л и чающийся тем, что, с целью
повышения производительности транспортировки , упрощения кинематической схемы и снижения установленной мощности, в него дополнительно введен корректор скорости подачи привода в зависимости от величины загрузки стапеля, состоящий из датчика тока якоря двигателя и регулятора возбуждения двигателя, а датчик высоты
стапеля выполнен в виде емкостного датчика с преобразователем, соединенным с мостовой схемой, причем датчик тока якоря соединен со входом регулятора возбуждения через логический блок.
40
Источники информации, принятые во внимание при зкспертизв
1.Патент ФЕГ.-,№ 1175698, кл. 15 е 10, 22.04.65.
2.Авторское свидетельство ГДР 45 592701, кл. В 65 Н 3/08, февраль
1978.
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок управления стапельным транспортирующим устройством | 1975 |
|
SU592701A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 1991 |
|
RU2025883C1 |
| Электропривод постоянного тока | 1980 |
|
SU904168A1 |
| Устройство для разбора стопы листовогоМАТЕРиАлА | 1975 |
|
SU848455A1 |
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| Устройство для бокового выравнивания стапеля листов в самонакладах | 1978 |
|
SU901219A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159984C1 |
| Устройство для управления бесконтактным электродвигателем постоянного тока | 1981 |
|
SU1020951A1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |