(54) УСТРОЙСТВО ДЛЯ ЗАХВАТА, ХРАНЕНИЯ / И ОСВОБОЖДЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ
I
Изобретение относится к автоматизации транспортных операций и может быть использовано в шинной промышленности при производстве, хранении и погрузке шин, например велошин.
Известны устройства для навешивания заготовок автопокрышек на конвейер, содержашие шарнирно закрепленные рычажные подвески, выполненные в виде двух, телескопических штанг с фиксатором, соединенных рычагами, снабженных захватами верхнего борта автопокрышек 1.
Однако невозможно на одну подвеску навешивать несколько автошин.
Наиболее близким по технической суш,ности и достигаемому результату к изобретению является устройство для захвата, хранения и освобождения цилиндрических изделий, включаюшее штангу с подвижными и неподвижными секциями, рычажный замок, копир и раму с шарнирно-закрепленными на ней рычажными захватами 2.
Недостатком этого устройства является невозможность захватывать одновременно несколько вложенных в стопу шин, имеюших малую жесткость и неотцентрированных например велошин.
Целью изобретения является автоматизация захвата и хранения одновременно не-скольких неотцентрированных цилиндрических изделий.
Указанная цель достигается тем, что устройство снабжено гибкими тягами для соединения рамы с захватами, которые шарнирно закреплены на подвижной секции штанги.
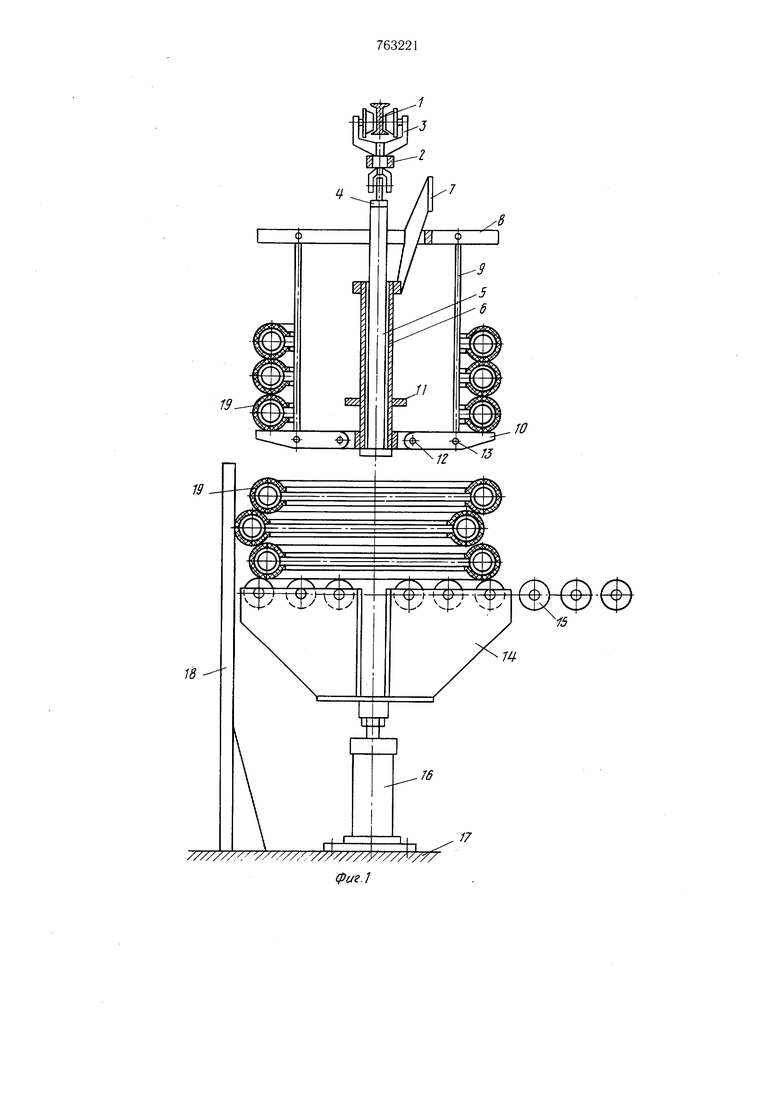
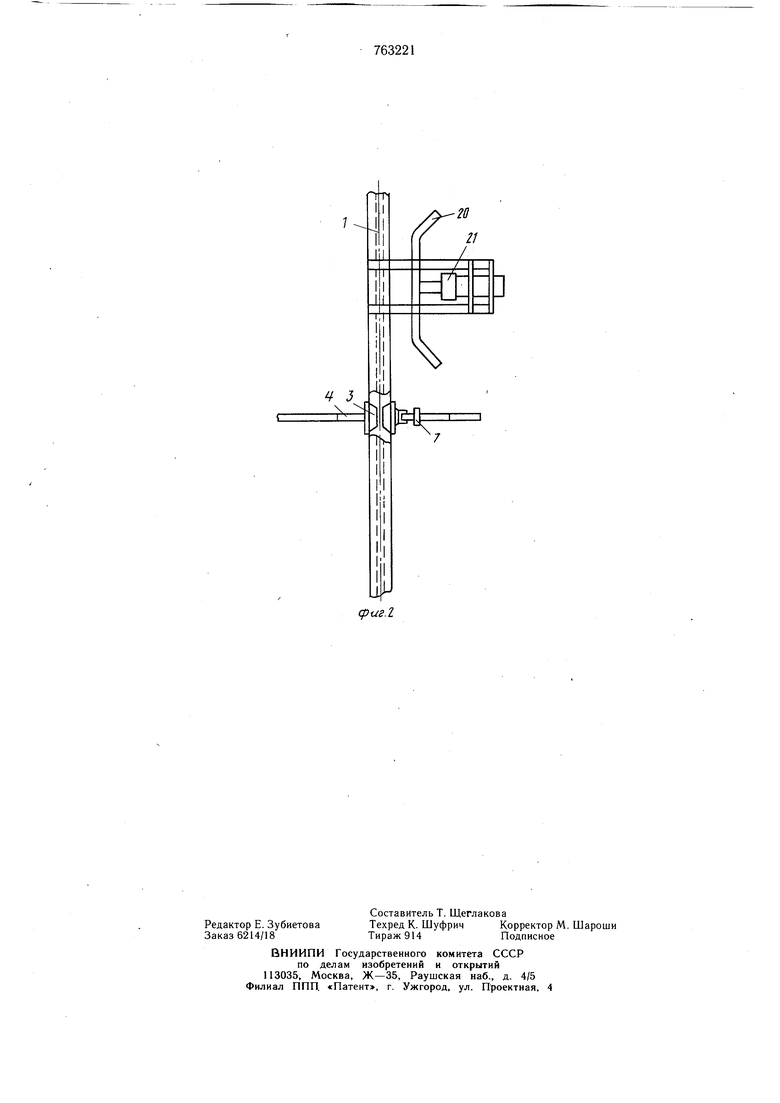
На фиг. 1 изображен обший вид устройст..ва для захвата, хранения и освобождения цилиндрических изделий; на фиг. 2 - схема
)0 взаимодействия копира с замком.
Устройство для захвата, хранения и освобождения цилиндрических изделий включает ходовой путь 1 конвейера, скрепленный с тяговым элементом 2, ходовые каретки 3,
15 на которых шарнирно закреплены рычажные подвески 4, содержашие штангу, выполненную в виде неподвижной секции 5 и подвижной секции 6, скрепленных рычажным замком 7. На штанге к верхнему концу ее подвижной секции 5 жестко прикреплена крестовина 8 с вертикальными гибкими тягами 9, отстоящими от продольной оси штанги.
Рычажные захваты 10 выполнены в виде двуплечих рычагов, внутренними концами шарнирно-прикрепленных к нижнему концу подвижной секции 6, а средними участками они скреплены с гибкими тягами 9 с возможностью их поворота Б вертикальной плоскости вверх до упора 11 и вниз относительно оси 12 и оси 13 закрепления нижних концов гибких тяг 9 к средним участкам рычагов 10. Загрузочный стол 14 имеет рольганг 15, перемещающийся вертикально пневмоцилиндром 16, установленным на неподвижном основании 17. На основании 17 жестко смонтирован упор 18, обеспечивающий центровку цилиндрических изделий, например велощин 19; на участке разгрузки установлен копир 20, выполненный в виде штанги с пневмоцилиндром 21. Автоматическое устройство работает еледующим образом. По ходовому пути 1 посредством тягового элемента 2 двигаются ходовые каретки 3 с щарнирно закрепленными рычажными подвесками 4. Несколько неотцентрированных велошин 19, уложенных в стопу по рольгангу 15, подают на загрузочный стол 14 и останавливают упором 18. В момент подхода рычажной подвески 4 к центру загрузочного стола 14 конвейер останавливается. Срабатывает пневмоцилиндр 16, загрузочный стол 14 вместе с велощинами 19 поднимается, рычажные захваты 10, взаимодействующие с велошинами 19. поворачиваются относительно осей 12 вверх; все вместе образует конус, при этом гибкие тяги 9 ослабевают, что обеспечивает свободный проход всей стопы велощин 19 внутренними отверстиями на рычажную подвеску 4. В момент прохождения нижней велощины рычагов 10 последние под действием сил тяжести занимают нормальное горизонтальное положение. Затем пневмоцилиндр 16 опускает загрузочный стол 14, а стопа велошин 19 удерживается рычагами 10 на рычажной подвеске 4. Своим весом стопа велошин 19 через двуплечие р.ычаги 10 перемещает подвижную секцию 6 по неподвижной секции 5 штанги по фиксации рычажным замком 7. При заполнении рычажной подвески 4 конвейер включается и подводит следующую рычажнук) подвеску 4 к загрузочному столу 14. На участке разгрузки рычажных подвесок 4 копир 20 (фиг. 2), приводимый в действие пневмоцилиндром 21, воздействует на рычажный замок 7, под действием веса стопы велошин 19 двуплечие рычаги 10 поворачиваются относительно оси 13 внешним концом вниз, а внутренний конец рычага 10, поворачиваясь относительно оси 12, вместе с подвижной секцией 6 перемещается вверх до упора 11, при этом велошины 19 освобождают рычажную подвеску 4, после чего подвижная секция 6, двуплечие рычаги 10 и рычажной замок 7 становятся в исходное положение. Использование устройства для захвата, хранения и освобождения цилиндрических изделий позволяет повысить производительность труда на заключительных участках обработки шин почти в два раза, облегчаются условия труда и повышается культура производства. Формула изобретения Устройство для захвата, хранения и освобождения цилиндрических изделий включающее щтангу с подвижными и неподвижными секциями, рычажный замок, копир и раму с шарнирно-закрепленными на ней рычажными захватами, отличающееся тем, что, с целью автоматизации захвата и хранения одновременно нескольких неотцентрированных цилиндрических изделий, оно снабжено гибкими тягами для соединения рамы с захватами, которые щарнирно закреплены на подвижной секции штанги. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 181535, кл. В 65 G 47/04, 1964. 2.Авторское свидетельство СССР № 510420, кл. В 65 G 47/00, 1973.
///////// .- У///////У//// //7/
фиг Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическо устройство для захвата,хранения и освобождения цилиндрических изделий,транспортируемых конвейером | 1973 |
|
SU510420A1 |
| Устройство для горизонтальной загрузки длинномерных изделий | 1978 |
|
SU865741A1 |
| Устройство для транспортировки колес | 1977 |
|
SU740638A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Устройство для подравнивания проката на холодильнике | 1987 |
|
SU1533798A1 |
| Устройство для спуска и подъема объектов | 1982 |
|
SU1082751A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для загрузки пресс-форм порошкообразным материалом | 1982 |
|
SU1027065A1 |
| Автоматическая линия для механических испытаний изоляторов | 1981 |
|
SU982104A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |