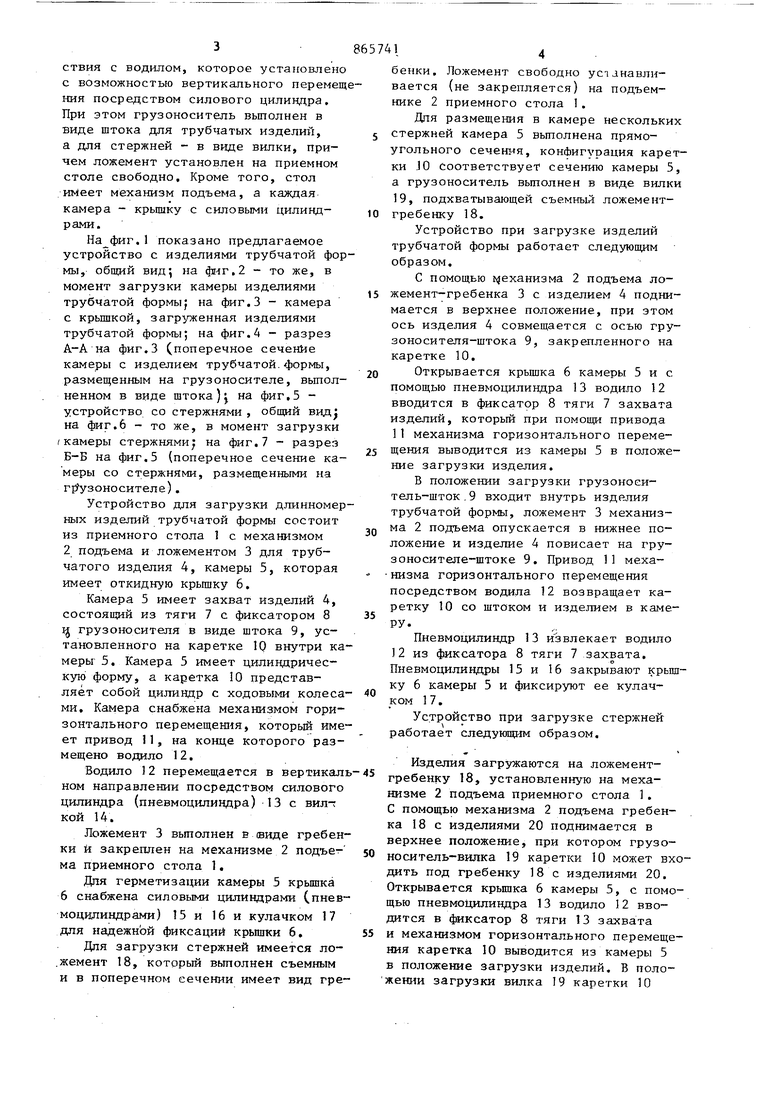
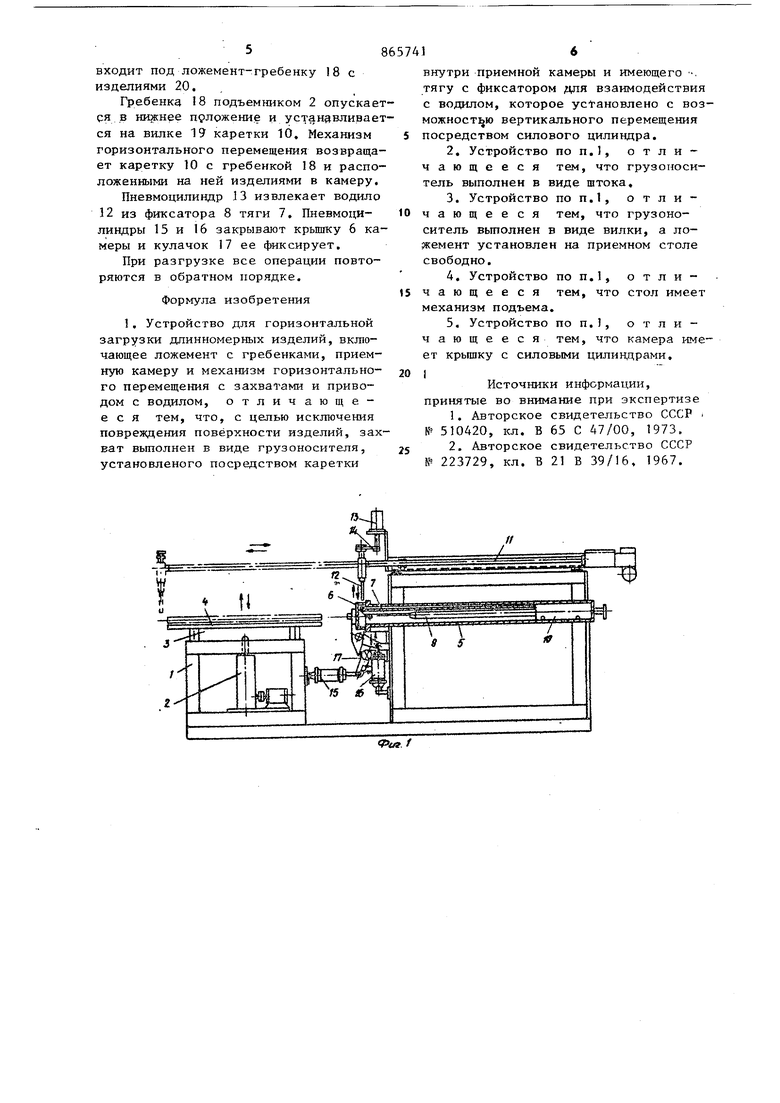
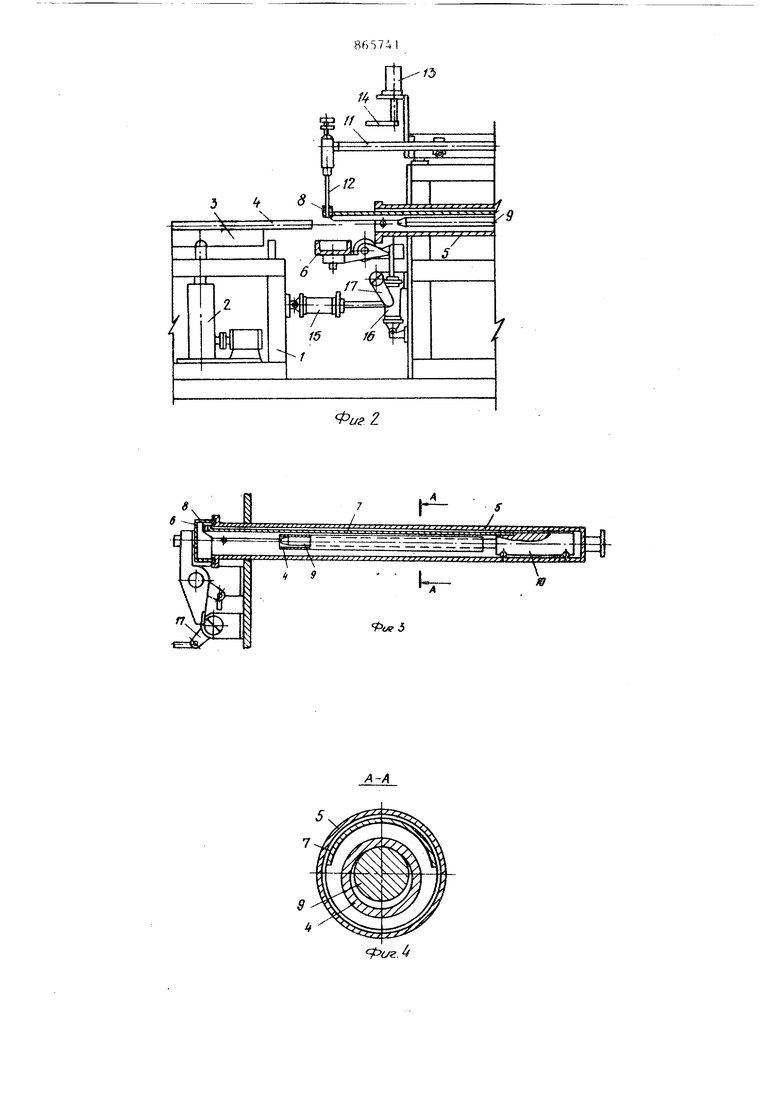
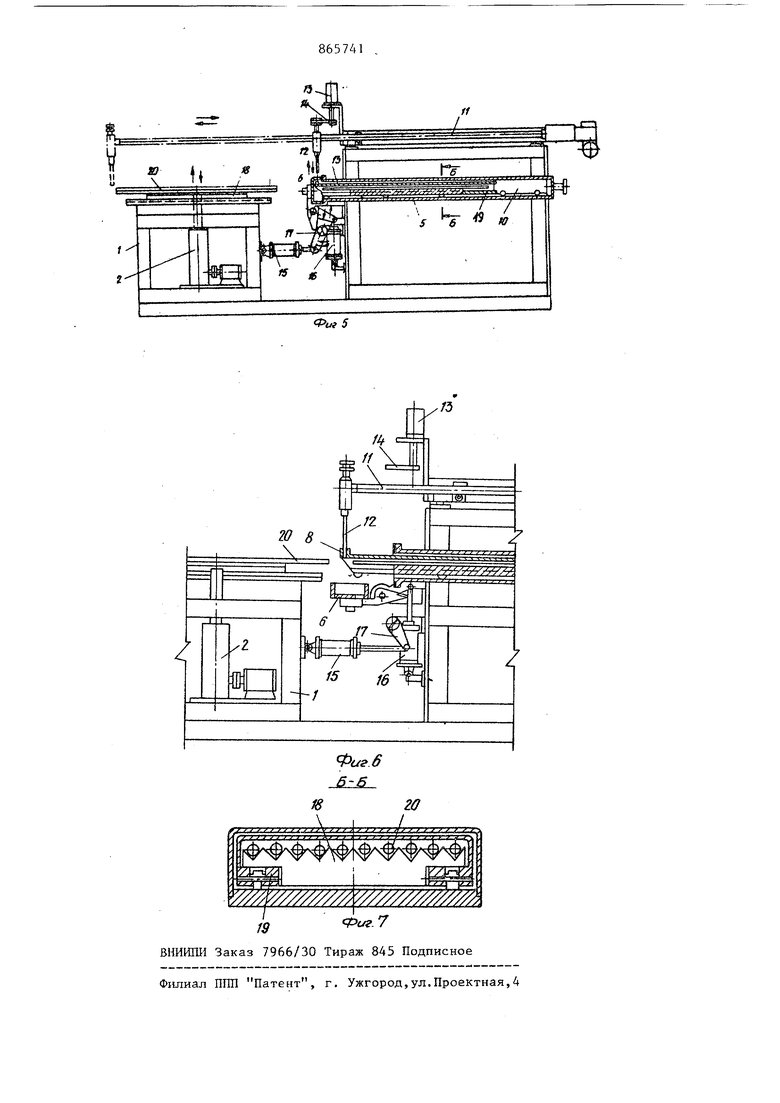
Изобретение относится к транспортному машиностроению, а именно к устройствам для манипулирования изделиями и материалами, в частности, дпя загрузки изделий в камеры технологической обработки и испытаний, Известно устройство для захвата, хранения и освобождения цилиндрических изделий, транспортируемых конвейе ром, имеющее штангу, выполненную в ви де подвижной и неподвижной секций, рычажные захваты, на штанге установлена рама, вертикальные боковые сторо ны которой расположены симметрично продольной оси штанги и проходят внутрь захватываемых изделий. Рычажные захваты этих устройств вьшолнены в виде двух двуплечих рычагов, имеющих возможность поворота в вертикальной плоскости. На торце подвижной се ции штанги установлен фланец, контактирующий с короткими плечами рычагов при этом yrojt поворота рычагов ограничен . Недостатками данной конструкции являются возможность осуществления автоматического захвата только одного изделия, сложность конструкции и возможность повреждения поверхности изделий. Известно также устройство для горизонтальной загрузки длинномерных изделий, включающее ложемент с гребенками, приемную камеру и механизм горизонтального перемещения с захватами и приводом с водилом 2, Недостатком известного устройства является повреждение поверхности изделий, возникающее при перемещении последних по гребенкам в приемную камеру. Цель изобретения - устранение повреждения поверхности изделий. Указанная цель достигается тем, что захват вьтолнен в виде грузоносителя, установленного посредством каретки внутри приемной камеры и имеющего тягу с (jMKcaTopoM для взаимодействия с водилом, которое уста1 овлено с возможностью вертикального перемещ ния посредством силового цилиндра. При этом грузоноситель выполнен в виде штока для трубчатых изделий, а для стержней - в виде вилки, причем ложемент установлен на приемном столе свободно. Кроме того, стол имеет механизм подъема, а каждая камера - крьпику с силовыми цилиндрами. На фиг.1 показано предлагаемое устройство с изделиями трубчатой фор мы, общий вид5 на фг1г,2 - то же, в момент загрузки камеры изделиями трубчатой формы; на фиг.З - камера с крьшкой, загруженная изделиями трубчатой формы; на фиг.А - разрез А-А на фиг.З (поперечное сечение камеры с изделием трубчатой, формы, размещенным на грузоносителе, вьтолненном в виде штока ) на фиг.З устройство со стержнями , общий вид на фиг.6 - то же, в момент загрузки /камеры стержнями на фиг.7 - разрез Б-Б на фиг.З (поперечное сечение камеры со стержнями, размещенными на П узоносителе). Устройство для загрузки длинномер ных изделий трубчатой формы состоит из приемного стола 1 с механизмом 2 подъема и ложементом 3 для трубчатого изделия 4, камеры 3, которая имеет откидную крьшку 6. Камера 5 имеет захват изделий 4, состоящий из тяги 7 с фиксатором 8 IJ грузоносителя в виде штока 9, установленного на каретке 10 внутри ка меры- 5. Камера 5 имеет цилиндрическую форму, а каретка 10 представляет собой цилиндр с ходовыми колеса ми. Камера снабжена механизмом горизонтального перемещения, которьй име ет привод 11, на конце которого размещено водило 12, Водило 12 перемещается в вертикал ном направлении посредством силового цилиндра (пневмоцилиндра) 13 с вилкой 14. Ложемент 3 выполнен в виде гребен ки и закреплен на механизме 2 подъе ма приемного стола 1. Дпя герметизации камеры 3 крьшка 6 снабжена силовыми цилиндрами (пнев моцилиндрами) 13 и 16 и кулачком 17 для надежной фиксаций крьшки 6, Для загрузки стержней имеется ло.жемент 18, который вьтолнен съемным и в поперечном сечении имеет вид гре бенки. Ложемент свободно устанавливается (не закрепляется) на подъемнике 2 приемного стола I. Дпя размещения в камере нескольких стержней камера 3 вьтолнена прямоугольного сечения, конфигурация каретки JO Соответствует сечению камеры 3, а грузоноситель выполнен в виде вилки 19, подхватывающей съемньй ложементгребенку 18. Устройство при загрузке изделий трубчатой формы работает следуюащм образом. С помощью л еханизма 2 подъема ложемент-гребенка 3 с изделием 4 поднимается в верхнее положение, при этом ось изделия 4 совмещается с осью грузоносителя-штока 9, закрепленного на каретке 10. Открывается крьшка 6 камеры 3 и с помощью пневмоцилиндра 13 водило 12 вводится в фиксатор 8 тяги 7 захвата изделий, который при помощи привода 11механизма горизонтального перемещения выводится из камеры 3 в положение загрузки изделия. В положении загрузки грузоноситель-шток.9 входит внутрь изделия трубчатой формы, ложемент 3 механизма 2 подъема опускается в нижнее положение и изделие 4 повисает на грузоносителе-штоке 9. Привод 11 механизма горизонтального перемещения посредством водила 12 возвращает каретку 10 со штоком и изделием в камеру. Пневмоцилиндр 13 извлекает водило 12из фиксатора В тяги 7 захвата. Пневмоцилиндры 13 и 16 закрывают крьшку 6 камеры 3 и фиксируют ее кулачком 17, Устройство при загрузке стержней работает следующим образом. Изделия загружаются на ложементрребенку 18, установленную на механизме 2 подъема приемного стола 1. С помощью механизма 2 подъема гребенка 18 с изделиями 20 поднимается в верхнее положение, при котором грузоноситель-вилка 19 каретки 10 может входить под гребенку 18 с изделиями 20. Открывается крышка 6 камеры 3, с помощью пневмоцилиндра 13 водило 12 вводится в фиксатор 8 тяги 13 захвата и механизмом горизонтального перемещения каретка 10 выводится из камеры 3 в положение загрузки изделий. В положении загрузки вилка 19 каретки 10 входит под ложемент-гребенку 18 с изделиями 20. Гребенка 18 подъемником 2 опуска ся в нижнее положение и устанавлива ся на вилке 19 каретки 10.механизм горизонтального перемещения возвраща ет каретку 10 с гребенкой 18 и распо ложенными на ней изделиями в камеру Пневмоцилиндр J3 извлекает водил 32 из фиксатора 8 тяги 7. Пневмоцилиндры 15 и 16 закрывают крьшжу 6 ка меры и кулачок 17 ее фиксирует. При разгрузке все операции повторяются в обратном порядке. Формула изобретения 1. Устройство для горизонтальной загрузки длинномерных изделий, включающее ложемент с гребенками, приемную камеру и механизм горизонтального перемещения с захватами и приводом с водилом, отличающееся тем, что, с целью исключения повреждения поверхности изделий, зах ват выполнен в виде грузоносителя, установленого посредством каретки внутри приемной камеры и имеющего -. тягу с фиксатором для взаимодействия с водилом, которое установлено с возможност ю вертикального перемещения посредством силового цилиндра. 2.Устройство по п., отличающееся тем, что грузоноситель выполнен в виде штока, 3.Устройство по П.1, отличающееся тем, что грузоноситель вьтолиен в виде вилки, а ложемент установлен на приемном столе свободно. 4.Устройство по П.1, о т л и чающееся тем, что стол имеет механизм подъема. 5. Устройство по п., отличающееся тем, что камера имеет крьппку с силовыми цилиндрами, I Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР , Ff 510420, кл. В 65 С 47/00, 1973. 2. Авторское свидетельство СССР If- 223729, кл. В 21 В 39/16, 1967.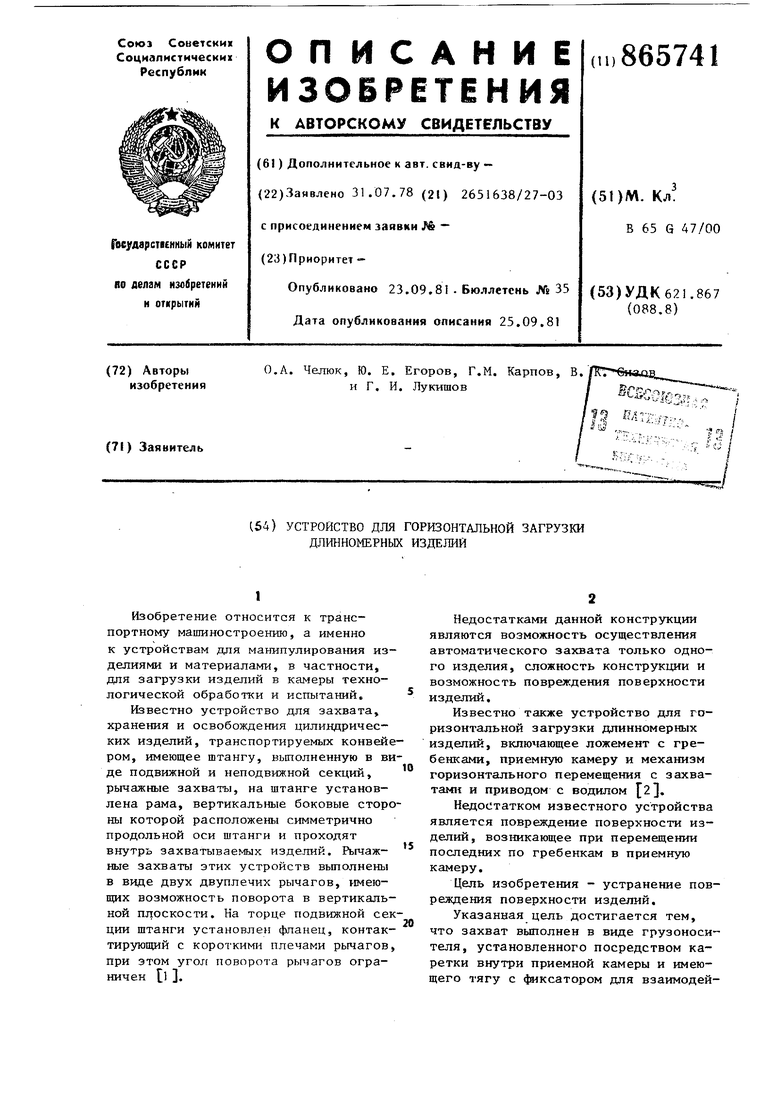
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для сборки пакетов | 1982 |
|
SU1106792A1 |
| Полуавтомат для электронно-лучевой сварки | 1984 |
|
SU1281359A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Перезарядчик к устройству для вулканизации бесконечных резиновых изделий | 1980 |
|
SU897561A1 |
| Устройство для изготовления обрезиненного кордного полотна | 1973 |
|
SU539510A3 |
| Станок для сборки пластинчатых теплообменников | 1976 |
|
SU590128A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Устройство для загрузки и выгрузки | 1983 |
|
SU1110600A1 |
| Способ резки П-образных профилей и штамп для его осуществления | 1988 |
|
SU1766633A1 |
| Устройство для зачистки | 1990 |
|
SU1766691A1 |
Фиг г
/5
