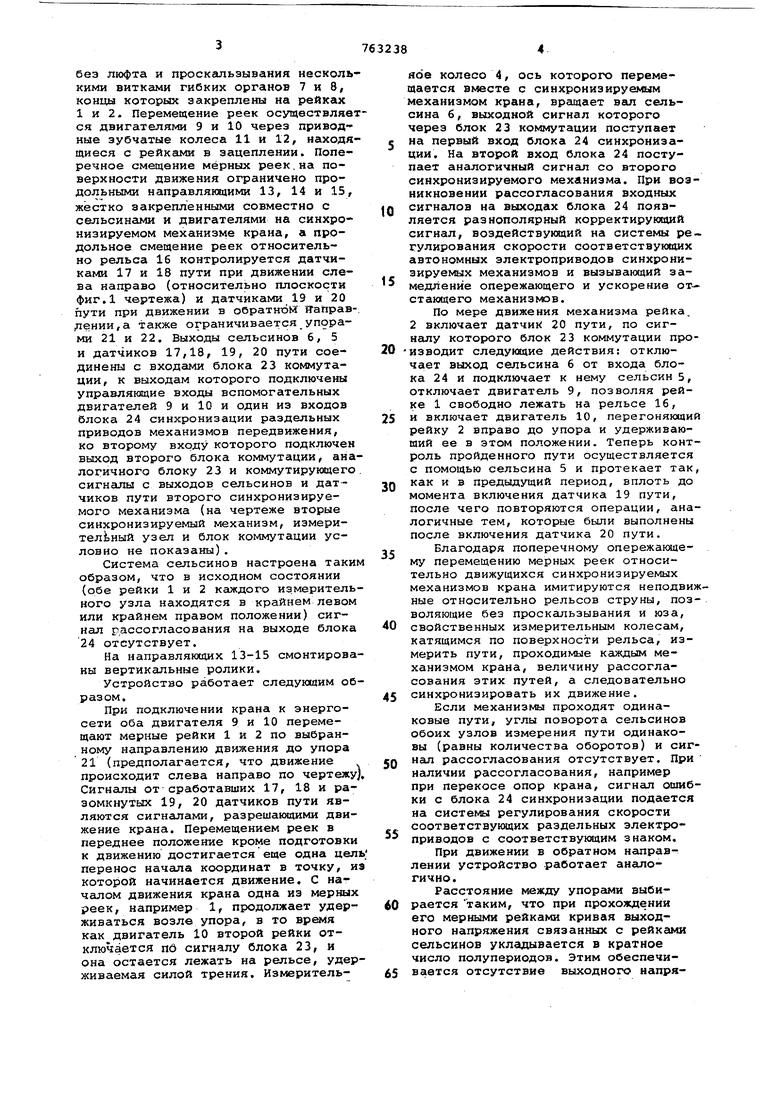
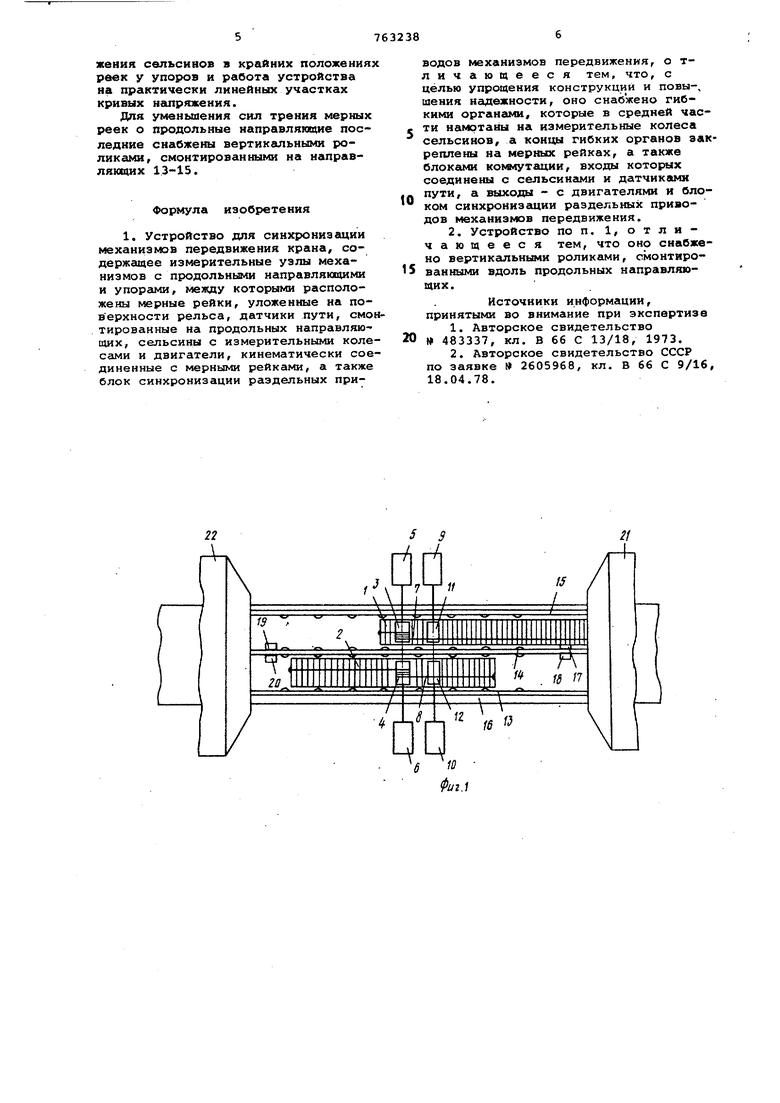
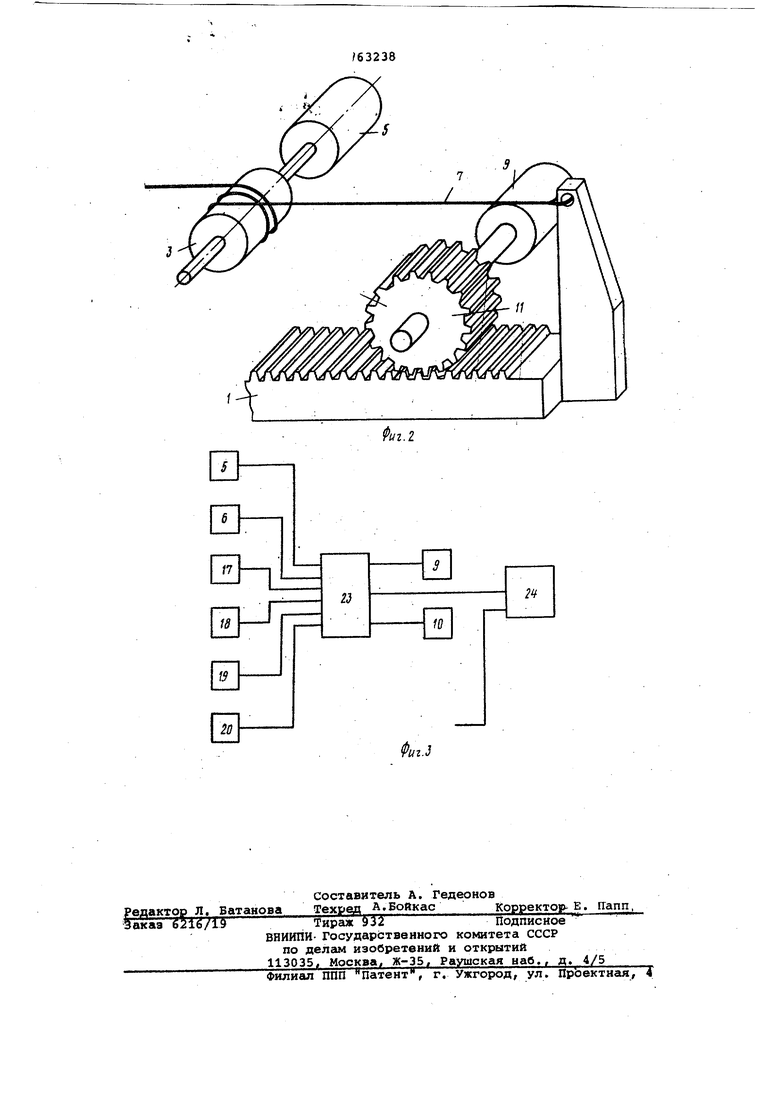
без люфта и проскальзывания несколькими витками гибких органов 7 и 8, концы которых закреплены на рейках 1 и 2. Перемещение реек осуществляеся двигателями 9 и 10 через приводные зубчатые колеса 11 и 12, находящиеся с рейками в зацеплении. Поперечное смещение мерных реек,на поверхности движения ограничено продольными направлягацими 13, 14 и 15, жестко закрепленными совместно с сельсинами и двигателями на синхронизируемом механизме крана, а продольное смещение реек относительно рельса 16 контролируется датчиками 17 и 18 пути при движении слева направо (относительно плоскости фиг,1 чертежа) и датчиками 19 и 20 пути при движении в обратной ТГаправлении,а также ограничивается упорами 21 и 22. Выходы сельсинов 6, 5 и датчиков 17,18, 19, 20 пути соединены с входами блока 23 коммутации, к выходам которого подключены управлякяцие входы вспомогательных двигателей 9 и 10 и один иэ входов блока 24 синхронизации раздельных приводов механизмов передвижения, ко второму входу которого подключен выход второго блока коммутации, аналогичного блоку 23 и коммутирунадего сигналы с выходов сельсинов и датчиков пути второго синхронизируемого механизма (на чертеже вторые синхронизируемый механизм, измерител1 ный узел и блок коммутации условно не показаны).
Система сельсинов настроена таки образом, что в исходном состоянии (обе рейки 1 и 2 каждого из.мерительного узла находятся в крайнем левом или крайнем правом положении) сигнал рассогласования на выходе блока 24 отсутствует.
На направляющих 13-15 смонтированы вертикальные ролики.
Устройство работает следующим образом.
При подключении крана к энергосети оба двигателя 9 и 10 перемещают мерные рейки 1 и 2 по выбранному направлению движения до упора 21 (предполагается, что движение происходит слева направо по чертежу Сигналы от сработавших 17, 18 и разомкнутых 19, 20 датчиков пути являются сигналами, разрешающими движение крана. Перемещением реек в переднее положение кроме подготовки к движению достигается еще одна цел перенос начала координат в точку, и которой начинается движение. С началом движения крана одна из мерных реек, например 1, продолжает удерживаться возле упора, в то время как двигатель 10 второй рейки отключается пб сигналу блока 23, и она остается лежать на рельсе, удерживаемая силой трения. Измерительяое колесо 4, ось которого перемещается вместе с синхронизируемым механизмом крана, вращает вал сельсина б, выходной сигнал которого через блок 23 коммутации поступает на первый вход блока 24 синхронизации. На второй вход блока 24 поступает аналогичный сигнал со второго синхронизируемого механизма. При возникновении рассогласования входных сигналов на выходах блока 24 появляется разнополярный корректирующий сигнал, воздействукхций на системы регулирования скорости соответствующих автономных электроприводов синхронизируемых механизмов и вызывающий замедление опережающего и ускорение отстающего механизмов.
По мере движения механизма рейка. 2 включает датчик 20 пути, по сигналу которого блок 23 коммутации производит следуивдие действия: отключает выход сельсина 6 от входа блока 24 и подключает к нему сельсин 5, отключает двигатель 9, позволяя рейке 1 свободно лежать на рельсе 16, и включает двигатель 10, перегоняющи рейку 2 вправо до упора и удерживающий ее в этом положении. Теперь контроль пройденного пути осуществляется с помощью сельсина 5 и протекает так как и в предыдущий период, вплоть до момента включения датчика 19 пути, после чего повторяются операции, аналогичные тем, которые были выполнены после включения датчика 20 пути.
Благодаря поперечному опережакяаему перемещению мерных реек относительно движущихся синхронизируемых механизмов крана имитируются неподвиные относительно рельсов струны, позволяющие без проскальзывания и юза, свойственных измерительным колесам, катящимся по поверхности рельса, измерить пути, проходимые каждым механизмом крана, величину рассогласования этих путей, а следовательно синхронизировать их движение.
Если механизмы проходят одинаковые пути, углы поворота сельсинов обоих узлов измерения пути одинаковы (равны количества оборотов) и сигНош рассогласования отсутствует. При наличии рассогласования, например при перекосе опор крана, сигнал ошибки с блока 24 синхронизации подается на системы регулирования скорости соответствующих раздельных электроприводов с соответствукяцим знаком.
При движении в обратном направлении устройство работает аналогично.
Расстояние между упорами выбирается таким, что при прохождении его мерными рейками кривая выходного напряжения связанных с рейками сельсинов укладывается в кратное число полупериодов. Этим обеспечивается отсутствие выходного напряжения сельсинов в крайних положениях реек у упоров и работа устройства на практически линейных участках кривых напряжения.
Для уменьшения сил трения мерных реек о продольные направляющие последние снабжены вертикальными роликами, смонтированными на направляющих 13-15.
Формула изобретения
1. Устройство для синхронизации механизмов передвижения крана, содержащее измерительные узлы механизмов с продольными направляющими и упорамяг между которыми расположены мерные рейки, уложенные на поверхности рельса, датчики пути, смонтированные на продольных направляющих, сельсины с измерительными колесами и двигатели, кинематически соединенные с мерными рейками, а также блок синхронизации раздельных приводов механизмов передвижения, о тличающееся тем, что, с целью упрощения конструкций и повы-, шения надежности, оно снабжено гибкими органами, которые в средней части намотаны на измерительные колеса сельсинов, а концы гибких органов закреплены на мерныос рейках, а также блоками кокмутации, входы которых соединены с сельсинами и датчиками пути, а выходы - с двигателями и блоком синхронизации раздельных приводов механизмов передвижения.
2. Устройство поп, 1, отличающееся тем, что оно снабжено вертикальными роликами, смонтированными вдоль продольных направляющих.
Источники информации, принятыми во внимание при экспертизе
1.Авторское свидетельство
0 483337, кл. В 66 С 13/18, 1973.
2.Авторское свидетельство СССР по заявке № 2605968, кл. В 66 С 9/16, 18.04.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронизации механизмов передвижения рельсового крана | 1978 |
|
SU688412A1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Стенд для испытания двух взаимосвязанных электроприводов | 1980 |
|
SU957137A1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| Устройство для синхронизации механизмов передвижения опор крана | 1982 |
|
SU1039856A1 |
| Устройство синхронизации механизмов передвижения крана | 1978 |
|
SU680978A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |
//
