1
Изобретение относится к области станкостроения и может быть использовано, в частности, в вертикально-сверлильных и радиально-сверлильных станках.
Известен механизм управления осевыми перемещениями шпинделя, включающий связанный с .системой управления приводом осевых перемещений щпинделя многопозиционный командоаппарат, взаимодействующий с регулируемыми кулачками, размещенными в установленной с возможностью перемещения плоской панелиС.
Однако известные устройства имеют ряд недостатков, одним из которых является сложность ко«струкций.
Целью изобретения является упрощение конструкции.
Это достигается тем, что на плоской панели выполнены сквозные пазы для установки регулируемых кулачков с нанесенными рисками, а командоаппарат размещен за задней стенкой панели, причем в механизм введена установленная с воз.можностью перемещения линейка-угольник для установки кулачков по упомянутым рискам. Кроме того, механизм снабжен установленными в пазах панели с возможностью регулирования
в вертикальном направлении щтангами, несущими регулируемые кулачки, причем панель выполнена в виде рамки.
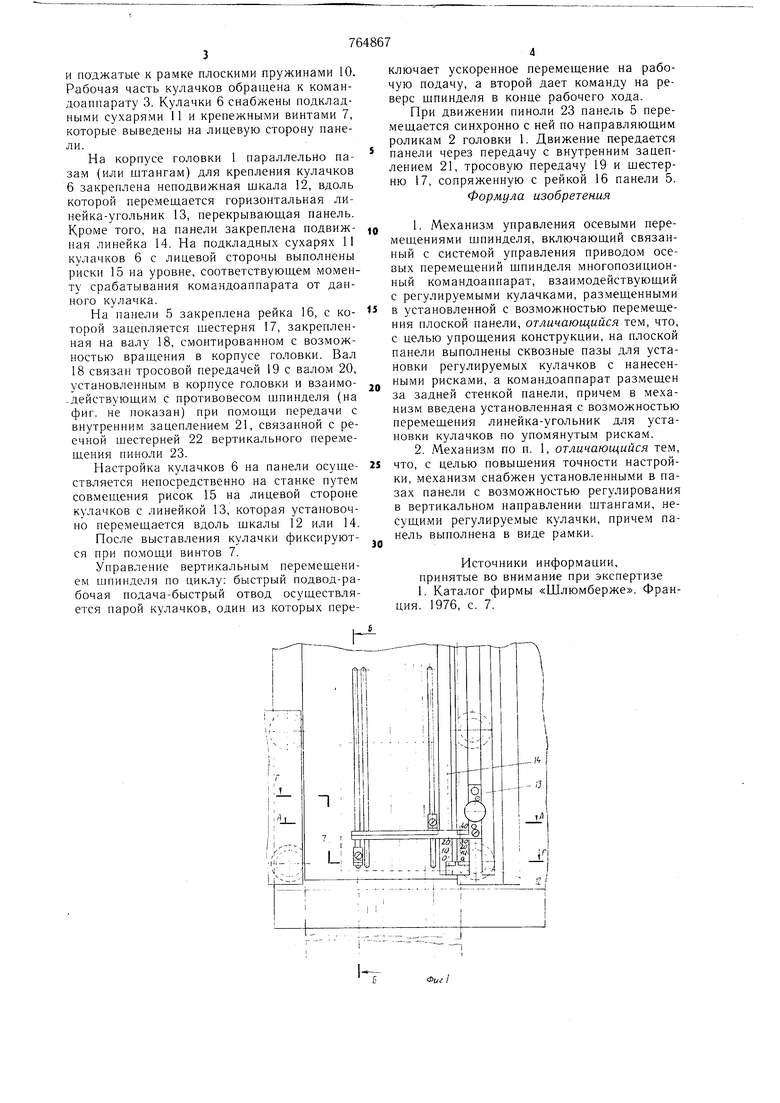
На фиг. 1 изображен механизм управления осевыми перемещениями шпинделя; на
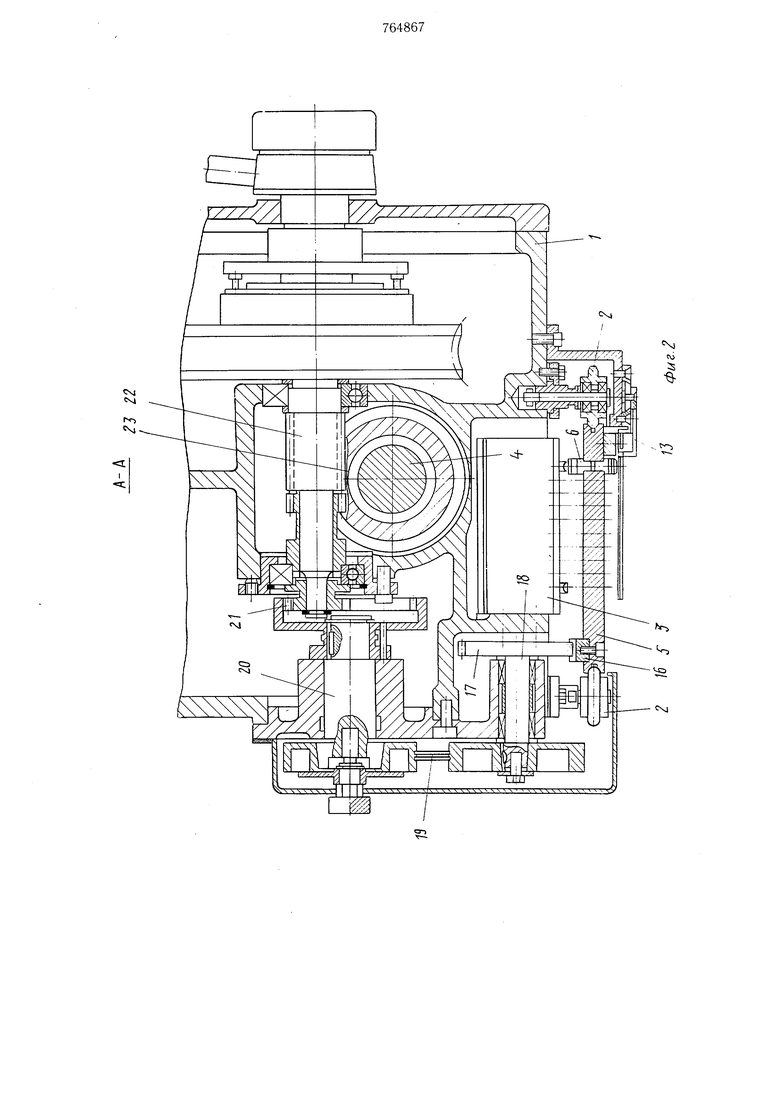
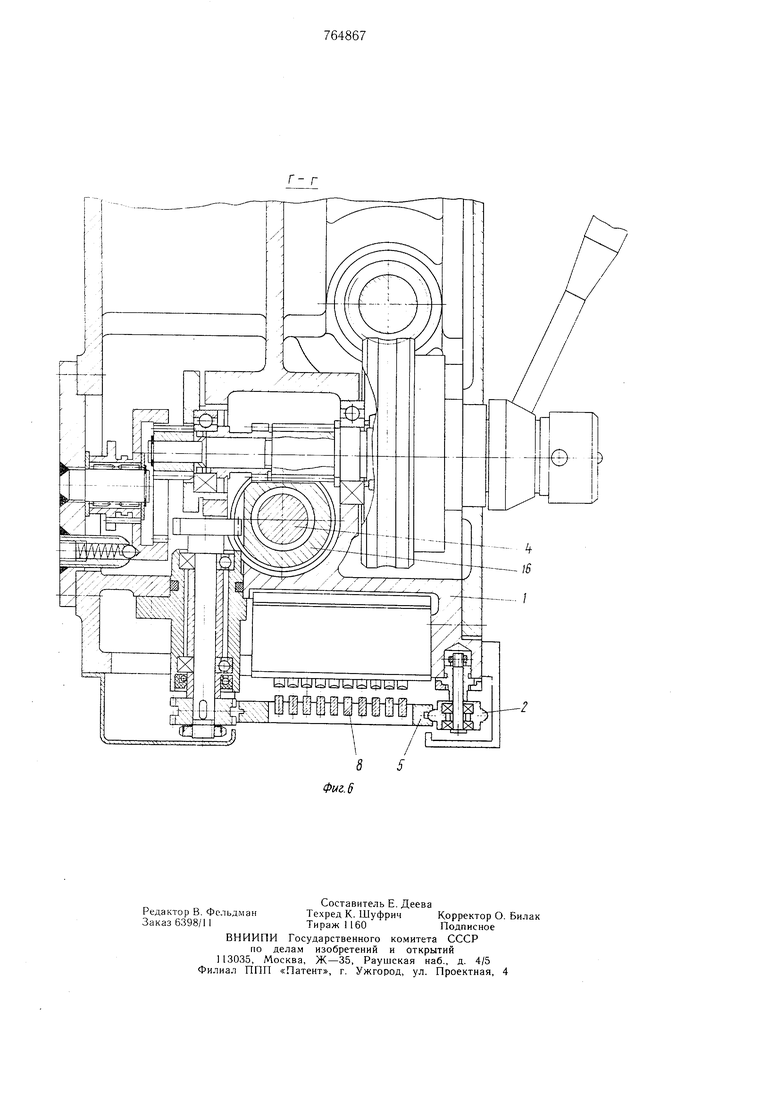
5 фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б - Б на фиг. 1; на фиг. 4 - вариант исполнения панели .механизма; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг. 1.
На корпусе неподвижной в вертикальном
О направлении сверлильной головки 1 закреплены две пары направляющих роликов 2. В корпусе головки размещен командоаппарат 3, связанный с системой управления приводом вертикальных перемещений щпинделя 4. Многопозиционная плоская панель 5,
15 несущая кулачки 6, снабжена по бокам V-образными направляющими паза.ми, с ксГгорыми сопряжены направляющие ролики 2. На панели 5 выполнены сквозные пазы, в которых размещены кулачки 6 с крепежны20 .ми винтами 7. Для повыщения точности настройки панель 5 может быть выполнена в виде рамки, в пазы которой вставлены штанги 8, сверху и снизу опирающиеся скошенными торцами на регулировочные винты 9
и поджатые к рамке плоскими пружинами 10. Рабочая часть кулачков обращена к командоаппарату 3. Кулачки 6 снабжены подкладными сухарями 11 и крепежными винтами 7, которые выведены на лицевую сторону панели.
На корпусе головки 1 параллельно пазам (или штангам) для крепления кулачков 6 закреплена неподвижная шкала 12, вдоль которой перемешается горизонтальная линейка-угольник 13, перекрываюш,ая панель. Кроме того, на панели закреплена подвижная линейка 14. На подкладных сухарях 11 кулачков 6 с лицевой стороны выполнены риски 15 на уровне, соответствующем моменту срабатывания командоаппарата от дапного кулачка.
На панели 5 закреплена рейка 16, с которой зацепляется шестерня 17, закрепленная на валу 18, смонтированном с возможностью вращения в корпусе головки. Вал 18 связан тросовой передачей 19 с валом 20, установленным в корпусе головки и взаимо,действующим с противовесом шпинделя (на фиг. не показан) при помощи передачи с внутренним зацеплением 21, связанной с реечной шестерней 22 вертикального перемещения пиноли 23.
Настройка кулачков 6 на панели осуществляется непосредственно на станке путем совмещения рисок 15 на лицевой стороне кулачков с линейкой 13, которая установочно перемещается вдоль шкалы 12 или 14.
После выставления кулачки фиксируются при помощи винтов 7.
Управление вертикальным перемещением шпинделя по циклу: быстрый подвод-рабочая подача-быстрый отвод осуществляется парой кулачков, один из которых переключает ускоренное перемещение на рабочую подачу, а второй дает команду на реверс шпинделя в конце рабочего хода.
При движении пиноли 23 панель 5 перемещается синхронно с ней по направляющим роликам 2 головки 1. Движение передается панели через передачу с внутренним зацеплением 21, тросовую передачу 19 и щестерню 17, сопряженную с рейкой 16 панели 5. Формула изобретения
1.Механизм управления осевыми перемещениями шпинделя, включающий связанный с системой управления приводом осевых перемещений щпинделя многопозиционный командоаппарат, взаимодействующий с регулируемыми кулачками, размещенными в установленной с возможностью перемещения плоской панели, отличающийся тем, что, с целью упрощения конструкции, на плоской панели выполнены сквозные пазы для установки регулируемых кулачков с нанесенными рисками, а командоаппарат размещен за задней стенкой панели, причем в механизм введена установленная с возможностью перемещения линейка-угольник для установки кулачков по упомянутым рискам.
2.Механиз.м по п. 1, отличающийся тем, что, с целью повышения точности настройки, механизм снабжен установленными в пазах панели с возможностью регулирования в вертикальном направлении штангами, несущими регулируемые кулачки, причем панель выполнена в виде рамки.
Источники информации, принятые во внимание при экспертизе 1. Каталог фирмы «Шлюмберже. Франция. 1976, с. 7.
..Ш
ly I 
| название | год | авторы | номер документа |
|---|---|---|---|
| Сверлильная головка с автоматическим регулированием подачи | 1977 |
|
SU680818A1 |
| МЕХАНИЗМ ПОДАЧИ ШПИНДЕЛЯ СВЕРЛИЛЬНОГО (РАСТОЧНОГО) СТАНКА | 1966 |
|
SU187480A1 |
| Привод подачи рабочего органа многошпиндельного сверлильного станка | 1974 |
|
SU500011A1 |
| Сверлильная головка | 1980 |
|
SU956175A1 |
| Устройство для сверления | 1986 |
|
SU1366317A1 |
| Установка для фасонной обточки пуговиц | 1987 |
|
SU1613354A1 |
| Сверлильный станок | 1982 |
|
SU1105283A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| Сверлильная головка с автоматической подачей | 1978 |
|
SU706199A1 |
| Устройство для обработки резьбовых отверстий | 1982 |
|
SU1100054A1 |