(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1445949A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Захват манипулятора | 1978 |
|
SU766857A1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| Захват манипулятора | 1982 |
|
SU1047680A2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Исполнительный орган манипулятора | 1979 |
|
SU831611A2 |
| Схват промышленного робота | 1981 |
|
SU1006210A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Захват промышленного робота | 1982 |
|
SU1237427A1 |
1
Изобретение относится к робототехнике и может быть использовано для надежного захватывания и закрепления полых деталей различной формы и веса.
Известен захват промышленного робота, содержащий основание, на котором размещены губки, выполненные каждая в виде эластичного баллона, и шланги для подвода рабочей среды i.
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что захват снабжен дополнительными для каждой губки эластичными баллонами, размещенными друг под другом внутри основного эластичного баллона, и дополнительными шлангами для подвода рабочей среды к каждому из дополнительных эластичных баллонов.
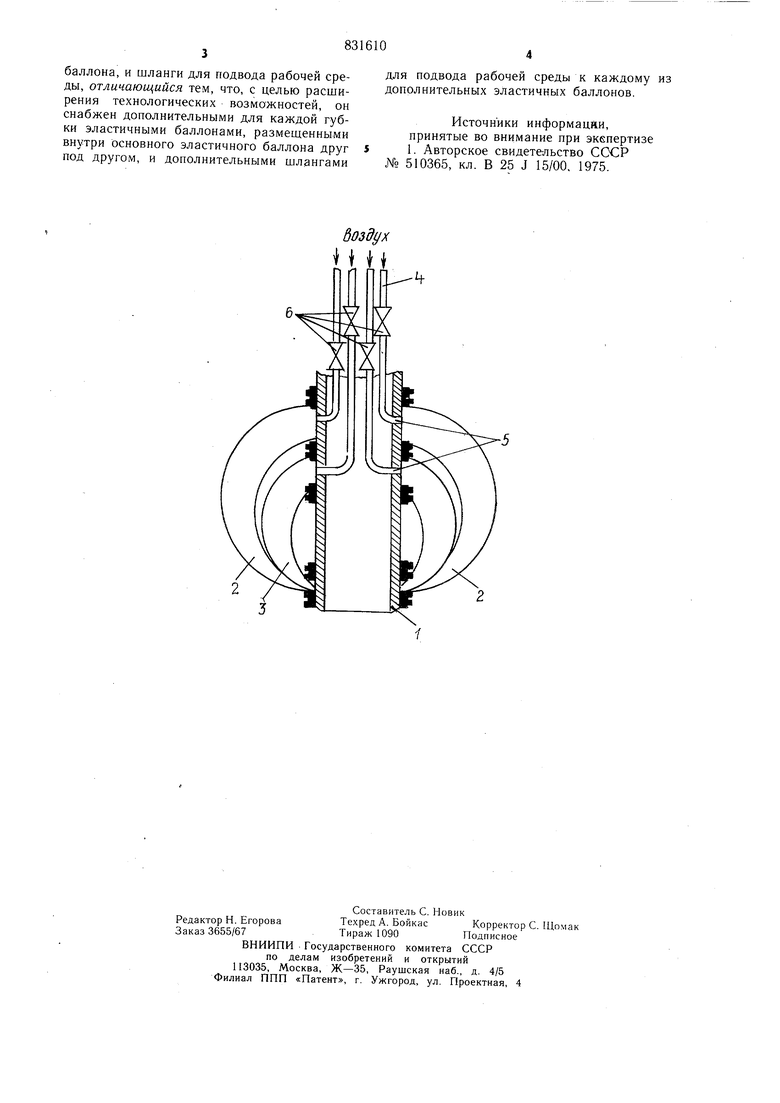
На чертеже показан захват промышленного робота, общий вид.
Захват состоит из основания 1, на котором размещены многослойные эластичные губки, выполненные из основных герметичных баллонов 2 и из размещенных внутри них друг под другом дополнительных эластичных баллонов 3, в которые по шлангам 4 через отверстия 5 в основании 1 подается
рабочая среда, например воздух. Баллоны выполняются из прочного материала, допускающего большие упругие деформации. На шлангах 4, по которым сжатым воздух подается в каждый баллон независимо от подачи его в остальные установлены клапаны 6.
Захват промышленного робота работает следуюшим образом.
При захватывании детали воздух по щлангам 4 поступает в баллоны. Если изделие
имеет полость больших размеров, то сжатый воздух подается во все баллоны 2 и 3 одновременно. Если полость изделия имеет Небольшие размеры, то сжатый воздух подается только в основные баллоны 2. Регулировка усилия, удерживающего изделие,
осуществляется изменением давления сжатого воздуха. Для того, чтобы захват отпустил изделие, воздух стравливается из баллонов.
Формула изобретения
Захват промышленного робота, содержащий основание, на котором размещены губки, выполненные каждая в виде эластичного
баллона, и шланги для подвода рабочей среды, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительными для каждой губки эластичными баллонами, размещенными внутри основного эластичного баллона друг под другом, и дополнительными шлангами
и л
для подвода рабочей среды к каждому из дополнительных эластичных баллонов.
Источники информации, принятые во внимание при экепертизе 1. Авторское свидетельство СССР № 510365, кл. В 25 J 15/00. 1975.
боздух
