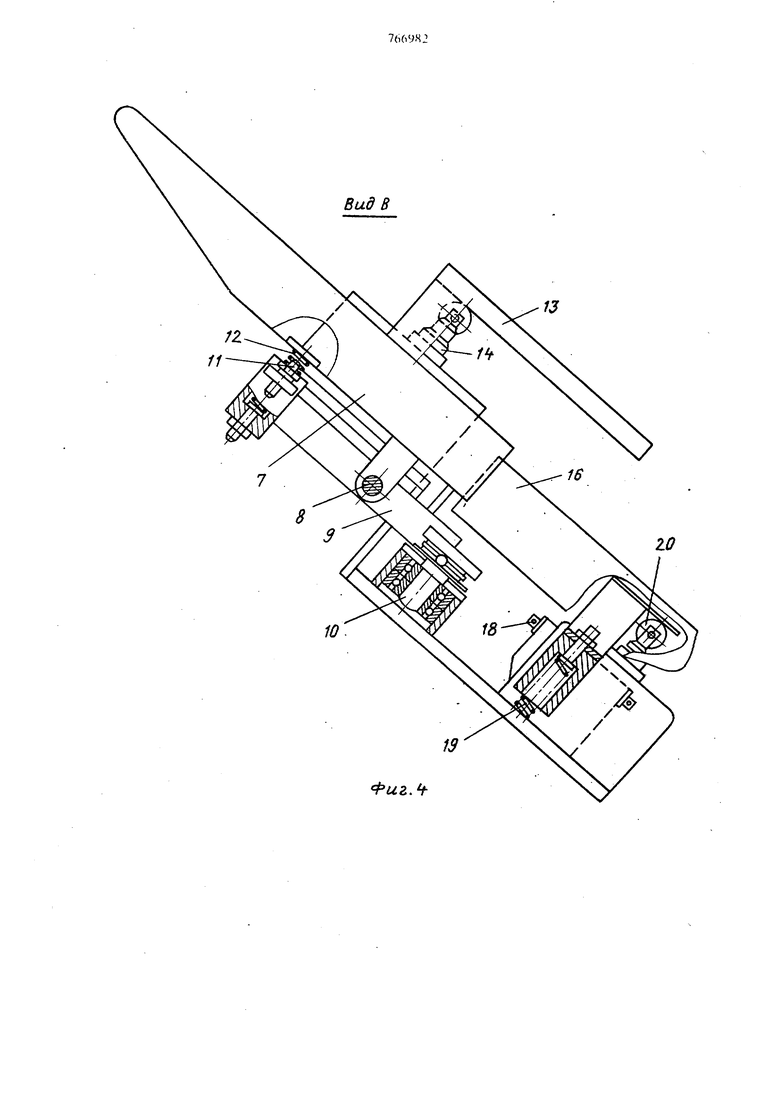
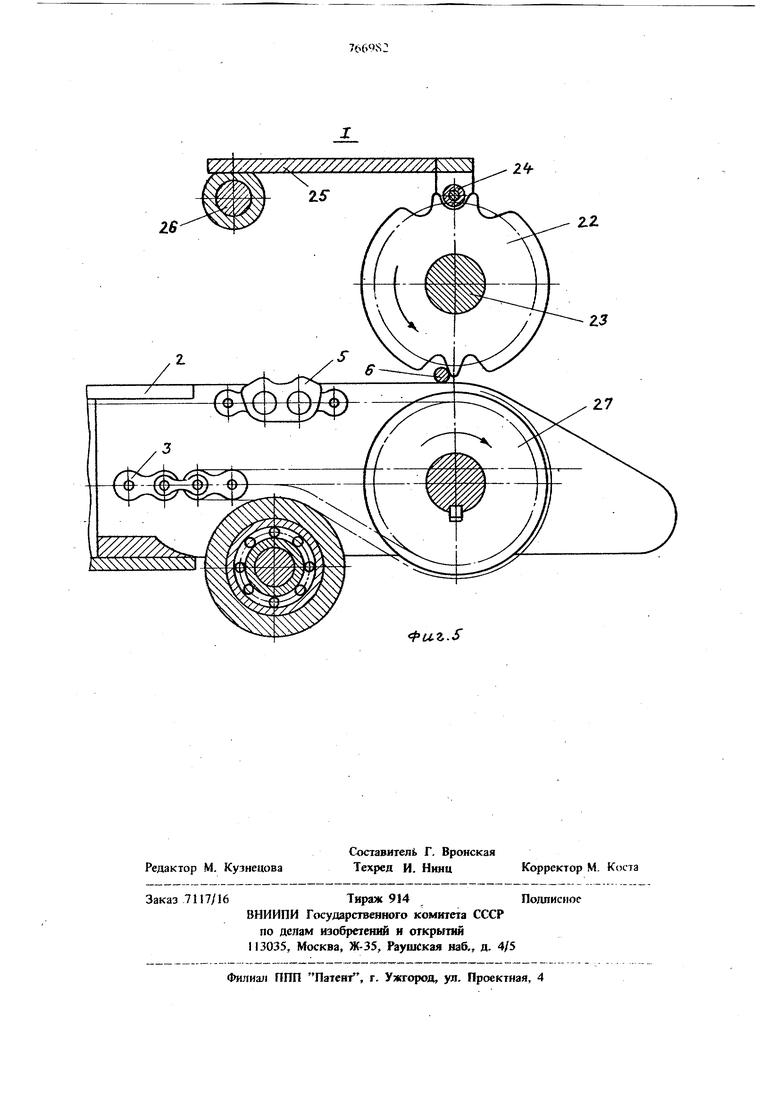
3 мы. Несущие элементы 5 на рабочем участке цепи размещены в незамкнутой части коЛтура направляющей 2 и выступают над ней на величину 0,8-2,5 высоты опорной части по1шески 6, чем обеспечивается захват подвесок 6 при их перемещений. Устройство содержит поворотную стрелу 7, горизонтальную ось 8, установленную на пластине 9, вертикальную ось поворота 10 и упор 11с уравновеишвающей пружиной 12. Стрела через закрепленную на ней планку 13 взаимодействует с датчиком 14 устройства отсчета количества принятых изделий, установленным на опоре 15, Поворотная стрела 7 установлена соосно с гравитащюнным спуском 16, который установлен соосно с направляющей 2 и выполнен в виде рамки с планкой 17. Гравитационный спуск щарнирно установлен на оси 18, уравновещен пружиной 19 и взаимодействует с датчиком перегрузки 20, закрепленным на опоре 15. Механизм выгрузки изделий содержит накопитель 21 и зубчатое колесо 22, установленное на оси 23. Зуб колеса 22 служит упором для подвески 6 изделия. Зубчатое колесо снабжено управляемым стопором 24, который через систему тяг 25, ось поворота 26 взаимосвязан с злектромагнитом. Движение тягового органа 3 осуществляется от привода через звездочку 2 Устройство для транспортирования и хранеНИН штучных изделий работает следующим образом. Включается система автоматики. Стрелу 7 поворотом вокруг вертикальной оси 10 устанавливают в рабочее положение, которому соответствует соосное положение стрелы 7, гравитационного спуска 16 и направляющей 2. Включением привода сообщают движение тяговому органу 3 через звездочку 27. Подвеска с изделием, перемещаемая из пошивочного цеха в склад раздаточным транспортером, снима ется стрелой 7. Под действием веса подаески с изделием стрела 7 поворачивается вокруг горизонтальной оси 8 до упора 11 и воздействует на датчик отсчета количества изделий. Затем подвеска 6 с изделием соскальзывает под действием собственного веса по стреле 7 на гравитационный спуск 16, а далее на напра ляющую 2. Несущие элементы 5 тягового орг на 3 подхватывают своей заходной частью и выемкой подвеску 6 с изделием и перемещают ее до упора, которым является зуб колеса 22. Упором для последующих перемещаемых подвесок служит предьщущая подвеска. Несущий элемент 5, переместив подвеску до упора приподнимает подвеску и проходит под ней. Подвеска ( с изле.чисм остается на natipaBяющей 2, охватывая ее по наружному контуру. По мере поступления подвесок 6 с издеием направляющая плотно заполняется до тех ор, пока две или три подвески 6 не окажутся на рамке гравитационного спуска 16. Под ействием веса подвесок 6 с изделиями гравитационный спуск 16 поворачивается вокруг оси 18, преодолевая сопротивление пружины 19, и воздействует через планку 17 на датчик перегрузки 20, который отключает привод устройства. Выгрузка подвесок с изделиями осуществляется следующим образом. Включением злектромагнита стопор 24 выводится из зацепления с зубчатым колесом. Включается тяговый орган 3, который несущими злементами 5 через подвески 6 воздействует на зуб колеса 22 и поворачивает ее. При зтом подвеска 6 с изделием освобождается и соскальзывает на накопитель 21. Выгрузка продолжается до тех пор, пока стопор 24 не будет введен в зацепление с зубчатым колесом 22. Формула изобретения 1.Устройство для транспортирования и хранения штучных грузов на подвесках, содержащее поворотную стрелу, гравитационнь1Й спуск и конвейер, вертикально-замкнутый тяговый орган которого смонтирован в полой направляющей с незамкнутым в поперечном сечении контуром и снабжен несущими злементами, установленными с возможностью взаимодействия с механизмом выгрузки изделия, отличающееся тем, что, с целью равномерной и полной загрузки зоны накопления конвейера, несущие злементы на рабочей ветви конвейера смонтированы выступающими над направляющей и выполнены с выемкой для размещения подвесок, а механизм выгрузки изделий снабжен зубчатым колесом, установленным с возможностью взаимодействия с несущими злементами, и управляемым стопором, контактирующим с впадинами зубьев. 2.Устройство по п. 1,отлнчающее с я тем, что поворотная стрела снабжена датчиком отсчета количества изделий. 3.Устройство по п. 1, о т л и ч а ю ш ее с я тем, что гравитационный спуск снабжен датчиком перегрузки. . ; Источники информации, принятые во внимание при зкспертизе 1. Организация и механизация складов готовых изделий на швейных предприятиях. 06зор ЦНИ11ТЭИ,М., 1969, с. 24-28 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования и хранения штучных изделий на подвесках | 1982 |
|
SU1025603A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Устройство для перегрузки изделий с подвесного грузонесущего конвейера | 1975 |
|
SU655610A1 |
| Устройство для поворота подвесок конвейера | 1978 |
|
SU781127A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| Устройство для загрузки подвесного конвейера | 1983 |
|
SU1152894A1 |
| ГРАВИТАЦИОННАЯ ШЛЮПБАЛКА | 1970 |
|
SU280252A1 |
| Устройство для перегрузки подвесок с подвесного конвейера | 1978 |
|
SU770951A1 |
| Устройство для съема изделий | 1979 |
|
SU810583A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ПОДВЕСОК ПОДВЕСНОГОКОНВЕЙЕРА | 1972 |
|
SU328045A1 |


Вид 6
IS
фиг.З
Вид В
Фиг..S
