(54) ЗАХВАТ МЕХАНИЧЕСКОЙ РУКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегатный станок | 1982 |
|
SU1042957A1 |
| Устройство для крепления деталейНА пРОВОлОКу | 1979 |
|
SU831882A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1988 |
|
SU1590290A2 |
| Классификатор полупроводниковых приборов | 1975 |
|
SU565338A1 |
| Устройство для загрузки металлорежущего станка | 1986 |
|
SU1360967A1 |
| УСТРОЙСТВО для УЛЬТРАЗВУКОВОЙ ПАНКИ КРИСТАЛЛОВ | 1973 |
|
SU393782A1 |
| Устройство для групповой укладки изделий в тару | 1990 |
|
SU1757956A1 |
| Автооператор | 1986 |
|
SU1364430A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
1
Изобретение относится к области радиоэлектроники и может быть использовано при сборке полупроводниковых
приборов,е
Известен захват механической руки, содержащий корпус, на котором установлен привод, соединенный с зажимными элементами l .
Орнако известное устройство не -л обеспечивает загрузку металлостеклянных корпусов полупроводниковых приборов в матрицы установки герметизации ...
Цель изобретения - расширение 15 функциональных воеможностей устройства.
Достигается это тем, что захват механической руки, преимущественно для перемещения полупроводниковых 20 приборов, содержащий корпус, на котором установлен привод, соединенный с зажимными элементами, снабжен кареткой, а один из зажимных элементов выполнен в виде толкателя и закреп- 25 -лен на корпусе неподвижно, при этом другие зажимные элементы установлены шарнирно на каретке с возможностью возвратно-поступательного перемещения относительно оси толкателя. 30
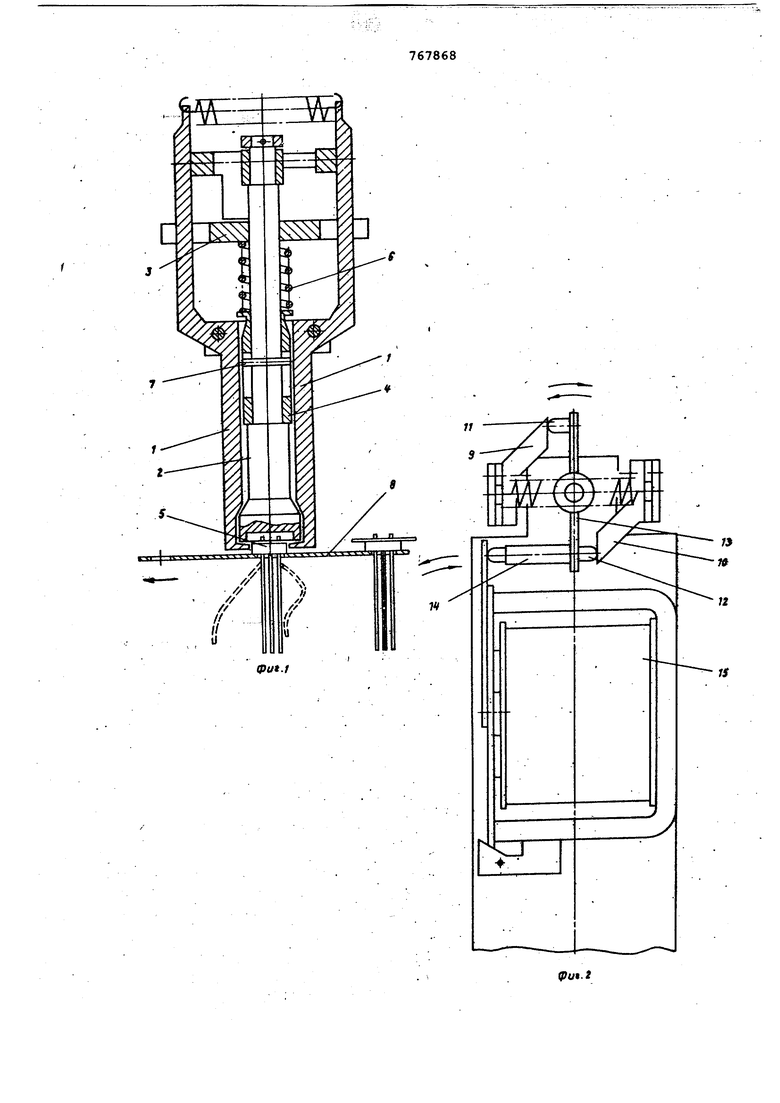
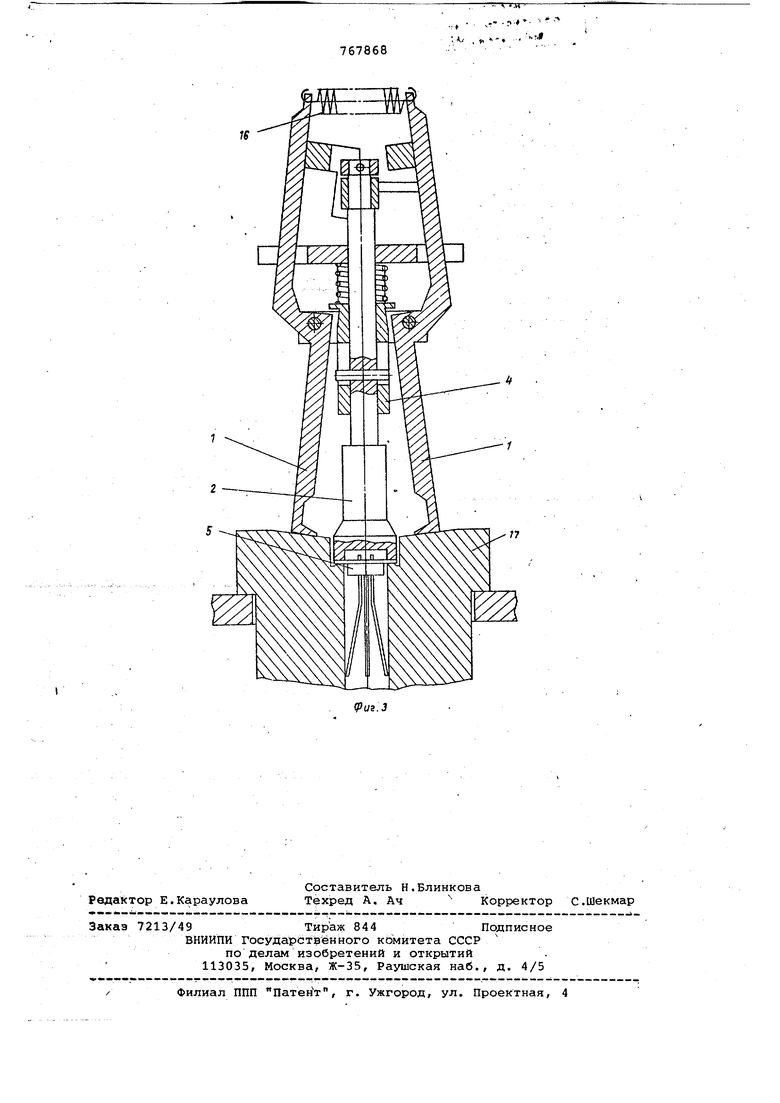
На фиг. 1 показан захват механической руки, общий вид; на фиг. 2 вид сверху; на фиг. 3 - рабочий момент захвата.
Захват механической руки состоит из подвижных зажимных элементов 1,кинематически связанных с приводом, зажимного элемента в виде толкателя 2, связанного жестко с корпусом 3 захвата каретки 4, имеющей возможность перемещения вдоль оси толкателя 2, которая перпендикулярна к плоскости контакта с захватываемым корпусом 5 прибора. Каретка 4 подпружинена пружиной 6. Штифт 7, заходящий в пазы каретки 4, предотвращает возможность ее проворачивания относительно оси толкателя 2. Корпус 5 прибора загружен в технологическую кассету 8. В верхней части зажимных элементов 1 закреплены упоры 9 и 10,о раб5чу.ю поверхность которых опираются толкатели 11 и 12, установленные на коромысле 13. Толкатель 14 связывает корокислй 13 с приводом 15. Таким образом кинематическая связь подвижных зажимных элементов 1 с приводом 15 осуществляется через упоры 9, 10, толкатели 11, 12, 14, коромысло 13.
В верхней части зажимные элементы 1 связаны пружиной 16, которая йри отключеннсял приводе 15 отводит зажимные элементы 1 от толкателя 2.
Устройство работает следующим образом.
Перед подводом захвата к корпусу 5 прибора привод 15 отключен. От пружины 16 через упоры 9 и 10 передается усилие на толкат.ели 12 и 11, под действие которого коромысло 13 повернуто вправо. При этом верхние части зажимных элементов 1 сведены навстречу друг другу, а нижние части отведены от толкателя 2 каретка 4 . под воздействием пружины 6 занимает нижнее положение. Рабочая поверхность толкателя 2 становится на корпус 5 прибора, который загружен в технологическую кассету 8. Включается привод 15, который перемещает толкатель 14, в результате корс 1ысло 13 поворачивается влево, при этом толкатели 11 и 12 воздействуют на упоры 9 и 10, пружина 16 растягивается эажимные элементы 1 подводятся к толкателю 2, охватывая корпус 5 прибора за нижнюю поверхность его буртика.
Движением захвата механической руки вверх корпус 5 извлекается из технологической кассеты 8 несмотря на то, что отдельные гибкие выводы, деформированные на предыдущих операциях, могут препятствовать этому. Далее захват механической руки с корпусом 5 подводится к матрице 17 ус. тановки герметизации. В отверстие матрицы 17 первоначально заводятся гибкие выводы корпуса 5. В непосредственной близости захвата от внешней поверхности матрицы 17 привод 15 отключается, пружина 16 отводит зажимные элементы 1 от корпуса 5,- который удерживается на своем месте гибкими выводами, Эс1веденными в отверстие матрицы 17. При последующем перемещении захвата вниз зажимные ты 1 опираются о наружную поверхность матрицы 17 и останавливаются, а толкатель 2 досылает корпус 5 в углубление матрицы до контакта с рабочей поверхностью. При этом толкатель 2 перемещается относительно зажимных элементов 1. В конце хода каретка 4 занимает верхнее положение относительно толкателя 2. Механической рукой захвату сообщается движение вверх, пружина 6 возвращает каретку 4 в исходное положение.Захват .подготовлен к загрузке следующей детали.
Формула изобретения
Захват механической руки, преимущертвенно для переметцения полупроводниковых приборов, содержащий корпус, на котором установлен привод, 5 соединённый с зажимными элементами, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен кареткой, один из зажимных элементов выполнен в виде толкателя, и закреплен на корпусе неподвижно, при другие зажимные элементы установлены шарнирно на каретке с возможностью возвратно-поступательного перемещения относительно оси толкателя.
Источники информации принятие во внимание при экспертизе
i
W
