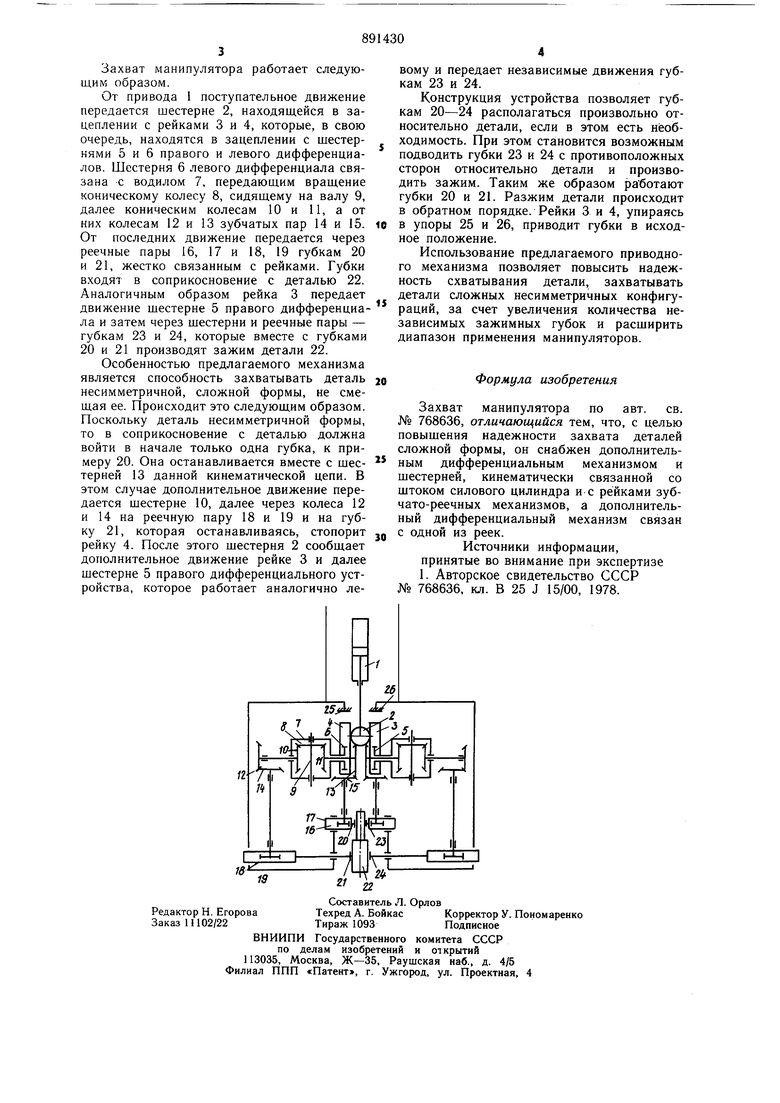
(54) ЗАХВАТ МАНИПУЛЯТОРА Изобретение относится к машиностроению, а точнее к захватным устройствам руки промышленных роботов или манипуляторов. По основному авт. св. № 768636 известен захват манипулятора, содержаший дифференциальный механизм, кинематически связанный с приводом и с губками, снабженный по числу губок зубчато-реечными механизмами и силовым цилиндром, на штоке которого расположены упоры, причем рейки зубчато-реечнь1х механизмов расположены напротив упоров, а зубчатые колеса этих механизмов связаны каждое с ведущим зубчатым колесом дифференциального механизл5а 1. Недостатком известного устройства является низкая надежность при захвате деталей сложной формы. Цель изобретения - повышение надежности захвата деталей сложной формы. Для достижения поставленной цели захват манипулятора снабжен дополнительным дифференциальным механизмом и шестерней, кинематически связанной со штоком силового цилиндра и с рейками зубчато-реечных механизмов, а дополнительный дифференциальный механизм связан с одной из реек. На чертеже показана кинематическая схема захвата манипулятора. Приводное устройство состоит из приводного силового цилиндра 1, поршень которого соединен с шестерней 2, взаимодействующей с рейками 3 и 4, которые кинематически связаны посредством зубчатых колес 5 и 6 с правой и левой дифференциальными передачами, являющимися идентичными и состоящими из водила 7 левого дифференциала, жестко связанного с колесом 6, и конического колеса 8. На водиле расположен вал 9. Колесо 8 соединено с колесами 10 и 11, которые связаны жестко с колесами 12 и 13. Последние соединены с коническими колесами 14 и 15, которые связаны с реечными парами 16, 17 и 18, 19. К рейкам 17 и 19 присоединены губки 20 и 21 зажима детали 22. Правая дифференциально-зубчатая передача состоит из аналогичных элементов с реечным колесом 5 и губками зажима 23 и 24. Приводное устройство захвата манипулятора снабжено упорами 25 и 26 возврата реек 3 и 4 в исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1978 |
|
SU768636A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Схват манипулятора | 1983 |
|
SU1093548A1 |
| Грейферное устройство для перемещения заготовок к многопозиционному прессу | 1986 |
|
SU1349854A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
