(54) РАБОЧИЙ РОТОР ДЛЯ АВТОМАТИЧЕСКИХ РОТОРНО-КОНВЕЙЕРНЫХ ЛИНИЙ


| название | год | авторы | номер документа |
|---|---|---|---|
| Роторная машина | 1976 |
|
SU617289A1 |
| Ротор для смыкания и размыкания комплекта инструментов | 1988 |
|
SU1590393A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1217741A1 |
| Ротор передачи | 1980 |
|
SU867605A1 |
| Роторная машина | 1982 |
|
SU1038253A1 |
| Рабочий ротор автоматических роторных линий | 1985 |
|
SU1320078A1 |
| Роторно-конвейерная машина | 1981 |
|
SU1016208A1 |
| Роторно-конвейерная машина | 1987 |
|
SU1532300A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1118516A1 |
Изобретение относится к области куэнечно-предсового машиностроения, а именно к конструкциям рабочих роторов для автоматических роторно- 5 конвейерных линий.
Известен рабочий ротор, содержащий неподвижный цилиндрический кулачок, приводный вал со смонтированным на нем барабаном, по периферии кото- JQ рого расположены управляемые от распределителя гидравлические цилиндры, каждый шток которых соединен с рабочим инструментом и снабжен роликом, взаимодействуквдим с профилем непод- е вижного цилиндрического кулачка {.
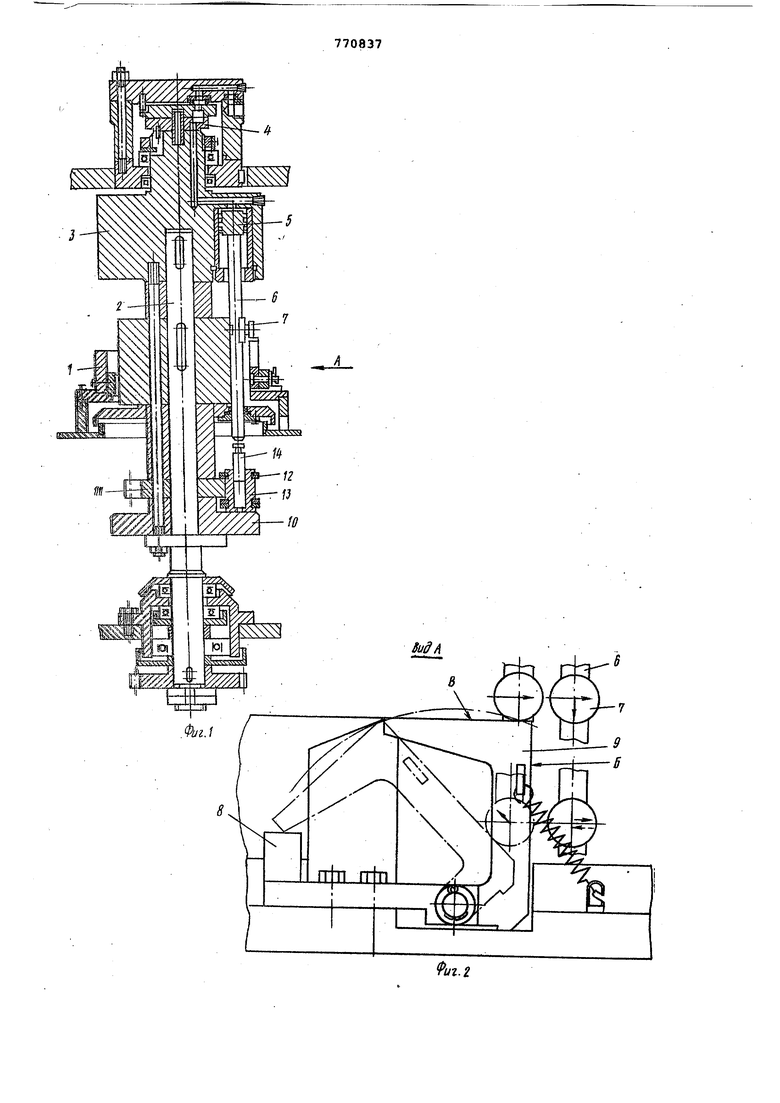
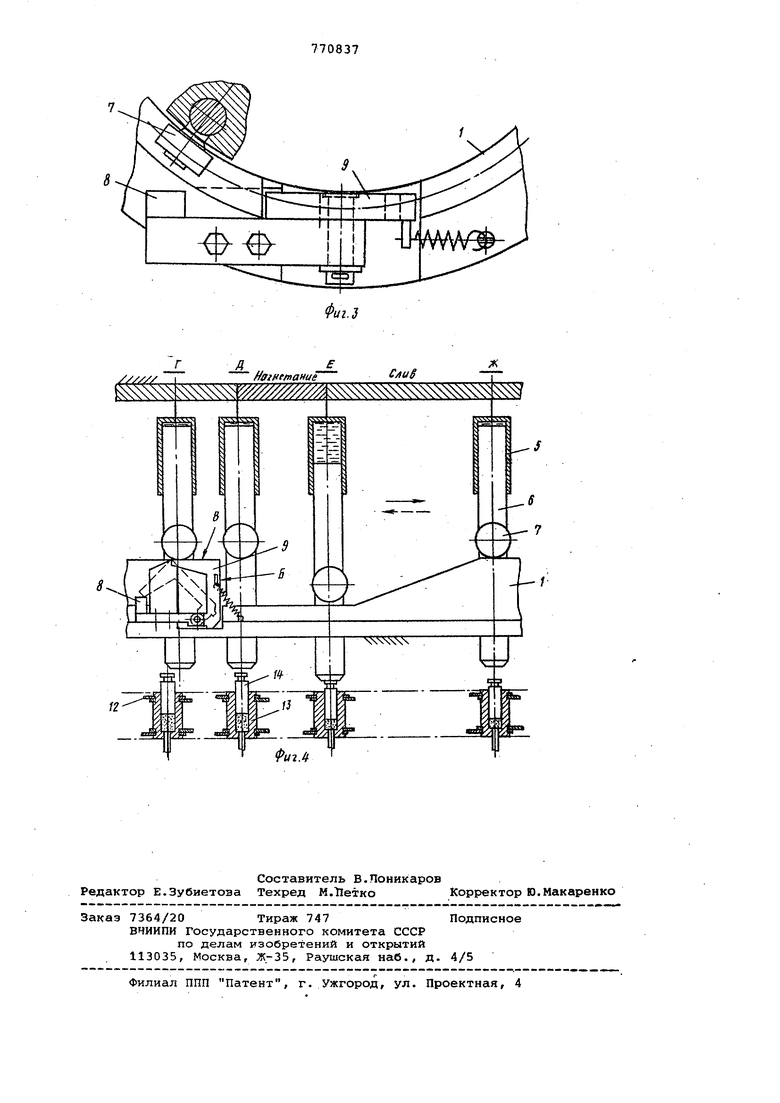
Такие рабочие роторы получили название роторы с гидромеханическим приводом исполнительных органов. При работе такиу. роторов вспомогательный 20 ход штоков цилиндров выполняется при помощи цилиндрического кулачка, а непосредственно силовая операция при помощи гидроусилия- силовых цилиндров, что позволяет увеличить КПЦ 25 , гидропривода, и упростить его конструкцию. Однако вследствие такой конструкции ротора при его эксплуатации необходимо добиться четкого взаимодействия профиля кулачка и распределитеЛЯ гидроцилиндров, что приводит к следующим трудностям при эксплуатации таких роторов, Профиль кулачка в месте, соответствующем выполнению силовой операции гидроцилиндрами, должен иметь наклонный участок для обеспечения опускания взаигодействующих с ним штоков. Но при внезапном останове машины (например поломке), гидропривод некоторое время продолжает еще действовать, что приводит к тому, что усилие прессовой операции передается через ролики штоков на наклонный профиль кулачка. Такие ситуа:ции неоднократно возникали в практике эксплуатации таких роторов и приводили к их серьезной поломке (срезание роликов, раскол кулачка и т.д.). Для устранения этого недостатка профиль кулачка непосредственно в месте совершения силовой операции должен содержать впадину в форме прямоугольного уступа (т.е. отсутствовать). Однако при такой конструкции ротора исключено реверсное вращение ротора, так как ролик штоков, находящийся в зтой впгщине, не позволяет сделать поворот ротора назад, так как он упирается в профиль кулачка. Реверсный Же поворот ротора крайне необходим при наладочных работах с ротором на пример, при обеспечении соосности рабочего инструмента с держателями изделий). Указанный недостаток приводил к тому, что рабочие при наладочны работах вынуждены были для обеспечения поворота назад роторов отключать гидропривод и поднимать штоки, находящиеся в указанной впадине кулачка, при помощи ломиков. Учитывая, что в роторной машине находится около шести подобных рабочих роторов, связанных жесткой кинематической свя зью, такая операция вызывает труднос ти и требует привлечения нескольких единицобслуживающего персонала. Известна конструкция рабочего ротора для автоматических роторно-конвейерных линий, содержащего неподвижный цилиндрический кулачок, приводной вал со смонтированным на нем барабаном, по периферии которого рас положены управляемые от распределителя гидравлические цилиндры, каждый шток которых снабжен роликом, взаимодействукяцим с профилем неподвижного цилиндрического кулачка 2. Данное устройство является наибо,лее близким к изобретению по техниче кой сущности и достигаемому результа ту. Недостатком известного ротора, также как и описанного выше, является сложность обслуживания, так как у него затруднено по тем же причинам реверансе вращение ротора. Целью изобретения является улучшение обслуживания ротора за счет обеспечения его реверсного поворота во время наладки или аварийной ситуации при работе. Для достижения цели в роторе част кулачка, предшествующая участку кулачка, соответствующему силовой операции, выполнена в виде подпружиненного уголкового профиля, одна сторона которого шарнирно закреплена на кулачке, выполнена параллельной оси штоков, а вторая - перпендикулярной оси штоков и взаимодействующей с роликами штоков, при этом кулачок выполнен с опорной пя:той, взаимодействующей с уголковым профилем. Такое выполнение рабочего ротора обеспечивает реверсное вращение рото ра, В такой конструкции ротора при обычной его работе ролик штока взаимодействует со стороной уголкового профиля, которая перпендикулярна оси штоков. При реверснрм вращении рото ра ролик штока, находящегося в выемк профиля кулачка, нажимает на сторон уголкового профиля, которая паралле на оси штоков, и тем самым поворачи вает уголок до его опоры в пяту. Пр чем та сторона, которая при обычной работе ротора является неработающей образует,теперь опорную наклонную по верхность профиля кулачка,по которой ролик штока возвраадается вверх на предшествующий участок кулачка. На фиг. 1 изображен рабочий ротор, поперечный разрезJ на фиг. 2 - фрагмент, поясняющий работу ротора (вид А на фиг. 1); на фиг. 3 тот же фрагмент, вид в плане; на фиг. 4 циклограмма работы ротора. Рабочий ротор содержит неподвижный цилиндрический кулачок 1, приводной вал 2 со смонтированным на нем барабаном 3, по периферии которого расположены управляемые от распределителя 4 гидравлические цилиндры 5, каждый шток б которых снабжен роликом 7,взаимодействующим с профилем неподвижного цилиндрического кулачка 1. Часть кулачка 1, предшествующая участку кулачка, .соответствующему силовой операции штоков б, цилиндров 5, выполнена в виде подпружиненного уголкового Г- образного профиля, одна сторона Б которого шарнирно закреплена на кулачке Л и параллельна оси штоков б,а вторая В - перпендикулярна оси штоков б и взаимодействует с роликами 7 штоков б, причем кулачок 1 снабжен опорной пятой 8, взаимодействующей с уголковым прОЪилем 9. при реверсном вращении ротора. Ротор содержит также опорный диск 10 и звездочку 11, которая сцеплена с цепным конвейером 12, в шарнирах звеньев которого находятся матрицы 13 со вставленными пуансонами 14. Рабочий ротор для автоматических роторно-конвейерных линий работает следующим образом. При включении в работу ротор приходит в непрерывное вращение от при-вода линии (на фигурах не показано ) . Конвейер 12 транспортирует матрицы 13с насыпанным в них порошком и вставленными пуансонами 14 к ротору, где конвейер 12 сцеплен с ним по дуге, на которой комплекты пуансонов 14и матриц 13 располагаются соосно штокам б цилиндров 5. Операции, засыаки порошка и вставки пуансонов 14 осуществляются в других роторах автоматической роторно-конвейерной линии (на фигурах не показано). На участке ГД происходит вписывание цепи конвейера 12 в зону его закрепления с ротором. На этом участке ролик 7 соответствующего штока б катится по профилю неподвижного цилиндрического кулачка 1, в том числе по стороне В уголкового профиля 9. В Точке Д комплект матрицы 13 и пуансона 14 устанавливается соосно штоку б. На этом участке происходит силовая операция. Шток б под действием гидроцилиндра 5, управляемого от распределения 4,двигается вниз и, воздействуя на пуансон 14 совершает технологическую операцию прессования порошка в таблетку. В этом месте к улачок i выполнен в виде выступа, кото$5ый представляег собой уголковый профиль 9. Ролик 7 опускается вместе со штоком б параллельно стороне Б уголкового профиля. Его опускание заканчивается в точке Е, что соответствует окончанию силовой операции после этого ролик 7 наезжает на восходящий участок кулачка 1 и поднимается вверх. При этом совершается обратный ход штока 6 цилиндра 5, Кулачок 1 при этом гарантирует возврат штока б в исходное положение. Возвра штока заканчивается в точке Ж. Затем ролик 7 штока б перемещается по контуру до точки Г, после чего его рабочий цикл штока б повторяется. При наладочных работах необходимо совершить реверсный поворот ротора, при этом ролик 7 штока б, находящийся во впадине ДЕ кулачка, нажимает на поверхность Б уголково го профиля 9.От этого воздействия пр филь 9 поворачивается на своем шарнир ном креплении до упора его верхней стороны В в пяту 8.При таком полож нии его сторона Б, которая при обычной работе ротора является нерабочей частью кулачка, становится в наклонное положение, и ролик 7 штока б перемещается по ней в обратном направлении. Как только ролик 7 сойдет со стороны Б профиля 9, он под дей ствием своей пружины возвратится в исходное положение. При последующем реверсивном вращении ротора следующий ролик 7 штока б совершит аналогичные манипуляции. После прессования таблеток матрицы 13 с пуансонами 14транспортируются конвейером 12 к другим роторам машины (на фигурах не показано), где происходит вынимание пуансона и удаление таблеток. Использование конструкции рабочего ротора по предлагаемому изобретению для автоматических роторноконвейерных линий позволит облегчить &ГО обслуживание и монтаж. Раньше для выполнения реверсного хода при наладочных работах на зту операцию затрачивалось прмерно 2 ч и требовалось несколько рабочих, а сейчас на эту операцию уходит несколько минут. Рабочий включает элект-. рокнопкой прерывистое реверсное вращение электродвигателя и поворачивает ротор в необходимое положение, что позволяет получить годовую экономию порядка 2,5 тыс. руб. Экономия получена за счет сокращения рабочего времени на монтаж и наладку линий, а так .е за счет сокршцения обслуживающего персонала. Формула изобретения Рабочий ротор для автоматических роторно-конвейерных линий, содержащий неподвижный цилиндрический кулачок с силовым участком, приводной вал со смонтированным на нем барабаг ном, по периЛерии которого .расположены гидравлические цилиндры, на каждом из которых установлен ролик, взаимодействующий с неподвижным кулачком, отличающийся тем, что, с целью улучшения обслуживания ротора за счет обеспечения его реверсивного поворота во время наладки или при аварийной ситуации, часть кулачка, предшествующая силовому участку кулачка, выполнена в виде подпружиненного уголка, одним концом шарнирно, закрепленного на кулачке параллельно оси штоков, а другим концом, перпендикулярным оси штоков, взаимодействующим с роликами штоков, при этом кулачок снабжен опорной пятой, взаимодействующей с уголком. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 124786, кл. В 23 Р 23/00, 1959. 2.Кошкин Л.Н. Комплексная автоматизация производства на Зазе роторных линий. М., Машиностроение, с. 68, рис. 52, 1972 (прототип).
JL J JLя,„.
Нагнетание o
Л
