Изобретение относится к области мащи- ностроения и может быть использовано в I роторно-конвейерных линиях для выполнения I прессовых и других операций. I Цель изобретения - повышение эффек- |тивностн использования инструмента. I На фиг. 1 показан ротор для смыкания и размыкания комплекта ннструментов; на фиг. 2 - манипулятор; на фиг. 3 - разрез А-А на фиг. 2 (торцовая стенка корпуса манипулятора (экстрактор); на фнг. 4 - манипулятор с силовым размыканием;- на фиг. 5 - схема входа хвостовика инструмента в цилиндрическое гнездо манипулятора; на фиг. б - положение хвостовика инструмента в цилиндрическом гнезде манипулятора перед выталкиваннем готового из- |делня; на фиг. 7 - то же, после выталки- |Вання готового изделия; на фиг. 8 взаимное расположение частей манипулятора перед 1ВЫХОДОМ из цилиндрического гнезда хвос- товика инструмента; на фиг. 9 - вид Б на 1ФИГ. 4; на фнг. 10 - разрез В-В на фиг. 9. I Ротор для смыкания и размыкания комп- |лекта инструментов состоит из установлен- iHoro в подщипннках центрального вала 1 с ;жестко закрепленными на нем центральной 2 н боковыми 3 звездочками, наружными верхним 4, нижним 5 и внутренними верхним 6 и нижним 7 барабанами. Центральная звездочка 2 в определенном секторе несет конвейер матриц 8, боковые звездочки 3 несут конвейеры верхних 9 и нижних 10 пуансонов. В гнездах наружных барабанов 4 и 5 установлены верхние 11 и нижние 12 ползуны, консольные ролики которых размещены в фигурных прорезях неподвижных верхнего 13 и нижнего 14 кулачков, укрепленных в верхнем 15 и нижнем 16 стаканах станины 17.
Соосно ползунам II и 12 в гнездах внутренних барабанов 6 и 7 размещены верхние 18 и нижние 19 манипуляторы, хвостови- ки которых, имеющие проточку, введены в- ложки ползунов И и 12.
На станине 17 закреплены дополнительные кулачки 20-22.
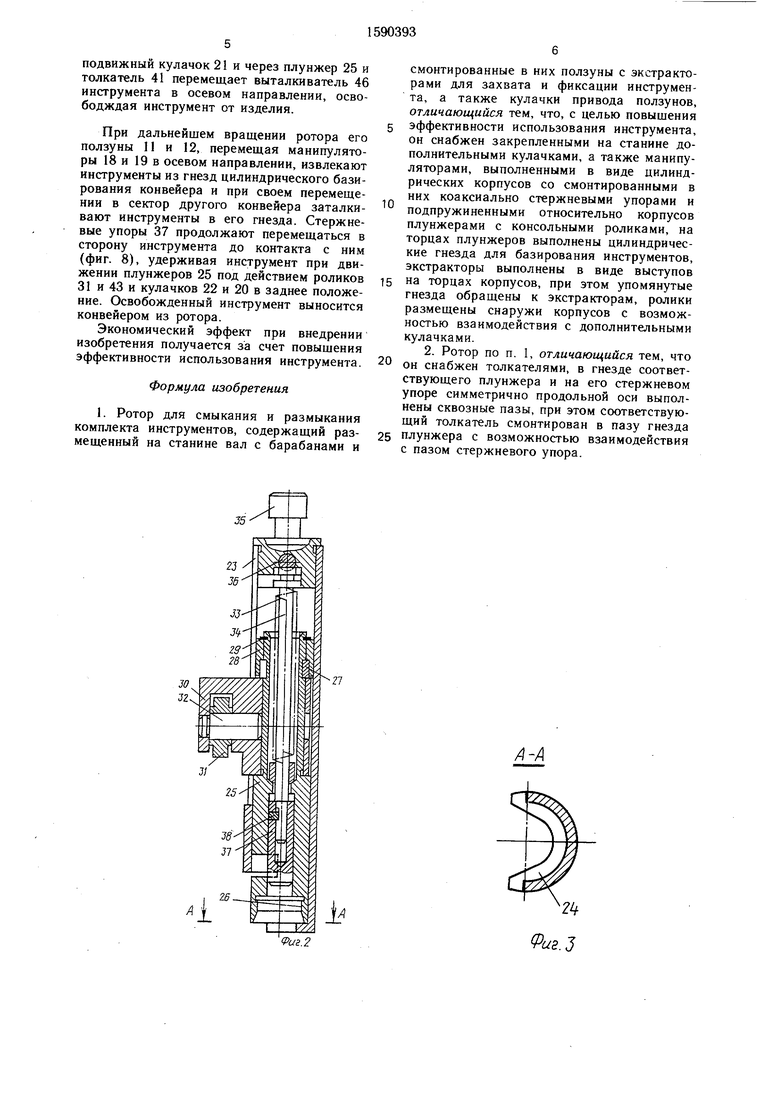
Манипулятор состоит из корпуса 23, на торцовой стенке которого выполнен экстрактор в внде выступа 24. Внутри корпуса 23
Коаксиально ему расположен подвижный плунжер 25., имеющий в передней части, обращенной к экстрактору, цилиндрическое гнездо 26. На плунжере 25 посредством полуколец 27, кольца 28 и пружинного кольца 29 закреплена обойма 30 с роликом 31,
сидящим на оси 32. Плунжер 25 прижимается к экстрактору 24 корпуса 23 посредством пружины 33, опирающейся через щтырь
34на хвостовик 35, связанный с корпусом 23 посредством щтнфта 36. Внутри плунжера 25 размещен стержневой упор 37, связанный посредством щпонки 38 со щтырем 34, . прижимаемым пружиной 33 через хвостовик
35к корпусу 23.
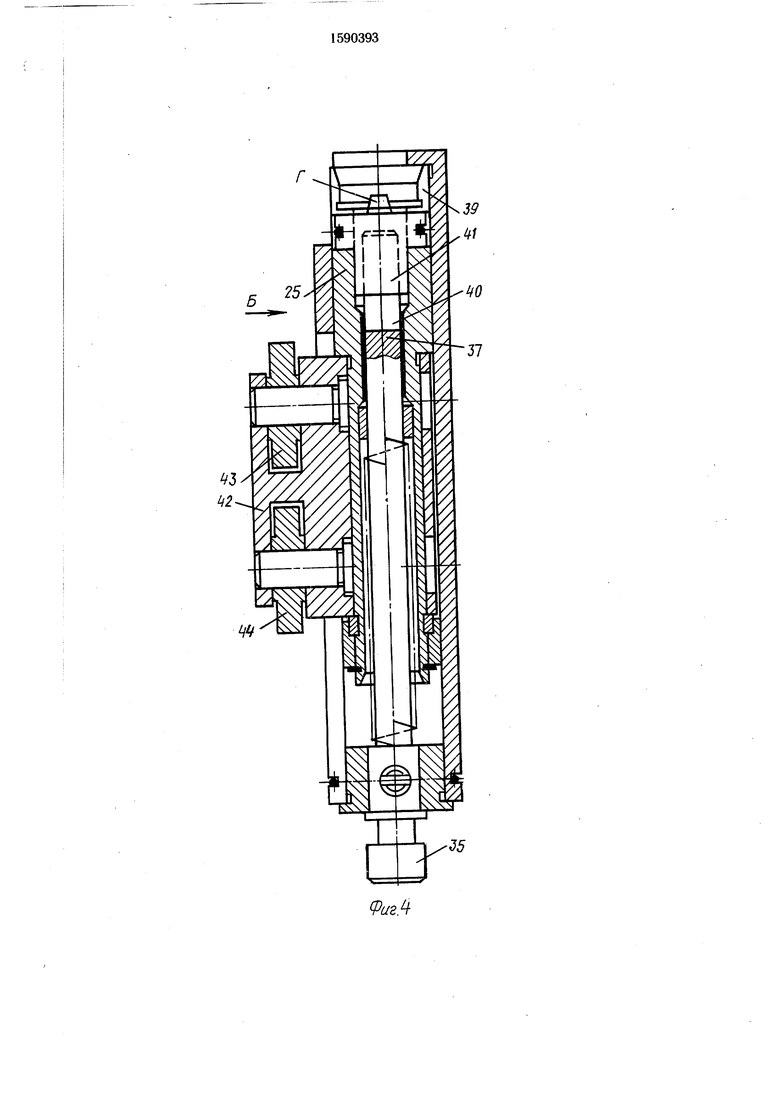
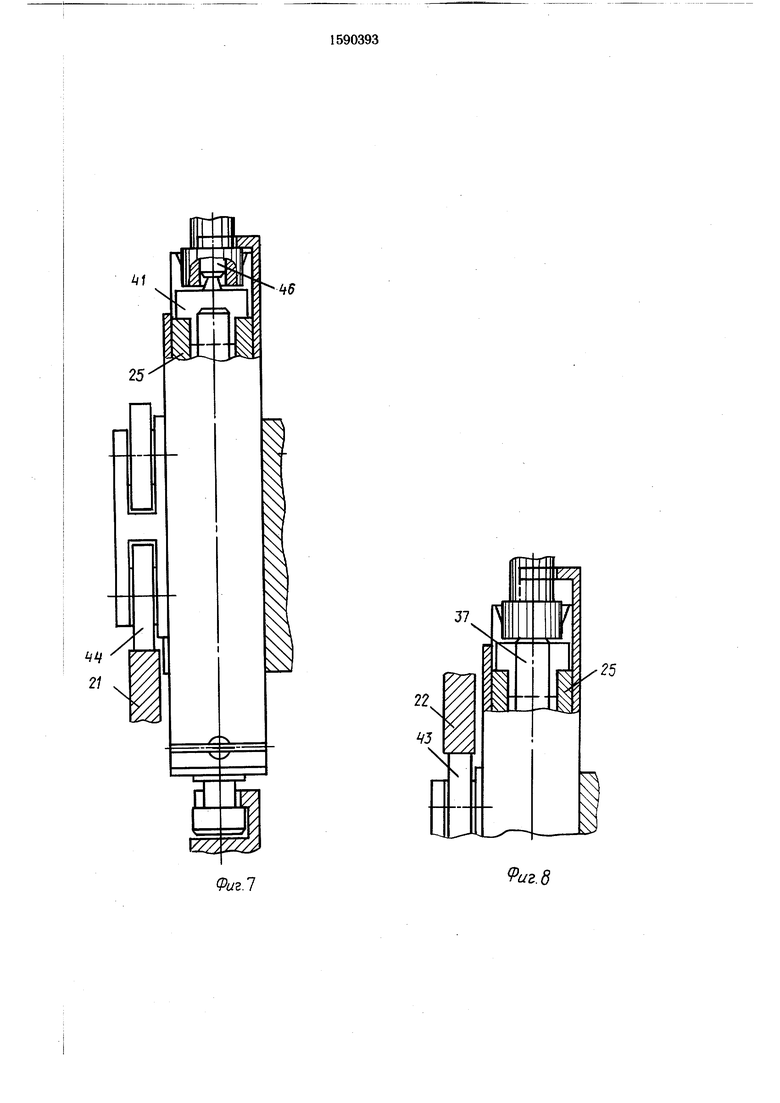
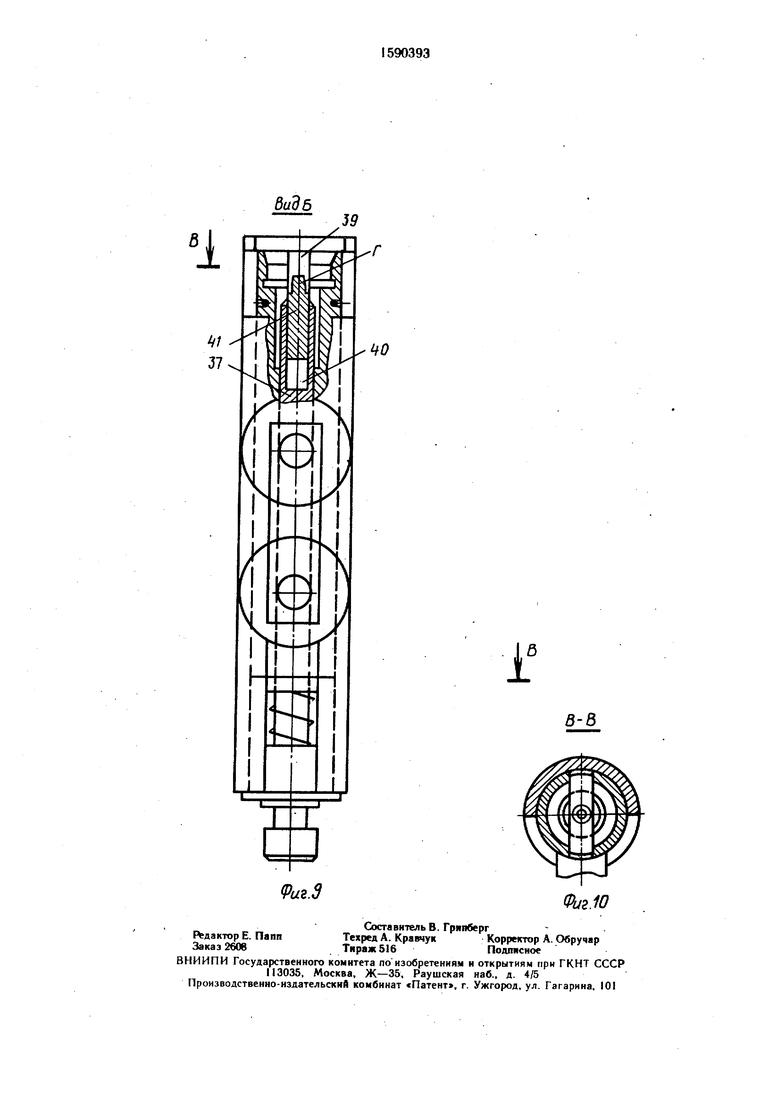
Для выталкивания изделия из инструмента в манипуляторе ротора размыкаиия
(фиг. 4) в торцах Подвижных плунжеров 25 стержневых упоров 37 в зонах цилиндрических гнезд выполнены симметрично продольной оси сквозные пазы 39 и 40, а плунжеры 25 снабжены толкателямн 41, установ- лелными в пазах 39 и 40 и взаимодейсгвующимн с пазами стержневых упоров 37. На обойме 42 установлены ролики 43 и 44. Инструмент имеет хвостовик 45 и выталкиватель 46. В роторе смыкания комплекта инструментов верхние 18 и нижние 19 манипуляторы выполнены по основному варианту (фиг. 2), а в роторе размыкания один или оба манипулятора выполнены по дополнительному варианту (фиг. 4).
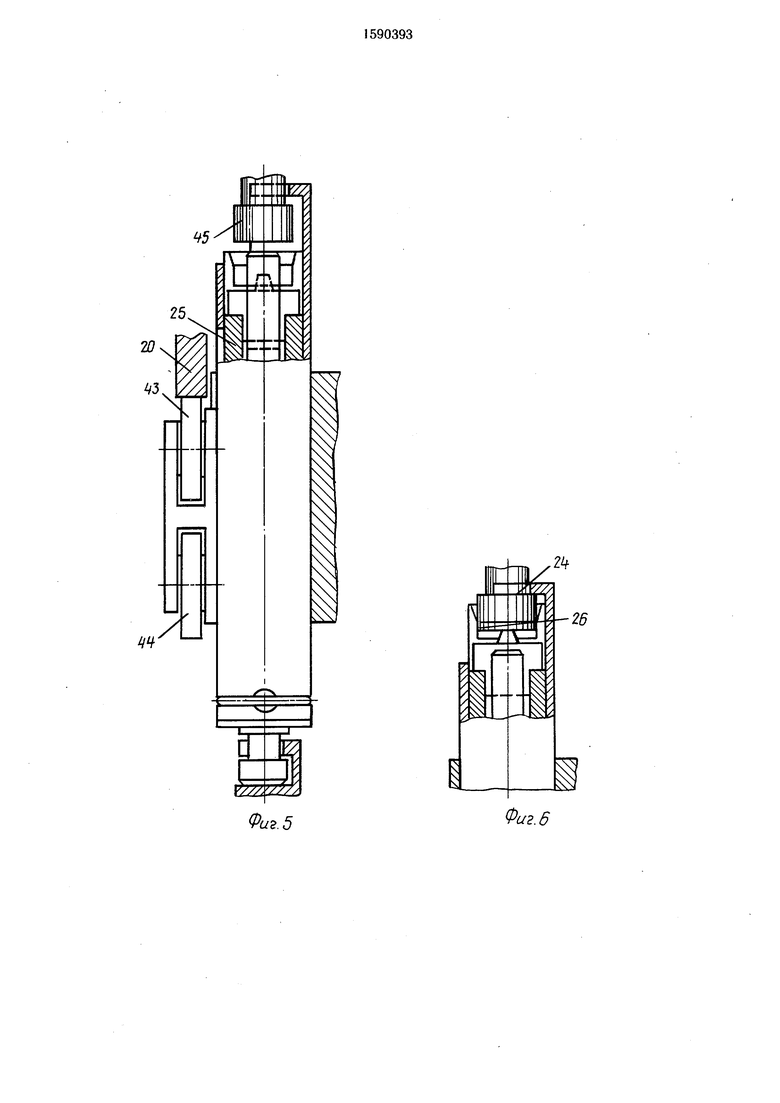
Ротор работает следующим образом. При вращенин ротора манипуляторы 18
и 19 приходят в сектор раскрытия, ролики 31 и 44 набегают на неподвижные кулачки 22 и 20 и под их воздействием отводят плунжер 25 в заднее положение. При приходе в ротор конвейера хвостовик 45 инструмента вписывается в раскрытый манипулятор,
ролик 31 сходит с неподвижного кулачка 22, плунжер 25 под действием пружины 33 перемещается в переднее положение, захваты- вает хвостовик 45 инструмента внутрь цилиндрического гнезда 26 н прижимает его к выступу 24 корпуса.
В- случае раз мыкания инструментов с предварительным выталкиванием издел ия ролик 44 манипулятора 19 набегает на неподвижный кулачок 21 и через плунжер 25 и толкатель 41 перемещает выталкиватель 46 инструмента в осевом направлении, осво- бодждая инструмент от изделия.
При дальнейшем вращении ротора его ползуны 11 и 12, перемещая манипуляторы 18 и 19 в осевом направлении, извлекают инструменты из гнезд цилиндрического базирования конвейера и при своем перемещении в сектор другого конвейера заталкивают инструменты в его гнезда. Стержневые упоры 37 продолжают перемещаться в сторону инструмента до контакта с ним (фиг. 8), удерживая инструмент при движении плунжеров 25 под действием роликов 31 и 43 и кулачков 22 и 20 в заднее положение. Освобожденный инструмент выносится конвейером из ротора.
Экономический эффект при внедрении изобретения получается за счет повыщения эффективности использования инструмента.
Формула изобретения
1. Ротор для смыкания и размыкания комплекта инструментов, содержащий размещенный на станине вал с барабанами и
смонтированные в них ползуны с экстракторами для захвата и фиксации инструмента, а также кулачки привода ползунов, отличающийся тем, что, с целью повыщения
5 эффективности использования инструмента, он снабжен закрепленными на станине дополнительными кулачками, а также маиипу- ляторами, выполненными в виде цилиндрических корпусов со смонтированными в
Q них коаксиально стержневыми упорами и подпружиненными относительно корпусов плунжерами с консольными роликами, на торцах плунжеров выполнены цилиидри чес- кие гнезда для базирования инструментов, экстракторы выполнены в виде выступов
5 на торцах корпусов, при этом упомянутые гнезда обращены к экстракторам, ролики размещены снаружи корпусов с возможностью взаимодействия с дополнительными кулачками.
2. Ротор по п. 1, отличающийся тем, что он снабжен толкателями, в гнезде соответствующего плунжера и на его стержневом упоре симметрично продольной оси выполнены сквозные пазы, при этом соответствующий толкатель смонтирован в пазу гнезда 5 плунжера с возможностью взаимодействия с пазом стержневого упора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопоточная рабочая машина непрерывного действия | 1977 |
|
SU732147A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1217741A1 |
| Роторная машина | 1983 |
|
SU1110666A1 |
| Роторная машина | 1976 |
|
SU617289A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Роторно-конвейерная машина | 1981 |
|
SU1016208A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
Изобретение относится к машиностроению и может быть использовано в роторно-конвейерных линиях при выполнении прессовых и других операций. Цель изобретения - повышение эффективности использования инструмента. Ротор содержит размещенный в станине 17 вал 1 с барабанами 4-7 и смонтированными в них ползунами 11 и 12 с приводом от кулачков 13 и 14. Он снабжен манипуляторами 18, 19 и дополнительными кулачками 20-22. Манипуляторы 18, 19 выполнены в виде цилиндрических корпусов со смонтированными в них коаксиально стержневыми упорами и под пружинными плунжерами с консольными роликами, контактирующими с дополнительными кулачками 20-22. На торцах плунжеров выполнены гнезда для базирования инструментов. На торцах корпусов выполнены экстракторы в виде выступов. Под действием кулачков плунжеры перемещаются, фиксируют инструмент и обеспечивают удаления и установку инструмента из соответствующих конвейеров. 1 з.п. ф-лы, 10 ил.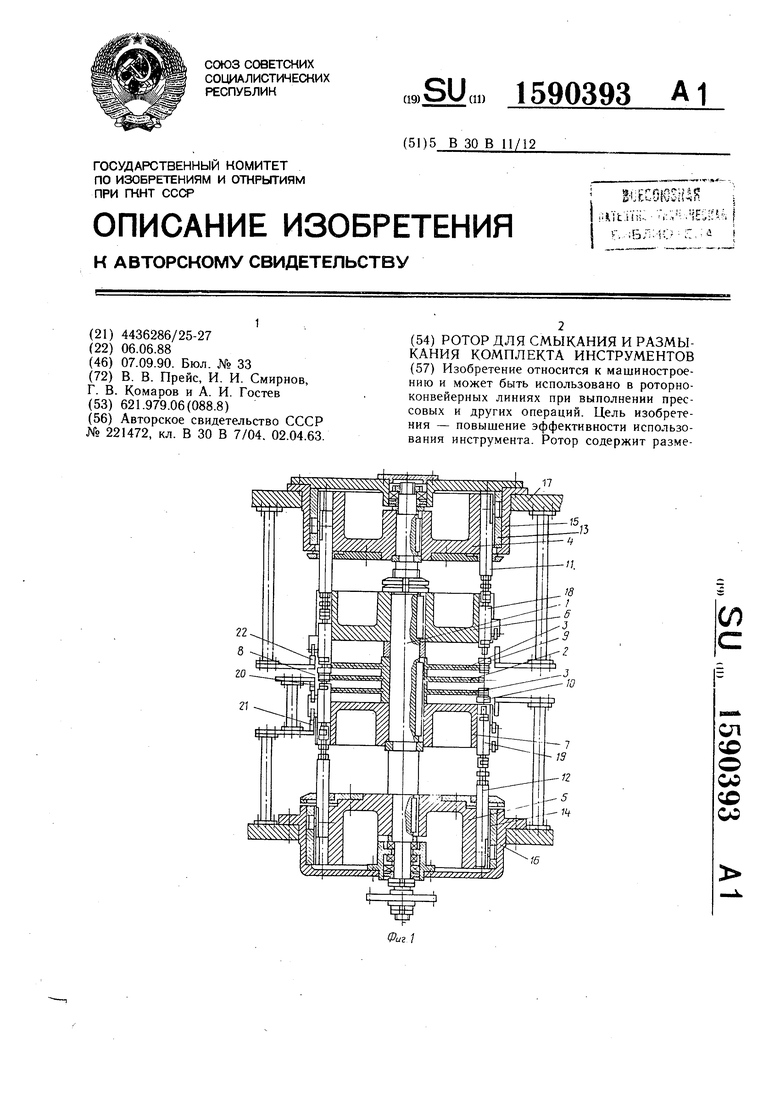
Риг. 2
ФигЯ
Л
YZZZi
Фиг. 5
Фиг. 6
f
9иг.1
J7
аг.8
(раг.З
5-8
Фиг.Ю
| Роторная машина для выполнения,например,прессовых операций | 1963 |
|
SU221472A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
