(54) ЗАХВАТНОЕ УСТГОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1977 |
|
SU660917A1 |
| УСТРОЙСТВО для СОРТИРОВКИ И УКЛАДКИ В НАКОПИТЕЛИБРЕВЕН | 1968 |
|
SU207111A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Грузозахватное устройство | 1978 |
|
SU747803A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| Автоматическая литейная линия | 1985 |
|
SU1416269A1 |
| Машина для отделочных работ | 1987 |
|
SU1498899A1 |
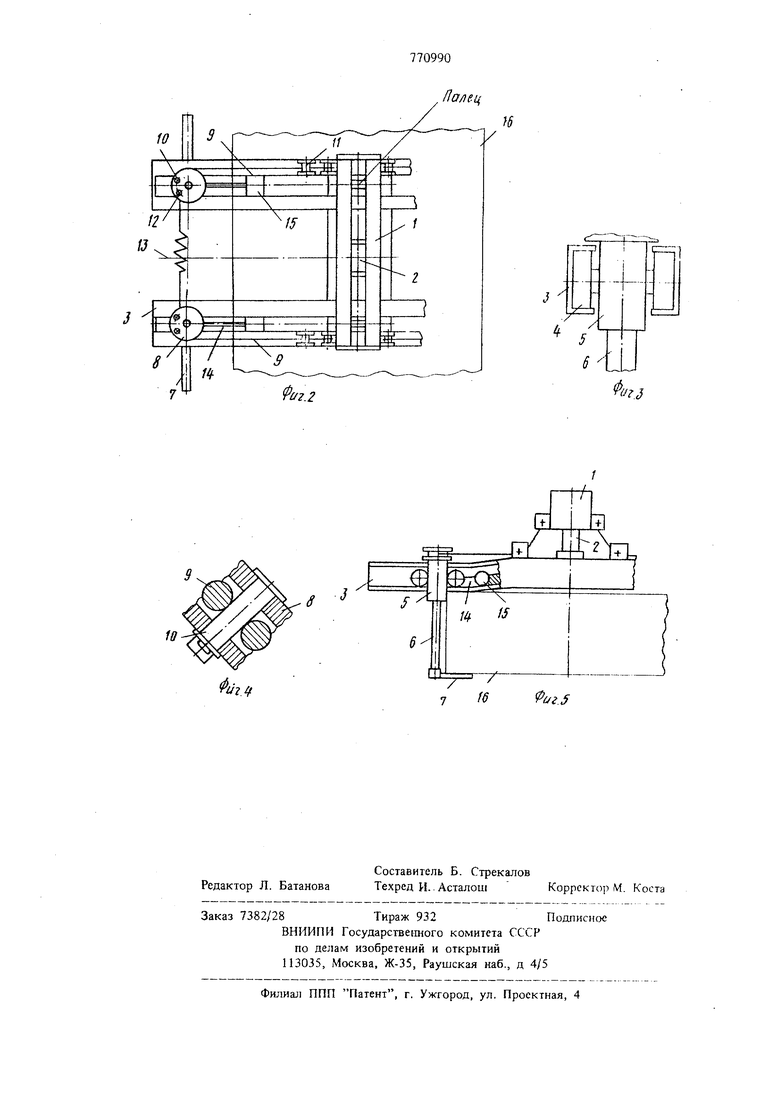
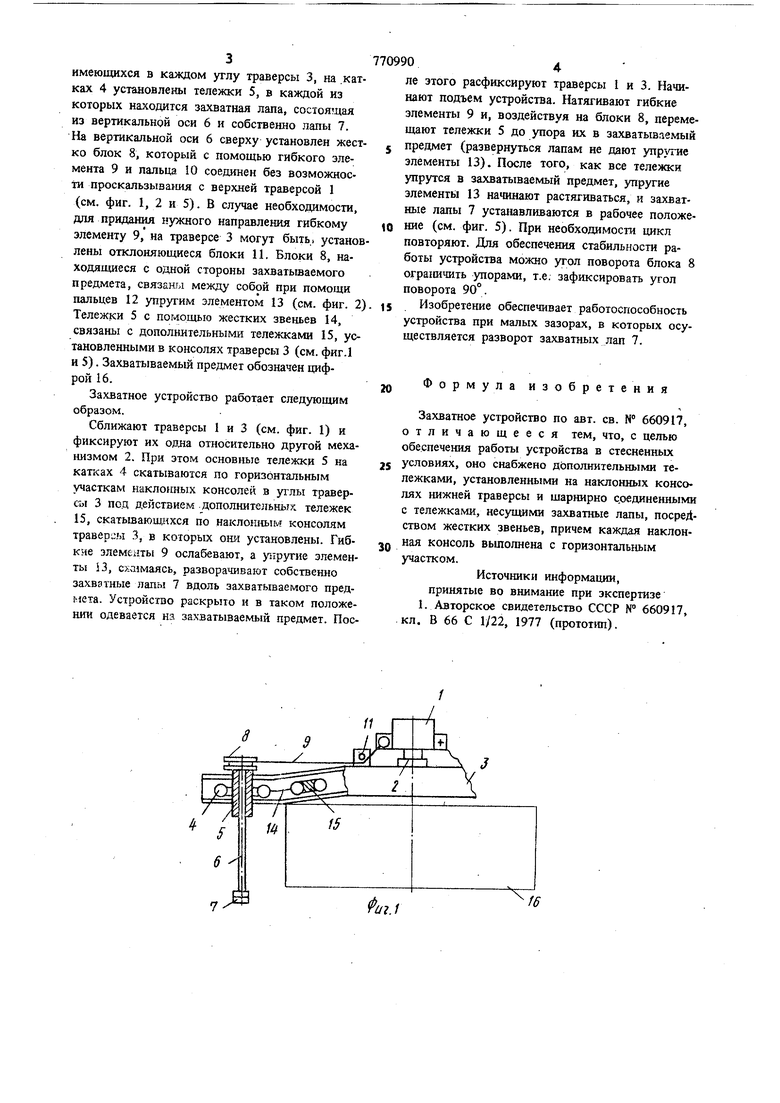
Изобретение относится к подъемно-транспортному машиностроению, а именно к захватным устройствам для перегрузки штучных и пакетированных грузов. По основному авт. св. N 660917 известно захватное устройство, содержащее верхнюю и нижнюю траверсы, соединенные между собой механизмом фиксации их взаи1 а1ого положения и установленные с возможностью перемещения вдоль нижней траверсы L-образные захватные лапы, связанные с верхней траверсой, причем нижняя траверса вьшолнена с наклонными кон солями, а каждая захватная лапа закреплена с возможностью поворота вокруг вертикальной оси на тележке, установленной на консоли, и снабжена закрепленным на ней блоком, соединенным с верхней траверсой, гибкой тягой, при этом каждая пара блоков захватных лап, расположенных с одной торцовой стороны травер сы, связана между собой, упругим элементом, а концы тяг и упругих злементов жестко зафиксированы на блоках I1). Целью изобретения является обеспечение надежной v работы устройства в стесненных условиях. Цель достигается тем, что в предлагаемое устройство снабжено дополнительными тележками, установленными на наклонных консолях нижней траверсы и шаршфно соединенными с тележками, несущими захватные лапы, посредством жестких звеньев, причем каждая наклонная консоль выполнена с горизонтальным участком. На фиг. 1 показано устройство в раскрытом положении, одетое на захватьшаемый предмет; на фиг. 2 - то же, вид на фиг. 3 разрез по наклонной направляющей, в которой установлена основная тележка, несущая захватную лапу; на фиг. 4 - блок одной из захватных лап, разрез (показан палец, с помощью которого крепится гибкий элемент); на фиг. 5 устройство в закрытом полозкешш перед началом подъема. Устройство состоит из верхней траверсы 1, соединенной с помощью механизма 2 фиксации с нижней траверсой 3, имеющей в плане Н-образную форму. В наклонных консолях. имеющихся в каждом углу траверсы 3, на .катках 4 установлены тележки 5, в каждой из которых находится захватная лапа, состоящая из вертикальной оси 6 и собственно лапы 7. На вертикальной оси 6 сверху установлен жестко блок 8, который с помощью гибкого элемента 9 и пальца 10 соединен без возможности проскапьзыва1шя с верхней траверсой 1 (см. фиг. 1, 2 и 5). В случае необходимости, для придания нужного направления гибкому элементу 9, на траверсе 3 могут быть, установ лены отклоняющиеся блоки 11. Блоки 8, находящиеся с одной стороны захватьшаемого предмета, связаны между собой при помощи пальцев 12 упругим элементом 13 (см. фиг. 2) Тележки 5 с помощью жестких звеньев 14, связаны с дополнительными тележками 15, установленными в консолях траверсы 3 (см. фиг.1 и 5). Захватываемый предмет обозначен цифрой 16. Захватное устройство работает следующим образом. Сближают траверсы 1 и 3 (см. фиг. 1) и фиксируют их одда относительно другой механизмом 2. При этом основные тележки 5 на катках 4 скатываются по горизонтальным участкам наклонных консолей в углы траверсы 3 поя действием .дополнительных тележек 15, скатывающихся по наклонным консолям траверсы 3, в которых они установлены. Гибкие элементы 9 ослабевают, а упругие элементы 13, схчимаясь, разворачивают собственно захватные лапы 7 вдоль захватьгааемого предмета. Устройство раскрыто и в таком положении одевается на захватываемый предмет. Пос04ле этого расфиксируют траверсы 1 и 3. Начинают подъем устройства. Натягивают гибкие элементы 9 и, воздействуя на блоки 8, перемещают тележки 5 до упора их в захватываемый предмет (развернуться лапам не дают упругие элементы 13). После того, как все тележки упрутся в захватываемый предмет, упругие элементы 13 начинают растягиваться, и захватные лапы 7 устанавливаются в рабочее положение (см. фиг. 5). При необходимое™ цикл повторяют. Для обеспечения стабильности работы устройства можно угол поворота блока 8 ограгшчить упорами, т.е. зафиксировать угол поворота 90°. Изобретение обеспечивает работоспособность устройства при малых зазорах, в которых осуществляется разворот захватных лап 7. Формула изобретения Захватное устройство по авт. св. № 660917, отличающееся тем, что, с целью обеспечения работы устройства в стесненных условиях, оно снабжено дополнительными тележками, установленными на наклонных консолях нижней траверсы и шарнирно соединенными с тележками, несущими захватные лапы, посредством жестких звеньев, причем каждая наклонная консоль вьшолнена с горизонтальным участком. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 660917, кл. В 66 С 1/22, 1977 (прототт).
8
Палец
J-ZriTia
J ±i
/ ё
4
(7.S
J
(г.
7id
