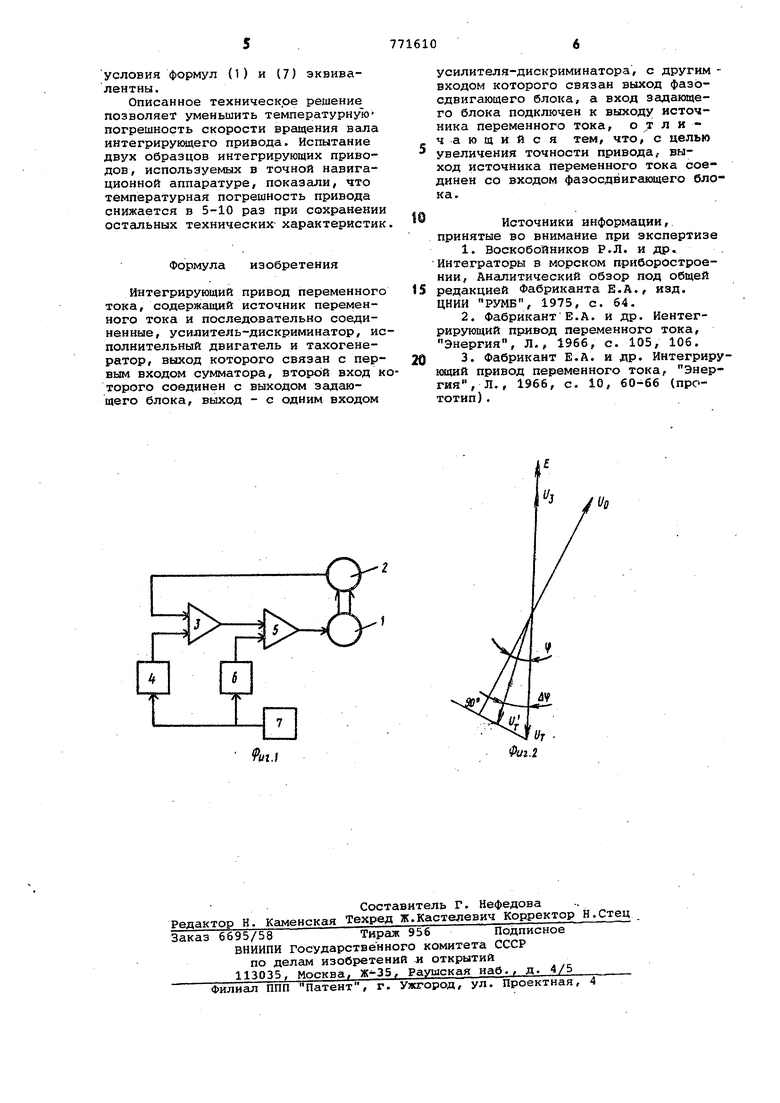
Изобретение относится к области автоматики и может быть использован при проектировании интегрирующих пр водов переменного тока, предназначенных преимущественно для использования в навигационной аппаратуре, работающей в условиях изменяшаейся температуры окружающей среды. Известен интегрирующий привод пе ременного тока lj , содержащий испо нительный двигатель, асинхронный та хогенератор, кинематически соединен ный с двигателем, задающий блок при вод, подключенный к источнику переменного тока, и сумматор, входы которого подключены к выходам тахогенератора и задающего устройства, а выход - через усилитель к двигателю. Недостатком такого интегрирующего привода является погрешность скорости вращения вала исполнительного двигателя, вызванная изменением температуры тахогенератора от его прогрева при работе и от измене ния температуры окружающей среды, а также Нсшичием квадратурного сигн ла и гармонических помех на входе .усилителя. Известен также интегрирующий привод переменного тока 2 , в котором с целью компенсации температурной погрешности в цепь обмотки возбуждения (или в цепь сигнальной обмотки) тахогенератора включен термозависимый контур, содержащий терморезистор с отрицательным температурньвд коэффициентом сопротивления. Такая компенсация температурной погрешности недостаточно эффективна из-за несовпадения температурных коэффициентов сигнала тахогенератора и термозависимого контура, а также различия в температуре тахогенератора и терморезистора. Наиболее близким к изобретению является интегрирующий привод переменного тока |з , содержащий источник переменного тока и последовательно соединенные усилитель-дискриминатор, исполнительный двигатель и тахогенератор, выход которого связан с первым входом сумматора, второй вход которого соединен с выходом задающего блока, выход - с одним входом усилителя-дискриминатора, с другим входом которого связан выход фазосдвигающего блока, а вход задающего блока подключен к выходу источника переменного тока. Введение в состав интегрирующего привода фазового дискриминатора позврляет существенно повысить точность за счет уменьшения влияния квадратур ного сигнала и гармонических помех на входе усилителя. Недостатком такого привода является температурная погрешность, определяющим фактором которой является изменение выходного сигнала тахогенератора от изменения температуры. Введение в таком приводе термо зависимого контура оказывается малоэффактивн151м. . Целью изобретения является увеличение точности привода пут-ем умень.шения температурной погрешности. Эта цель достигается тем, что выход источника переменного тока соединен со входом фазрсдвигающего блока. На фиг. 1 приведена блок-схема интегрирующего привода; на фиг, 2 -. векторная диаграмма интегрирующего привода. Интегрирующий привод содержит исполнительный двигатели 1, вал которого соединен кинематически с валом тахогенератора 2. Выход тахогенератора подключен к одному из входов сумматора 3, к другому входу сумматора подключен выход задающего блока 4. Выход сумматора подключен к входу двигателя через усилитель-дискриминатор 5. Опорный вход усилителя-дискриминатора 5 подключе через фазосдвигающий блок 6 к источ нику переменного тока 7 (источнику питания).К этому же источнику подключен вход задающего блока 4. Фазо сдвигающее устройство выполнено в виде RC-контура, параметры сопротив ления и емкости определены частотой источника питания и условием фазово го сдвига опорного напряжения усили теля-дискриминатора 5 относительно напряжения источника питания 7 на угол $ - arctg cK/fb, и ) где у - угол фазового сдвига опорно напряжения усилителя-дискриминатора относительно напряжения источника питани Л температурный коэффициент а плитуды сигнала тахогенера тора в 1/град С; Ь - температурный коэффициент фазы сигнала тахогенератора в рад./град С. Работа предлагаемого интегрирующего привода пояснена векторной диа ргиимой (см. фиг. 2), где Е - вектор напряжения источника питания; Цд - вектор опорного напряжени усилителя-дискриминатора и - вектор сигнала задающего блока; и - вектор сигнала тахогенератора в начальных темг.аратурных условиях; и - вектор сигнала тахогене- ратора в измененных температурных условиях; (р - угол фазового сдвига сигнала тахогенератора относительно опорного напряжения усилителя-дискриминатора;ДЧ1 - угол фазового сдвига между векторами Uj, и U, возникающий за счет изменения температуры. Проекция вектора сигнала U на нап авление вектора опорного напряжения e является сигналом отрицательной братной связи, регулирующей скорость ращения интегрирующего привода, ледовательно условием независимоеи скорости вращения привода от измеения температуры будет уравнение U Coscf итСоз(Ч) -|4ф) (2) В уравнении (2) 1)- и U - амплиту-. а сигнала тахогенератора. Векторы у и U|связаны между собой завиимостьюи; в U il-oct)(3) .y с (itit) де t - величина изменения температуры относительно начальных температурных условий, в град С. При подстановке выражений (3)и () равнение (2) преобразуется к виду (pU(.-o(.t){cosq)-co&(({J&in(5t).. При учете того, что величины cf. и р имеют порядок примерно Ю , а величина t обычно не превышает неркойьких десятков градусов, уравнение (5) упрощаемся tp U(co. cos ч + |bt sin ф). Из уравнения (б)определяется значение угла ф , при котором скорость вращения привода не .зависит от температурных изменений . ф arctgoi/fb (7) Так как в интегрирующем приводе выходной сигнал задающего блока 4 совпадает по фазе с напряжением источника питания 7 (или при перемене, направления вреицения имеет фазу 180), а выходной сигнал тахогенератора S начальных температурных условийх установлен в противофазе с сигналом заданвдего блока 4, то вносимый фазосдвигающим блоком 4 фазовый сдвиг опорного напряжения относительно напряжения источника питания 7 вызывает такой же фазовый сдвиг опорного напряжения и относительно сигнала тахогенератора 2, т.е.
условия формул (1) и (7) эквивалентны.
Описанное техническое решение позволяет уменьшить температурнуюпогрешность скорости вращения вала интегрирующего привода. Испытание двух образцов интегрирующих приводов , используемых в точной навигационной аппаратуре, показали, что температурная погрешность привода снижается в 5-10 раз при сохранении остальных технических характеристик
Формула изобретения
Интегрирующий привод переменного тока, содержащий источник переменного тока и последовательно соединенные, усилитель-дискриминатор, исполнительный двигатель и тахогенератор, выход которого связан с первым входом сумматора, второй вход которого соединен с выходом задающего блока, выход - с одним входом
усилителя-дискриминатора, с другим входом которого связан выход фазосдвигающего блока, а вход задающего блока подключен к выходу источника переменного тока, отличающийся тем, что, с целью увеличения точности привода, выход источника переменного тока соединен со входом фазосдвигающего блока.
Источники информации,, принятые во внимание при экспертизе
1.Воскобойников Р.Л. и др Интеграторы в морском приборостроении. Аналитический обзор под общей
редакцией Фабриканта Е.А., изд. ЦНИИ РУМБ, 1975, с. 64.
2.Фабрикант Б.А. и др. Иентегрирующий привод переменного тока, Энергия, Л., 1966, с. 105, 106.
3. Фабрикант Е.А. и др. Интегрирующий привод переменного тока, Энергия, Л., 1966, с. 10, 60-66 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрирующий привод переменного тока | 1976 |
|
SU602914A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Интегрирующий привод переменного тока | 1980 |
|
SU949631A1 |
| Способ настройки интегрирующего привода переменного тока с каскадно соединенными тахогенераторами | 1985 |
|
SU1453363A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Устройство для управления непосредственным преобразователем частоты | 1971 |
|
SU576654A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1982 |
|
SU1051678A1 |
| Интегрирующий привод | 1976 |
|
SU822144A1 |
| Привод ориентации шпинделя металлорежущего станка | 1984 |
|
SU1241194A1 |
Фиг.2
